校园快递机器人的设计与实现
2022-05-30计雅婷刘畅言郭诚王元茂
计雅婷 刘畅言 郭诚 王元茂
摘要:随着网络的发展,大数据、物联网、云计算等相关技术都得到广泛应用。在此背景下,人工智能产业的发展成为必然的趋势。与此同时,联动之下互联网带动了电商行业和快递服务行业的发展。快递的发展引起的一系列问题已经成为人们最关心的问题。该课题主要研究在现有的机器人技术下,制作校园快递机器人,也为解决快递行业快递服务滞后的问题。
关键词:校园快递;大学生需求;机器人;单片机;3D打印
中图分类号:TP18 文献标识码:A
文章编号:1009-3044(2022)28-0040-03
1 设计背景
21世纪的科技水平已经不可同日而语,由于人们对科技行业的不断探索与追求,科学技术发展水平全面提升,全世界的科技领域也在不断向新的领域进发,新的科技形势也在向我们挥手,这对整个世界的科学技术的发展和人类智慧的进步都产生了很大的而且深远的影响。同样,在中国,越来越多高科技产品横空出世,科学家们对自动化技术的研究让机器人的出现变得不那么难以接受。随着机器人相关的科学技术的进步,各种各样功能的机器人被创造出来以满足人们在各个领域的需求。机器人技术被普遍认为将会成为未来最具商业以及科技以及高技术之一,在计算机技术、网络通信技术、大数据、互联网等新技术发展的推动和带领下, 机器人技术也正从传统的大型工业制造领域向医疗器械、野外勘测、戶外救援、生物工程研究以及家庭服务等领域迅速扩展,所以便有更多拥有不同技术的机器人系统被科学家们进行深入的研究和开发[1]。
2019年11月19日,大家熟知的著名公司京东则在北京召开了全球科技探索者大会。在大会召开的过程中,京东集团的副总裁以及事业部总裁肖军宣布了此次会议主要是介绍最新研发设备——配送机器人4.0,他说“和以前相比,这次集团里设计研发最新设备具有跨革命的科学技术研究开拓的意义,不仅实现了从最初的设计、研发、测试到正式运用于商业的历史性跨越,同时无论是机器人相关算法的准确度或者是机器人智能识别和探测的精准率,还是各种不同配送环境的适应性以及匹配性,都得到了极大的提高”。由此可见快递机器人的市场前景是大势所趋。由此看来,快递机器人行业的发展前景是非常光明的,同时在这个机器人的开发背景下,我们也可以更好地对快递机器人展开更深入的研究[2] 。
中国国防科学技术大学已经研制开发了KDW系列双足机器人,同时也研制了仿人机器人“先行者”。清华大学研制开发了仿人机器人THBIP-I。机器人在家庭生活、户外救援、医疗器械、社会服务和交通运输等领域都有广泛的应用前景。在这些领域,机器人需要在未知、复杂、不同的环境下完成不同类型的工作任务,这就对机器人的人机交互、移动系统、避障系统以及对环境的适应性都提出了更高的要求[3]。
2 系统总体设计
2.1 移动系统
校园快递机器人使用的是常规轮式机器人,两个常规轮,一个全方向轮。两个常规轮可以进行前进和倒退,一个全方向轮可以在避障的时候快速旋转改变机器人位置。系统是以检测电磁线为基础,通过单片机处理信号实现对车体控制,实现车体能够准确沿着预设路径寻迹。系统电路部分需要包括单片机控制单元、电机驱动电路等部分,除此之外系统还需要一些外部设备,例如编码器测速、伺服器控制转向直流电机驱动车体[4]。小车的程序主要采用顺序结构,使用中断向量进行嵌套控制,通过合理安排各个任务之间的执行时间,提高程序的稳定性和效率。
机器人在道路中的转向是否及时准确以及路径汽车姿态是否良好大部分决定于舵机转向的好坏。单片机通过在道路上的位置进行电磁位置解算,计算出位置偏差和位置偏差率,继而将这两个量输入到舵机转向控制器,并储存记忆上一次的若干数据,进而输出某个PWM给舵机,让舵机打角,完成舵机在道路中的转向。总结原理如下:舵机转向线程开始从道路位置开始结算,通过计算位置偏差和计算位置偏差率反复调试,由舵机转向控制器输出PWM到舵机,至此舵机转向线程结束。
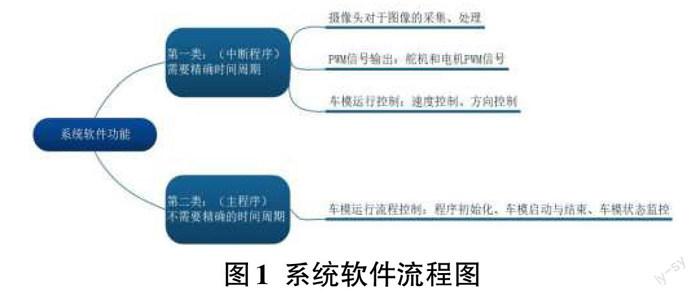
机器人的程序主要采用顺序结构,使用中断向量进行嵌套控制,通过合理安排各个任务之间的执行时间,提高程序的稳定性和效率。软件主要包括功能如图1所示。
机器人运行的基础流程:开始是各模块的初始化,接下来开启摄像头场中断,继续开启中断总开关,随后检测图像采集标志位根据标志位判断是否采集完成一帧图像,中线处理获得偏差使得PID运算舵机打角,从而获得速度偏差,通过PID运算出电机占空比回到检测图像采集标志位这步,显示参数然后返回到检测图像采集继续之前的操作直到完成任务。
2.2 电路控制系统
整个智能车系统的核心结构是由作为主流机型的8位CPU和存储器、定时计数器、中断系统、输入输出接口、总线和其他功能的器件组合在一块芯片的51单片机。51单片机的使用,让实现预期的性能指标成为可能。51单片机的芯片运行速度快,抗干扰能力强,且简单易上手。整个电路的控制系统需要解决的问题在于如何实现小车的自动控制。对于这点,单片机就拥有很强的优势——控制简单、方便、快捷。在这方面,单片机足以满足快递小车的设计需求。51单片机可靠性高、便于扩展、控制功能强、运行速度快、功耗低、体积小、抗干扰能力强、同时技术成熟且价格低廉。在单片机系统中,复位电路是必不可少的一环,因为在实验过程中出现程序不正常运行或者死机、停止运行等问题是最有可能发生的,所以要提前解决这个问题。则需要利用复位电路进行下一步操作。MCS-51系列单片机的复位引脚RST(9管脚)出现24个时钟以上的高电平,系统便立即执行复位操作。同时单片机的复位操作可以是自动复位,也可以是手动复位。这样便解决了如上问题。同时可以体现出单片机在整个电路中的重要性[5]。
2.3 路径分析系统
按路径可分为两种情况:
第一种:静态已知环境
首先收集机器人运行路段的相关数据,比如起始路径以及驿站到宿舍楼下的固定障碍物所在位置,规划出一条可以避免碰撞的路径。
第二种:动态不确定环境
对于移动中的物体,比如来往的学生教师,车辆,机器人将会进行红外扫描以及根据传感器信息不断更新周围局部障碍物分布并自动避障且重新规划路线。在重新规划路线之前,需要对驿站到宿舍楼的路段进行唯一标记,使机器人在避障后能进行最短的移动路径规划,得到最优路径。另外机器人经过扫描承载货物的高度和宽度进行路径计算,确保在行驶的过程中不碰到来往的行人和车辆。最后控制机器人行驶速度,通过计算选择适当的速度前进。
全局路径规划可以用以下两种方法:
可视顶点图法;根据障碍物的顶点建立,连接一个障碍物与另一个障碍物的顶点,最短路径即经过障碍物顶点。
自由空间法:把机器人的工作空间分为自由空间和障碍物空间。在经过障碍物附近的时候它能对两者空间的计算来保证最大允许误差,避免与障碍物相碰。
3 样机制作(3D打印技术)
本款产品是以3D建模技术为基础的一款新型产品,先通过3D建模来构思机器人,设计出其主要的器件,如电池盒、万向轮、螺柱、小车底板、马达固定板、主板、万向轮支架、万向轮连接板、超声波小板、红外小板、舵机座、舵机、马达、车轮等,然后运用3D建模命令以及具体的参数将它们组合起来进行绘制,便可以得到一个基本的模型,从而能够充当实体机器人的一个模型。主要通过一些具体的指令来进行操作,例如在绘制小车底板时,则需要先绘制出小车底板的大致轮廓,然后点击草图绘制的矩形命令,给底板进行大小轮廓的确定,然后输入相对的数值。同时对其四个角进行倒角设计,选中矩形的四条边,然后点击倒角,输入相应的值,再通过拉伸切除功能绘制一些安装孔,小车底板的设计便完成了[5]。
4 机器人存在的缺陷
本校园快递机器人基于现有技术设计出来,具有很高的实用性,但是仍然存在较多的缺陷未能改进。缺乏安全的防盗技术,在无人看管机器人的情况下可能会使得机器人和其上的快递的安全没有保障,如果有心思不轨的人破坏机器人也无法及时阻止;定位没有精确到点,目前个人的能力只能设计机器人运送快递到寝室楼下把那一栋楼的快递统一安放,没法精确到具体楼层;成本虽然不高但是损坏率很高,因使用的材料属于低成本的芯片和塑料板制作出的样板,所以难免保证不了机器人的长期使用情况,需要定期去检修;灵活性不高,机器上方的部位存放要运送的快递件,大量快递的堆积使得机器人的行动极其不便利,活动起来就无法避免灵活性不高的缺点;无法大规模普及充电桩,机器人使用的是电池补充能量的方法,校园内目前还没有普及大规模的充电桩,运行中的机器人如果半路没有电了,如何给其充电就成了一件麻烦事。
5 总结
通过对大学校园内的快递投送的问题思考与分析,缓解快递的配送难题、避免大学同学没有时间取快递的问题,以及某一时间段内取快递的人群出现人流高峰期的问题。在国内技术现有的理论基础上进行校园快递这一模块上的应用,进而研究出该校园快递机器人。通过此课题的应用,不仅可以缩短学生用在取快递上面的时间,也可以错开人群高峰,进一步提升学生的生活效率和品质。另一方面,虽然技术和理论以及实际应用上仍然存在缺陷和不足,但是基本的设计方法已经实施了,在后期的研究发展中会进一步完善这些问题。
参考文献:
[1] 王茹,牟维哲,刘敏,等.基于校园最后一公里的物流配送问题研究[J].北方经贸,2018(12):74-77.
[2] 赵珣.以客户为中心的第三方物流企业服务质量评价研究[J].商场现代化,2017(1):29-30.
[3] 李宁,范婷婷.菜鸟物流的模式及发展分析[J].現代商业,2017(4):20-21.
[4] 张宝宁,张洋.关于高校物流领和配送问题的探讨——基于沈阳师范大学高校物流最后一公里项目的研究[J].科技视界,2019(31):238-239,186.
[5] 张秋燕.关于智能快递自提柜的研究及应用分析——以亚马逊为例[J].科技广场,2014(10):141-145.
【通联编辑:光文玲】
