无人机数据链时延测试方法
2022-05-30孙婧孟景涛刘素婵周汶昊刘琦张爽
孙婧 孟景涛 刘素婵 周汶昊 刘琦 张爽
摘要:随着无人机在现代战场与民用领域中的飞速发展,数据通信的可靠性、有效性、及时性和隐蔽性等要素也被提出了更高的要求。时延是无人机通信质量中最重要的性能指标之一。通过对时延的组成与数据链基本特性的研究,首先介绍了2种曾广泛使用的数据链时延测试方法。随着无人机数据链设备集成度越来越高,数据链协议越来越多样化,以往的测试方法已经不再适用。针对目前遇到的问题,提出了一种基于高精度时间计数器的、更具有通用性、准确度更高的新测试方法,并对测试流程和处理时序进行了研究。经过软件实现、工程实践和验证,证明测试方法可行,测试结果可信,为数据链指标测试方法的标准化提供了支持。
关键词:无人机;数据链;时延;自动化测试
中圖分类号:TP319文献标志码:A文章编号:1008-1739(2022)12-47-5

0引言
在军事需求的牵引和高新技术的推动下,无人机已经成为现代和未来航空武器装备发展的热点之一。无人机数据链实现地面控制站与无人机之间的数据收发,用于无人机遥控、遥测、跟踪定位和任务载荷信息传输。数据链包括安装在无人机上的机载数据终端(ADT)和设置在地面的地面数据终端(GDT),其性能和规模在很大程度上决定了整个无人机系统的性能和规模。通常,评价无线链路的性能有链路中断概率、时延、信道误码率和丢包率等性能指标,其中时延对无人机通信、控制甚至操纵性有非常大的影响。
本文介绍了无人机数据链时延测试的3种方法及各自的优劣,第3种方法是目前最新的测试方法,具有精度高、通用性强的显著优势。
1时延测试原理
数据链系统是一个准实时系统,要求上、下行链路的数据链路的传输时延尽可能的小,以完成对无人机状态实时控制和各种遥测、飞控和载荷信息的实时下传功能。
由于无人机数据链设备集成度越来越高,数据链协议越来越多样化,以往使用示波器捕捉数据帧发送与接收的信号波形,计算传输时延的方法不再适用。以下将介绍一种现阶段普遍使用的无人机地空闭环时延测试的通用方法。
首先分析时延的组成,上行链路的各种处理过程和传输过程会给数据传输带来延时,当地面数据终端和地面控制站之间采用同步数据接口时,链路时延的具体组成主要包括:地面数据终端数据处理时间、测试帧数据传输时间、加解编码处理时间、电波传输时延、链路处理时延和数据处理时延。
下行链路的各种处理过程和传输过程会给数据传输带来延时,链路时延主要包括:机载数据终端数据处理时间、接收和数据编帧、帧传输时间、电波传输时延、纠错编码加解时延、链路处理时延和数据处理时延。测试原理图如图1所示。

2时延测试方法概述
2.1时延测试方法1
早期测试传输时延多使用示波器捕捉数据帧发送与接收的信号波形,计算传输时延,测试原理图如图2所示。

这种方法的测试精度主要靠示波器精度来保证,操作简单、快捷,测量结果准确,基本没有误差。由于信号都是以近光速的速度进行传播的,因此地面数据终端与机载数据终端之间以有线或无线连接对测量结果影响不大。但随着系统集成度逐渐变高,数据链不再提供模拟信号的电平输出,同时数据链协议也越来越复杂,在示波器上捕捉回环的数据帧变得越来越不可实现,这种方法便逐渐不再适用。
2.2时延测试方法2
设计了第2种简单易行的测试方案,使用计算机计时,给测试帧打时标,按照数据链的帧频循环发送测试帧,测试传输时延。测试原理图如图3所示。

若采用计算机本地时间计时,方案简单,但是精度只能到ms级,而且机载数据终端接口类型众多,测试工控机无法适配所有类型的接口,因此时延测试也有一定的局限性,测试无法覆盖所有接口类型。
2.3时延测试方法3
近两年又设计了第3种更加通用的测试方法,该方法利用精度为5 ns的时间计数器,通过测试计算机启动时延测试程序,按照与数据链相同的帧频循环发送测试帧,在测试数据发出前查询计数,将时间计数打入测试帧作为时标,收到测试数据后再次查询计数器计数,计算时间差,得出链路传输时延。
本方法采用时间计数器作为计时设备,采用FPGA实现,FPGA使用内部200 MHz高精度时钟计数,PowerPC收到网络指令后上报FPGA计时,整个计时过程PowerPC到FPGA延时相对固定,5 ns精度由FPGA来保证。
地面接口适配器一般需要具备网口、异步串口接口,机载接口适配器需要将同步串口、异步串口、SRIO、CAN和LVDS等机载常用接口转换为网络打包传送给测试计算机。
下文将详细介绍第3种最新的时延测试方法。
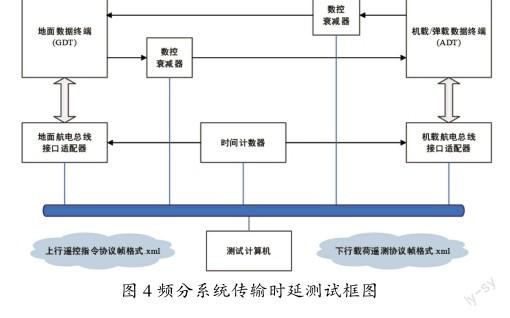
2.3.1测试框图
该指标测试基于图4所示的测试原理,并以频分系统为例说明测试方法,测试框图如图4所示。
2.3.2测试流程
上行链路时延测试系统测试流程:需要待上行链路电平处于标称余量状态;链路厂家提供描述上行遥控载荷指令和飞控指令等可以回环的协议格式的XML文件,测试软件加入GCS载荷控制计算机,代替GCS载荷控制软件或飞控软件;测试主控计算机与GCS网络互连,根据载荷指令和飞控指令等XML协议文件发送模拟指令到GDT。经过接口适配器将ADT航电总线接口输出的遥控数据接口转为RS422异步数据接口或網络接口,通过串行、网络光端机等送到主测试计算机,根据发送、接收时间统计指令序列延时。
下行链路时延测试系统测试流程:下行链路时延测试需要待下行链路电平处于标称余量状态。链路厂家提供描述下行载荷遥测和下行飞控遥测等可以回环的协议格式的XML文件和ADT接口适配器;测试软件加入GCS载荷控制计算机,代替GCS载荷控制软件和飞行控制软件;测试主控计算机与GCS网络互连,根据载荷遥测或飞控遥测等XML协议文件发送模拟载荷遥测和模拟飞控遥测,并记录、打时标,通过串行、网络光端机发送到ADT接口适配器,通过航电总线接口送ADT,通过ADT发送到GCS。
从测试软件的角度,无人机地空闭环时延测试通用流程如下:
①通过测试软件输入被测数据链的上下行帧格式、帧内容和收发两项的接口信息;②测试设备加电,地面数据终端和机载/弹载数据终端加电;③测试计算机与地面数据终端和机载/弹载数据终端建立通信连接,调整数控衰减器的衰减量,使数据链设备可正常工作并处于稳定锁定状态;④上行传输时延测试时,测试计算机按照被测数据链的帧频循环向地面接口适配器发送上行测试帧,并在测试帧中插入帧计数,实时从机载接口适配器接收数据帧,解析后查询计数器计数,计算时间差并显示,持续统计20组有效结果并计算平均值,扣除测试误差,得出上行时延测试值;⑤下行传输时延测试时,测试计算机按照被测数据链的帧频和设定的接口类型循环向机载接口适配器发送上行测试帧,并在测试帧中插入帧计数,实时从地面接口适配器接收数据帧,解析后查询计数器计数,计算时间差并显示,持续统计20组有效结果计算平均值,扣除测试误差,得出下行时延测试值。
链路时延测试流程序列图如图5所示。


时延测试软件链路时延测试处理过程如图6所示。
3软件实现与方法验证
选取了某型C频段数据链设备,按照测试连接图对设备进行连接,与地面航电总线接口适配器、机载航电总线接口适配器、时间计数器使用网线连接,组播通信。由于信号都是以近光速的速度进行传播的,地面数据终端与机载数据终端之间以有线或无线连接对测量结果影响不大,因此本次试验使用射频线缆进行有线连接。时延测试连接图如图7所示,试验现场实物图如图8所示。

软件运行环境采用Windows7操作系统,主频不低于2.4 GHz、4核CPU,内存8 GB。开发环境为VS2010开发环境。
数据链测试控制软件根据测试任务选择测试方法,按照设定的测试流程控制测试仪器及其他设备进行测试。按照其系统需求,其功能划分为测试任务管理、测试流程管理、测试仪器管理、其他设备管理、测试结果管理、数据链协议在线编辑和解析6项。
①测试任务管理:主要用于接收、解析、显示和存储测试任务,先将测试任务进行解析,然后将解析的测试任务显示在界面上,最后存储下发的测试任务。
②测试流程管理:根据测试的需要对测试流程进行管理,管理的内容为调度测试项、发送指令、读取数据控制序列以及计算测试结果等。
③测试仪器管理:对数据链测试系统中的测试仪器进行管理,管理的内容为连接测试仪器、发送控制仪器指令和读取测试仪器数据和状态。
④其他设备管理:对数据链测试系统中的其他设备进行管理,管理的内容为设备连接、设备控制和设备状态监视。
⑤测试结果管理:测试结果管理功能主要是对测试结果整理、存储和发送。
⑥数据链协议在线编辑和解析:提供ADT和GDT数据链协议的在线编辑和解析功能。
待数据链测试控制软件启动后,初始化软件环境和运行参数,与测试仪器和分机建立数据交互链接。初始化完成后,监听测试任务,等待人机界面或数据链电磁环境模拟分系统中电磁环境模拟控制软件发来的测试开始的命令。出现可用测试任务序列后,遍历当前任务库和方法库最终形成测试方法序列,完成测试任务和方法的调度。测试结束后,经过判定算法和对比后,以文件形式输出测试结果。
软件界面及测试结果如图9所示。

经测试,某被测数据链下行传输时延为186.015 13 ms。为验证测试的准确性,使用WireShark抓包工具,对测试结果进行验证。WireShark抓包结果图如图10所示。

按照源地址与目的地址筛选出收发2组数据包,由于测试数据包数量较多,不再详细展示每组测试结果。经计算,结果为186 ms。经验证,测试方法可行,测试结果准确可信。
4结束语
本文提出的无人机数据链时延测试方法是目前比较精确的测试方法之一,并且由于接口适配器适配的接口类型广,具有良好的通用性。但由于需要一个较为通用的接口适配器,测试成本明显高于其他2种方法。后续项目中需要进一步设法降低接口适配器的研发成本,优化软件设计,降低或固化计算机处理带来的时延误差,进一步提高测试结果的准确性和适用性。
参考文献
[1]李昂阳.无人机数据链系统设计与实现[D].北京:北京理工大学,2021.
[2]刘有才,闫云斌,裴薇薇,等.无人机数据链系统性能指标检测设备设计与实现[J].无线电工程,2019,46(6):540-544.
[3]尹川,支高飞,高盼.无人机数据链时延测试方法研究[J].信息系统工程,2017(6):135.
[4]闫云斌,田庆民,王永川,等.无人机数据链系统抗干扰性能评估指标及其测试方法[J].计算机测量与控制,2015,23(12): 3925-3928.
[5]何一,張亚妮,王永生.超宽带微型无人机数据链传输性能分析[J].西北工业大学学报,2009,27(2):245-249.
[6]曹凯.无人机数据链组网技术的研究[D].西安:西安电子科技大学,2016.
[7]刘素婵.通用无人机链路设备自动测试系统设计与实现[D].西安:西安电子科技大学,2014.
[8]古雪鹏,陈怀进,周峰.基于效用函数的通信对抗作战能力评估[J].电子信息对抗技术,2011,26(4):50-53.
[9]王欢欢.对无人机安全问题的思考及解决思路[J].科技风, 2019(4):65.
[10]吴立巍.无人机飞行试验要素分析[J].电子技术与软件工程,2015(24):139.
[11]吕明春.无人机系统测控链路质量性能检测技术研究[J].质量与可靠性,2018(2):10-12.
[12]马文良.无人机通信链路抗干扰问题研究[J].互联网通信, 2017,19(1):35.
[13]邓剑挺.无线通信系统的效能评估的方法研究[D].成都:电子科技大学,2014.
[14]施清平,王洋,康健,等.一种军用无线通信性能评估系统设计[J].航天器环境工程,2015,32(2):224-228.
[15]潘琢金,陈方瑞,罗振,等.无人机数据链传输时延建模及其补偿[J].现代计算机(专业版),2016(14):10-13.
[16]胡林,莫翠琼,韩英永,等.自动测试系统通用接口适配器设计[J].四川兵工学报,2013,34(3):86-88.
[17]姜景伟,李国林,周鹏飞.某型引信自动测试系统接口适配器的设计[J].四川兵工学报,2015,36(4):25-28.
