面向地下空间的智能轨道巡检机器人系统研究
2022-05-30黄奚芳陈彬陈飞陈楠赵天刚
黄奚芳 陈彬 陈飞 陈楠 赵天刚
摘要:为了提升隧道交通安全的应急联动能力和节约运营管理,我们研制开发了一种应用于地下空间的智能轨道巡检机器人系统技术及方案设计,本文详细描述了巡检机器人-本体设计、轨道系统设计和远程控制中心系统设计。机器人的巡检控制系统能够进行5种模式的巡检,各模式灵活切换,满足不同的管理需求。通过环境测试以及改良后,巡检机器人工作性能更佳,能够适应复杂的地下空间、隧道等建设期和运营期,研究具有一定参考价值。
关键词:巡检机器人;地下空间;模式切换;建设期和运营期
一、引言
随着IT技术的高速发展,在土木工程领域内运用高新技术手段,如智能化、机械化的装备,监控地下空间/隧道的状态,并对病害预识别和预警,对地下空间是否能健康运营管理和安全耐久使用、避免造成非必要的损失,有着至关重要的意义[1]。那么如何利用隧道智能巡检机器人[2]及其相应的集成化技术,实时掌握、处理和发布地下空间/交通的运行情况和预警信息,提高地下空间内的安全应急反应力,同时向管理人员、司机、乘客及相关人员提供方便、快速、有效的行车安全预警信息服务[3-4]。
本文从隧道现场的实际需求出发,提出了一种面向地下空间的智能轨道巡检机器人系统,该机器人是一款结合物联网、机器人和人工智能技术的现代化基础设施管理智能装备。该机器人分为巡检机器人-本体、轨道系统和远程控制中心系统。
二、巡检机器人-本体
巡检机器人-本体接收远程操控系统的命令控制,驱动相关执行器来输出机械机构,同时将机械机构的状态、环境信息与机器人的运行状态由网络通信传输给远程控制中心系统,将进行相关信息处理。巡检机器人-本体具有走行、智能感知、毫米级定位、无线充电等功能。
(一)巡检控制系统
为实现高度自动化和智能化,该巡检控制系统可实现在地下空间内自主地进行的巡检。机器人-本体按照管理员预先设定的模式巡检任务,通过任务规则自动完成对周边环境、设备等监测活动。巡检任务模式分为2种:自动化巡检和手动遥控巡检。
1.自动化巡检
自动化巡检即通过预设路线进行巡檢任务,自动化巡检任务模式可自由切换,主要包含:定时任务巡检、常规巡检、特殊巡检、反复巡检和一次性巡检。本体上配备拾音器、红外摄像头、气体环境监测等监测设备,进行可见光拍摄、红外光拍摄、轨道范围内的巡检及周边环境监测等巡检任务,并将巡检数据、视频数据和图片数据自动同步到远程控制中心系统留档,同时根据制式表单生成可直接上报的报表。
2.手动遥控巡检
除自动化巡检模式以外,管理员采用手动遥控巡检模式实时遥控机器人-本体的走行。此手动模式适用于锁定和监测某一种类设备状态,特别是在自动化巡检时,若检测到设备或周边环境有异常预警,管理员可立即用远程控制中心-手动遥控页面/远程遥控手柄,将机器人-本体移动至异常位置,及时查看并核实报警的真实性,为领导和管理人员提供响应策略支持。
(二)实时视频系统
通过机器人自身携带的可见光摄像机,完成视频图像的数据采集,对隧道内的实际状况实现视频监控,进行事故现场查看,处理事故,并通知组织救援。
高清图像采集系统——具有高清视频和红外视频双摄功能,可以360度采集图像并实现对于影像的记录。
内置图像算法——为智能分析处理图像和视频流数据,设计并研发了高精度图像识别算法,该算法是完全自主可控的,实现对于隧道实景(衬砌、路面)结构影像展布图拼接,支持存储导出功能,从而全面掌握隧道内结构及环境的状态信息。
(三)隧道内环境检测
机器人能对气体、温度、湿度等环境信息进行实时监控,为管理人员分析设备运行状态提供全方面信息。智能巡检机器人自身携带的环境监测模块,能够监测环境中的有害气体、温度、湿度、烟雾等环境信息。
移动连续检测隧道内的有毒有害和易燃易爆气体,机器人实时采集的环境信息及时传输到控制中心,为操控人员提供现场环境信息,当监测到有害气体超标时,系统将进行报警,以提示管理人员及时处理。
(四)机器人自检
机器人作为巡检系统的主体,搭载主要的检测设备在前端采集各类数据信息。为了保证机器人日常工作的开展,机器人在启动巡检前均会进行自检,自检内容包括高清相机、电机、云台、内部存储及各种传感器等,若发现部件异常,则给出异常状态指示,并将系统异常信息上传至监控后台,方便管理人员及时发现故障,减少处理时间,提高解决故障的效率。
(五)通信系统
面对地下空间的长距离和大范围的通信场景,同时考虑多种设备的无线接入需求,如:机器人-本体、IoT和移动终端等,且还要综合全覆盖的通信需求。因此,首先按照500米一个点位在线性的地下空间布置无线通信基站,保证每个基站在一定的通信范围内重合,同时在线性弯曲点布置通信基站的点位;其次,为提高可靠性,采用光纤环网来实现地下空间内部的无线全覆盖通信,同时也支持通信漫游,任意点带宽支持≥60Mbps,无线信号强度≥-50dBm。
(六)导航定位方式
为使管理员能获取机器人的实时位置信息,我们为机器人安装了定位系统。对于地下空间自动巡检机器人来说,一套快速、精确的定位系统是极为重要的[5]。因为当机器人在巡检过程中发现隧道内出现异常状况时,通过定位系统,控制平台侧可以迅速确定异常状况所在位置,并予以排除。
本文设计的机器人是通过RFID超高频电子标签、伺服电机里程盘和定位系统相结合,来准确获取定位信息,以消除积累误差,目前已做到毫米级定位,保障管理员能够实时获取本体的定位信息。
(七)大容量电池充电
在机器人-本体上装备了超大容量的锂电池包,综合考量电池寿命、环境和维修的便利性,将电池包设计成可拆卸的。同时为方便充电,在轨道系统旁多个位置安装无线充电站为电池充电。机器人-本体的控制系统实时监控电池的电量状态,当电量低时自动移动到充电站充电。
动力电池是智能监测机器人的能量来源。因此,在选取机器人的电池时尤为谨慎,结合多个关键指标,如:能量密度、充放电倍率、充放电循环次数、工作温度范围、有无记忆效率等,在市场范围内进行筛选;同时,综合价格、稳定性、使用寿命、电池包大小等因素选择。最终,还要考虑到电池尺寸、出线方式等各种因素,若市面上现有的锂电池不能满足各类要求,就需要定制了一款适配此机器人的锂电池。
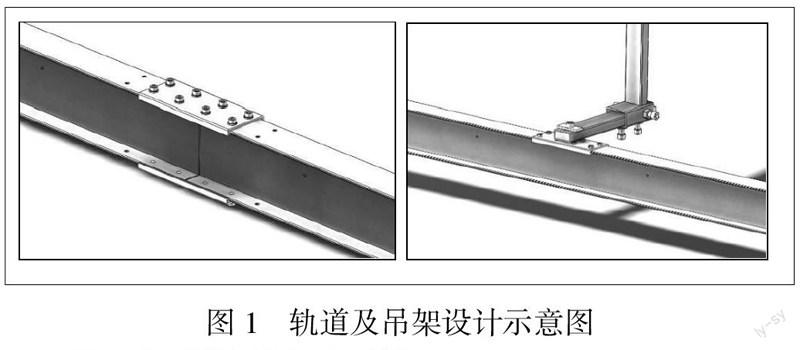
三、轨道系统
轨道系统从地下空间的实际需求出发,以简易化和轻量化的设计原则进行设计,可实现简易化安装部署、灵活拆解。轨道设计是采用上承载,下支撑结构,使轨道受力均衡;轨道整体结构配合运行设备结构设置,使结构相互吻合,达到设备不脱轨。
轨道是以铝铸加工制作铝制轻型导轨,轨道精度达到±0.1毫米,轨道4米/根,导轨宽度0.048米,高度 0.077米,每根头尾有6个固定安装孔;轨道起点安装充电装置,用于电池包的充电,接入电源为220V,输出电压为48V;通过技术设计验证,解决现有轨道的设备移动速度慢的困扰,轨道设计承载时速为 0~12km/h。
四、远程控制中心系统
远程控制中心系统可实现机器人巡逻数据日志的上传、分析和处理,根据预先设定的监控及检测功能和检测点清单,生成统计分析和预警报告,并回传给后台,为人工的后续处理和决策提供参考;巡检数据包含隧道衬砌结构、路面、环境信息、事故信息等。
(一)输出自动报表
机器人根据巡检情况自动汇总数据生成制式表单,在完成任一巡检任务后管理员可直接在远程控制中心平台上查看当前任务报表,也可通过巡检类型、任务名称和时间等筛选条件查看往期报表。不同类型的巡检会产生不同的报表,包括巡检任务报表、数据报表、报警记录报表、环境信息报表等。
(二)预警与联动
机器人-本体在自动化巡检/手动巡检中,通过多种技术手段,如:视频流/图片的AI世界分析技术、數值对比分析、趋势图分析等,可快速、自动化预警异常数据信息。预警异常信息通过远程控制中心系统-报警界面和机器人-本体上的语音播报和警示灯报警,向远程管理人员和现场人员进行预警,提醒管理人员和现场人员注意周边情况,及时和快速地作出应对,保障现场人员的安全。当后台分析数据显示为异常时,后台监控软件界面会出现告警信息列表,管理人员通过操作滚动显示告警信息。当系统存在告警信息时,系统通过巡检机器人告警音频及灯光闪烁,提醒管理人员注意。
五、测试及方案调整
巡检机器人完成设计、组装和调试后,选取了1公里的隧道环境进行适应性测试。测试过程中,发现机器人多次出现以下问题:锂电池包出现快速衰减状态;发送充电指令,机器人-本体到达充电位,但未充上电。经过反复测试论证,增加以下两个方案来解决。
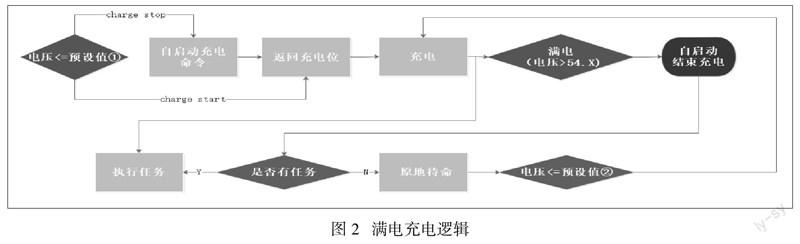
(一)满电自断电模式
智能轨道巡检机器人使用大容量锂电池,反复充满电会降低锂电池的寿命,为了改善这一情况,本文设计了一款自动充电逻辑方案:在“电压值<预设最低电量”时,机器人会自动回到充电位进行充电;当“电压值>54.X”时,自动结束充电,若无巡检任务则原地待命。其逻辑图如图2所示。通过验证,此逻辑有效减少了电池反复充电的情况,大大降低了锂电池的衰减。
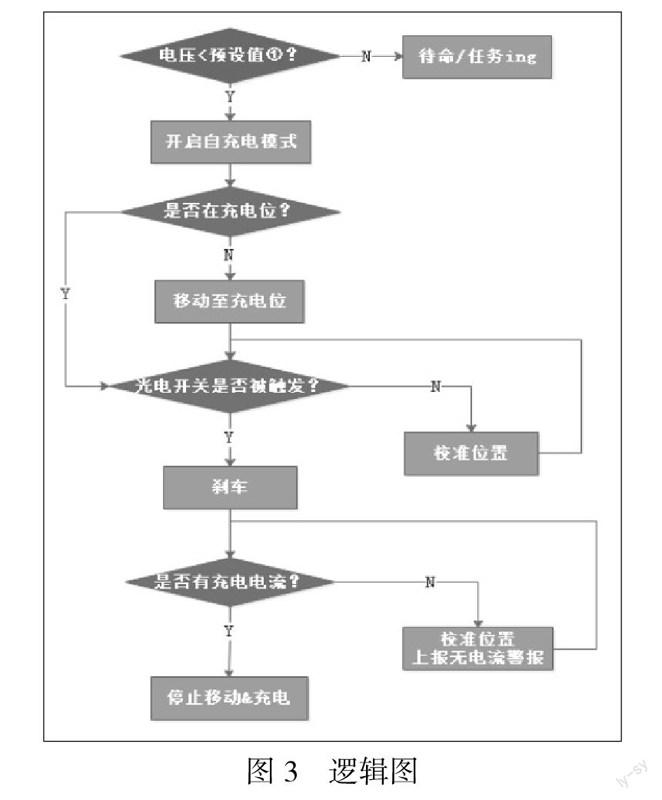
(二)充电定位偏移调整模式
为了解决由于位置偏差导致未充上电,需要人工去现场充电情况,本文设计了一种充电定位方案,在启动充电模式后,系统会自动检测机器人内置的光电开关&充电电流是否被触发,若未触发则会一直移动直到充上电,并进行预警提示提手动远程操作。其逻辑图见图3所示。通过验证,此方案提高了充电有效性,一定程度上减少了人工充电和调试成本。
六、结束语
本文设计了一种面向地下、隧道等的智能轨道巡检机器人,该机器人可前、后行走,可运用于环境复杂的地下空间、隧道等建设期和运营期。通过功能、性能以及环境适应性测试,目前机器人的自动巡检、遥视巡检和定期巡检可满足管理人员的不同阶段的管理需求,实时掌握隧道内实时信息和环境信息;此外,机器人的定位精度可达毫米级,使得管理人员能在控制中心快速确定异常状况所在位置,及时派遣工作人员前往予以排除。远程控制中心的操作是可视化的、简便、直观的。该智能轨道巡检机器人具有较好的可用性和易用性。
作者单位:黄奚芳 陈彬 陈飞 陈楠 赵天刚 上海城建信息科技有限公司
参 考 文 献
[1]李辰迪,王艳新.RFID技术在机器人室内定位中的应用[J].中国教育技术装备,2013.
[2]吴锴,左兆陆,窦少校.我国轨道式巡检机器人研究及发展现状J].软件,2018,39(11):80-83.
[3]鲁守银,张营,李建祥,等.移动机器人在高压变电站中的应用J].高电压技术,2017,01(43):278-279.
[4]配电室巡检机器人室内挂轨式巡检机器人解决方案[J].石初,杨开九,吉小亮,杨春江.无线互联科技.2021(20).
[5]杨学亮,项安,刘青松,等.基于RFID的轨道机器人定位系统研究[J].机电一体化 ,2012(9):18-21.
[6]郭波超.管廊轨道巡检机器人动态无线供电系统的研究与设计[D].江西理工大学,2019.
