舰载无人直升机自主着舰方法研究
2022-05-30于淼

摘要:针对我国无人直升机舰上使用不易实现的问题,在研究无人直升机自主着舰引导方法的基础上,对着舰过程中直升机与舰船的位置和状态建立模型,提出一种基于舰船运动预测与补偿、飞机与舰船运动姿态匹配的自主着舰引导/控制策略,给出了无人直升机自主着舰引导系统方法,为实现无人直升机自主着舰提供了较为有效的解决方法和技术手段。
关键词:无人直升机;自主着舰引导;着舰控制;运动预测与补偿;自抗扰控制
中图法分类号:V279文献标识码:A
Research on autonomous landing method of shipborne unmanned helicopter
YU Miao
(The 27th Research Institute of China Electronics Technology Group Corporation,Zhengzhou 450047,China) Abstract:In purpose of solving problem of the difficult implementation of unmanned helicopter for shipboard use, this paper firstly studies autonomous landing schemes for ship-borne unmanned helicopter, then an autonomous tracking scheme based on ship motion measurement and compensation,aircraft and normal motion is proposed. The method of autonomous landing and receiving system of unmanned helicopter is given, which provides a strategic solution and technical means for autonomous launching of unmanned helicopter.
Key words: unmanned helicopter, autonomous carrier landing, landing control, motion prediction and compensation, active disturbance rejection control
1引言
為了顺应现代海战的立体化作战趋势,维护海洋权益,保障领海安全,世界各国都在大力研发舰载无人机,以保证在海上制空权争夺中占得先机。舰载无人直升机能够灵活起降于舰船上,执行护航、反潜、反舰等作战任务,舰船伴随性好,能够有效补充海基航空力量,提升舰艇编队的作战能力,在未来信息化海战中占据着举足轻重的地位[1]。
相比于传统的地面起降,舰载无人直升机在中小型舰船上起降更加困难且危险[2]。这是因为在舰船上起降易受复杂的海面气象状况、舰船的六自由度扰动、异常复杂的大气紊流以及极其有限的甲板长度等因素的影响,这将直接威胁舰载无人直升机的着舰安全[3]。因此,研究无人直升机自主着舰技术,对舰载无人机的安全回收具有重要意义。
世界各国均在不断加大对自主着舰系统的研究投入。欧洲国家因为海军使用的军舰相对较小,则更偏向于使用中小型海上无人直升机系统。欧洲制造商正在加紧为这些系统研制适合的远海高海环境下使用的“自主?垂直起降”(Auto?VTOL)系统。
“甲板搜索者”系统是法国EADS?Astrium公司研制的一种自主垂直起降系统,该系统采用基于空间的 GPS 技术,通过6颗卫星与相应的机载接收机使无人直升机在固定和移动平台上完成全自主起飞和着舰,虽然不能预测船舶运动,但可帮助垂直起降的无人机找到最佳降落点。该系统包括舰船段和机载段,舰船段可以临时快速部署,或永久安装在舰船的直升机起降甲板周围;机载段则由两个向下导向的天线、一个轻量级的接收器和一个机载计算机组成,可以配置在任何重量小于1.2kg 的 VTOL?UAS 上。2011年,德国用1架安装了“甲板搜索者”系统的瑞士 NEO S?300 VTOL?UAS 在极冷的条件下于德国联邦警方船“布雷德斯泰特”上进行了测试。
在研究目前着舰系统基础上,本文提出了一种基于舰船运动预测与补偿、飞机与舰船运动姿态匹配的自主着舰引导/控制策略,给出了无人直升机自主着舰引导系统方法,为实现无人直升机自主着舰提供了较为有效的解决方法和技术手段。
2系统组成与原理
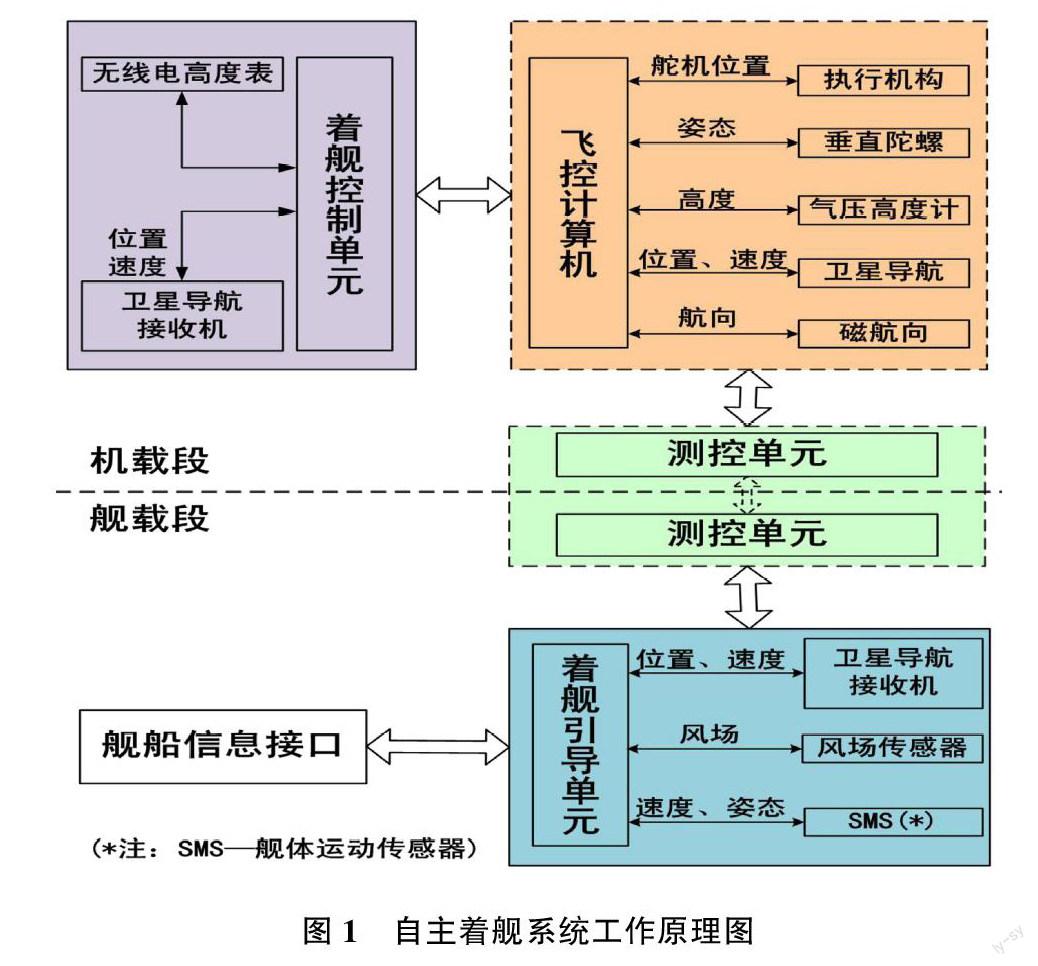
自主着舰系统主要由机载着舰控制分系统、舰载着舰引导分系统组成[4~7]。
如图1所示,当无人直升机飞至母舰附近降落时:(1)舰载卫星导航接收机与舰体运动传感器将当前舰船的位置、速度、姿态以及海上环境信息发送至着舰引导单元,着舰引导单元将舰船信息整合并通过测控单元上传至直升机;(2)着舰控制单元根据接收到的舰船信息,结合卫星导航接收机、垂直陀螺等机载设备获取的直升机位置、速度、姿态信息,计算出直升机与舰船的相对位置、姿态与速度;(3)机载舰船运动补偿与预测软件将根据舰船的运动规律预估舰船运动趋势,并联合舰控制单元随时调整飞行操作指令;(4)着舰控制单元将飞行操作指令发送至飞控单元,调整直升机至跟踪状态,最终使无人机跟随舰船做平移运动;(5)当无人机与舰船的相对位置、姿态与速度保持稳定后,控制下降的速度降低飞行高度,接近着舰区域;(6)通过考虑舰船的摇摆运动和沉浮运动,将直升机与舰船的相对速度控制在合适的速度之下,并确保在甲板处于水平或下沉状态时触舰。
至此,舰载无人直升机实现自主着舰。
3关键技术
3.1舰船运动预测及补偿技术
舰载机需要在舰艇的飞行甲板上进行着舰,但舰体因为受到风浪的影响,会产生横摇、纵摇、升沉等运动,导致着舰区域产生六自由度的空间位置变化,严重影响着舰安全。舰船运动补偿及预测技术能够降低舰船与直升机相对运动对着舰的不利影响。
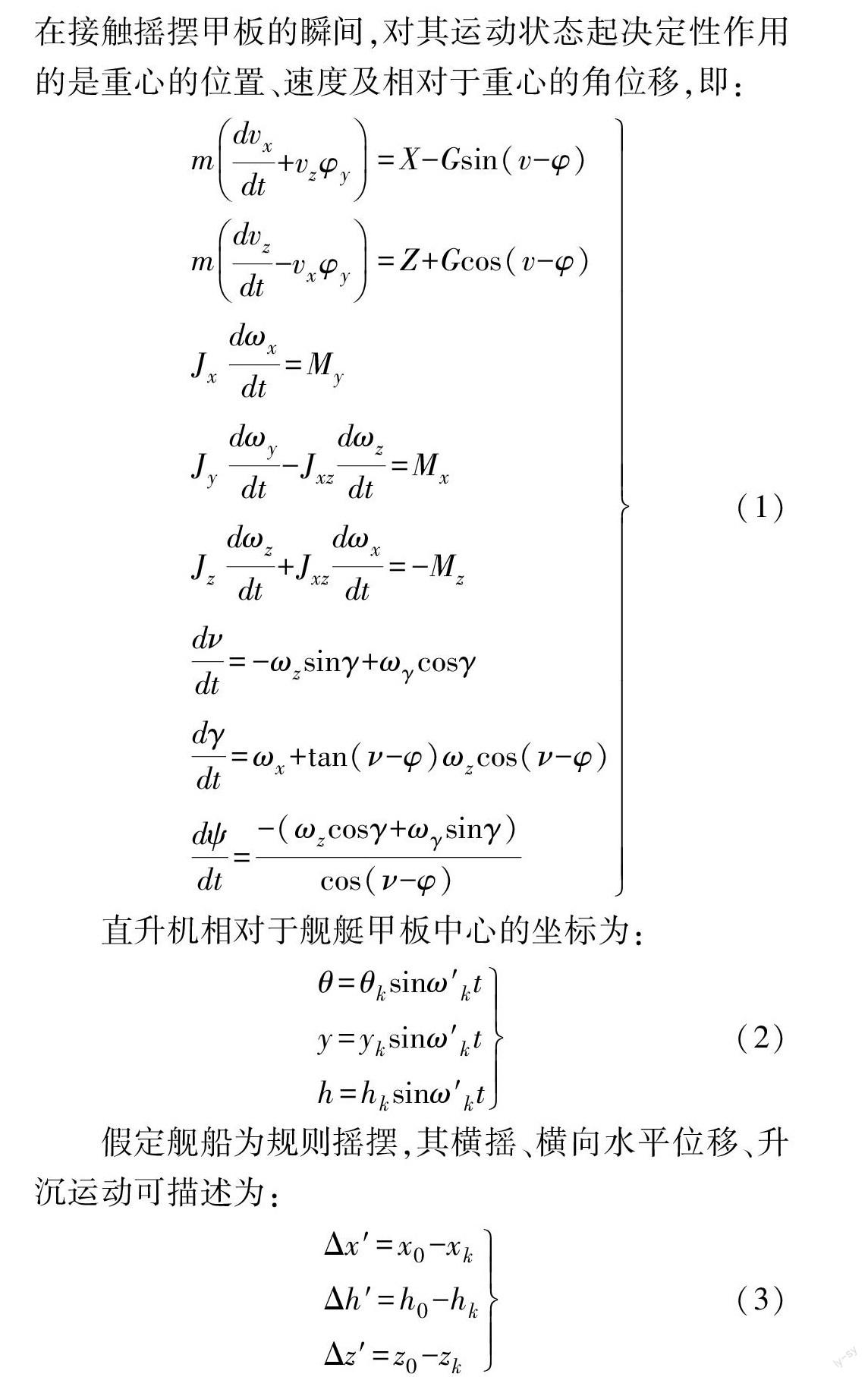
分别建立舰船与舰载直升机的运动方程,直升机在接触摇摆甲板的瞬间,对其运动状态起决定性作用的是重心的位置、速度及相对于重心的角位移,即:
直升机相对于舰艇甲板中心的坐标为:
假定舰船为规则摇摆,其横摇、横向水平位移、升沉运动可描述为:
采用功率谱密度法,得到舰体运动模型。在着舰前,自主着舰控制系统引入舰船运动因素,确保无人机可以随动舰船。为了顾及舰船的位置信息,采用卡尔曼最优滤波原理设计舰船运动预估器。同樣地,为了保障飞机在着舰的最后时段跟踪着舰点运动,设计运动补偿网络[8~9]。兼具舰船运动补偿及自主着舰导引系统[10]如图2所示。
3.2自抗扰控制技术
由于舰载无人直升机在着舰过程中,机上没有飞行员参与直升机的应急控制,而且直升机不但受到直升机本体不稳定结构扰动,还会受到海况特点和舰尾气流扰动的影响,因此采用具有自抗扰功能的导引控制系统。
本文采用二阶自抗扰控制器设计纵向自主着舰导引系统。它采用非线性结构,利用误差大小和方向来实施非线性反馈控制,破除了传统极点配置弊端[11]。
首先,二阶跟踪微分器的方程为:
其次,扩张的状态观测器的方程为:
式(5)中,z21和 z22分别对应系统输出 y 及其一阶导数 y·的估计;z23为扩张的状态变量表示系统运行中扰动的实时估计。
最后,形成误差反馈控制律:
由以上三部分即可组成二阶自抗扰控制器(ADRC)。基于 ADRC 的纵向自主着舰导引系统[12]如图3所示。
3.3着舰控制策略与控制算法
自主着舰控制系统控制原理:首先,机载传感器将实时测得直升机飞行高度信息传递给舰载计算机,舰载计算机将其与内部存储的理想高度进行计算得出高度偏差量,之后将此偏差量传递给设计好的导引规律,并形成导引指令,此导引指令的目标是让此偏差量朝着变小的方向发展,之后通过无线电数据链将导引指令发送到无人舰载直升机飞控系统。飞控系统控制直升机沿着期望的着舰路径安全着舰。同时,要求在着舰过程中,舰载直升机要与舰船随动。基于此原理,在控制策略上,对无人直升机所处的状态进行细化,将舰面运动干扰和阵风减缓进行区分。通过这样的措施,建立起一个良好的控制对象,将系统误差降低到较小的范围,为控制器提供一个最优的设计空间。
4结束语
本文结合舰载无人直升机自主着舰的机舰运动特性与环境影响因素,提出了一种基于舰船运动预测与补偿、飞机与舰船运动姿态匹配的自主着舰引导/控制策略,给出了无人直升机自主着舰引导系统方法,为实现无人直升机自主着舰提供了较为有效的解决方法和技术手段。
参考文献:
[1]高嘉景.海军舰载无人机的现状及其发展趋势[J].舰船电子工程,2004(3):16?19+25.
[2]唐大全,毕波,王旭尚,等.自主着陆/着舰技术综述[ J].中国惯性技术学报,2010,18(5):550?555.
[3]崔麦会,周建军,陈超.无人机舰载应用的关键技术探讨[J].航空科学技术,2004(5):31?33.
[4]谢建东.无人直升机 GPS/INS 组合导航系统的设计与仿真[D].南京:南京航天大学,2005.
[5]杜平,张佳丽.一种舰载直升机着舰模型的建立与分析[J].舰船科学技术,2012,34(6):102?106.
[6]王文涛,张志春.直升机着舰动力学特性仿真[ J].四川兵工学报,2009,30(11):68?70.
[7]乌兰巴根,胡继忠,徐元铭.无人直升机自主着舰系统设计及仿真试验[ J].北京航空航天大学学报,2010,36(8):986?990.
[8]余勇,杨一栋.基于卡尔曼滤波理论的甲板运动预估技术研究[J].数据采集与处理,2002(4):381?384.
[9]彭秀艳,王志文,吴鑫.舰载机纵向自动着舰控制[J].智能系统学报,2011,6(2):172?177.
[10]张永花,周鑫.纵向甲板运动补偿技术研究[J].电光与控制,2012,19(4):18?22.
[11]李冀鑫,侯志强,郑小洪.舰载飞机纵向着舰自抗扰导引系统设计[J].飞行力学,2008(2):13?15+24.
[12]李冀鑫,侯志强,郑小洪,等.纵向着舰二阶自抗扰导引控制律设计[J].海军航空工程学院学报,2008(2):139?142.
作者简介:
于淼(1967—),本科,高级工程师,研究方向:新概念武器。
