智能防抖叉勺的设计
2022-05-30郑平威从军浩杨冉冉
郑平威 从军浩 杨冉冉

关键词:智能防抖;重心平衡;伺服电机
智能防抖勺的主要面向帕金森患者,帕金森患者手脚麻木,四肢颤抖,手部变得不可自我控制。在我们正常人眼里十分容易的进餐,在他们面前却变得无比的困难。有因为手部的颤抖,食物经常因为抖动而从餐勺里洒出,而且随着年龄的增长患有帕金森的人数也是呈现几何倍数的增长,对于老人来说,不想给子女增添麻烦,同时对于自己来说不能独立进食也是一种自信心的打击[1]。于是我们的产品设计就是为了能够妥善的处理这个问题。我们设计的产品采用智能高速伺服控制系统,提供高精确的主动防抖功能,基于无人机姿态解算技术,带来更加稳定的控制效果,自动区别有意识和无意识的抖动,在进餐时可以有效地抵消手部震颤,但不对手就行任何的处理。在材料上我们选取医用萃特外壳不含双酚A,且耐高温;医用超薄硅胶,具有优异的抗冲击强度,抗氧化水解能力,满足一切安全无害需求。同时我们采取了全自动感应装置拿起叉勺开启,放下时休眠,极大的延长了待机时间。
1 防抖技术的现状
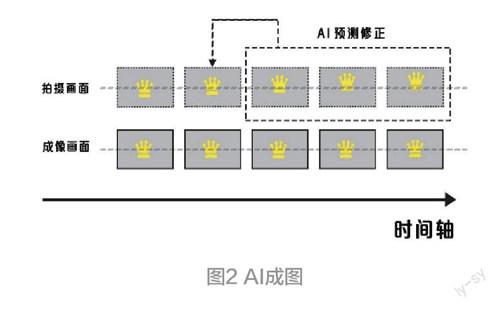
防抖技术起初用于摄影方面,现在在手机摄像上广泛应用。手机影像防抖经过三个阶段的发展,EIS(电子影像稳定,electric image stabilization)、OIS(光学影像稳定,optical image stabilization)、AIS( 智能影响稳定,AI image stabilization )。电子防抖在视频领域较为常见,即拍摄者由于自身的重心变化,导致拍摄的视频画面频繁跳动,使拍摄画质大幅度降低。EIS 技术通过无人机姿态技术,对视频画面进行自动化处理裁切无效部分,从而使视频画面变得清晰。OIS 是应用螺旋仪的原理获得的姿态变换,相较于EIS 的裁切画面,OIS取用控制镜片或者镜片组的细微移动来进行补偿[2]。随着AI 技术的发展,渐渐地也融入到防抖方面,AI 算法融合了EIS 和OIS 的优点,对相机的相对运动进行了一定性的预算,进而得到了更加平稳和准确的相机姿态,视频的画质得到了大幅度的提升,新的防抖措施带来了更好的用户体验,如图1 所示。
无论是依赖云台的的外部防抖,还是手机自身的光学防抖都采取了方向抵消的方法,这也为我们的防抖叉勺提供了思路,如图2 所示。目前我国的防抖叉勺器械基本处于空白状态,我们采取线性控制算法主动抵消手部的抖动。
2 智能防抖叉勺的模型的建立
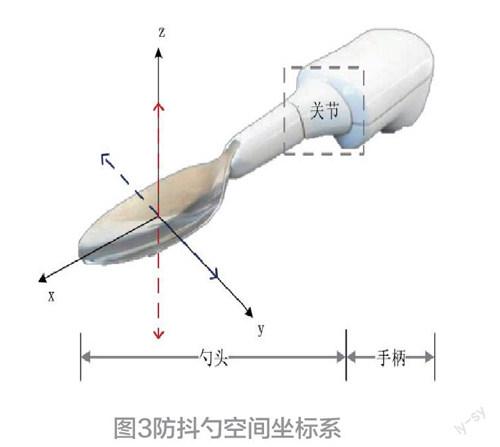
防抖叉勺采取勺柄分离设计,中间使用磁力连接,叉勺配合更加易于完成进餐。我们的智能防抖叉勺相似于关节机械臂,我们需要限制其自由度,由于其结构特征,我们不需要限制X、Y、Z 方向的移动,我们使用微型电机控制勺头在Y 方向的转动,垂直方向控制Z轴的转动X 轴的不需要限制,建模如图3 所示。
防抖叉勺属于一个动态平衡系统,使手部抖动与叉勺给予的反抖动形成一个相对抵消的状态下,与无人机姿态模式相通,利用传感系统进行反向补偿。根据牛顿第一定律可知,当物体处于受力平衡的状态下,其处于静止或者匀速直线运动。当叉勺处于相对平衡的状态,帕金森患者的进餐问题就得以解决。
3 防抖控制算法的分析
传统控制算法将传递函数的微分方程进行拉氏变换,将微积分替换成s;而状态方程就变成了微积分方程,每个状态方程都包含一个一阶微分方程,逐项相加,从而能表示多阶微分及多变量系统。通过输入量的改变引起结果的改变。通俗来说,感应器将我们的手抖浮动频率输入,云端通过拉氏变换得到反都得频率进行反向平衡。
现代控制理论思路利用状态方程进行稳定分析线性系统的状态方程:
当系统达到平衡点时,即导数为0 的状态,该点为平衡点。达到平衡点时叉勺处于平衡状态,通过输入调整方程的特征值来到达调整系统的效果,调节系统的平衡点来规范系统至理想状态。
伺服系统可以根据物体的位置、状态、方位等输出被控量能够跟随输入信号进行自动的任意的变化的控制系统。伺服电机本身具有发射脉冲的功能,伺服电机每旋转一次角度都会产生相应的脉冲,和伺服电机接受的脉冲相互呼应,从而实现精确的定位与反馈。伺服系统可以根据传感系统进行相应的变化,从而平衡叉勺在Y轴与Z 轴的转动,限制其自由度。同时采用双闭环直流调速系统,其具备动态响应迅速、抗干扰能力强的优势。众所周知闭环系统拥有良好的抗干扰性能,对反馈环的前向通道的干扰动作有一定性的削弱,保证了系统的稳定性。利用转速负反馈和PI 调节器的闭环能够在确保系统稳定性的前提下,实现无差别的变数。这在防抖的措施上可以说是一项十分契合的。在帕金森患者进行手部不自觉抖动的情况下,双闭环的抗干扰与伺服电机的配合,来实现我们叉勺的有效防抖,帮助患者完成独立的进餐。
4 模糊控制原理
模糊控制就是将数学与自动化控制融合在一起的一种现代控制技术,相较于传统的算法,不依靠精确的数学算法的推导,应用模糊变量进行模糊集合,用以模糊推理[3]。利用模糊化,确认各个输入量领域模糊子集和隶属函数,假设我们手部抖动频率在2 赫兹,属于低抖动频率。我们的模糊化技术为了确定什么是低抖动频率,接下来我们需要确定我们的抖动变量范围的规定变量范围[4]。进而给发送输出频率给后续进行方向抖动平衡。
5 材料分析
在材料选择方面,我们考虑了PC、ABS、TRITAN、PPSU、SILICA 等。
PC:具有优异性能的无定形热塑性树脂材料。它拥有良好的延展性和耐热性与尺寸稳定性,并且无毒无害可着色的材质特点。虽然硬度与金属类相比略差,但是也能够满足我们在日常生活的使用。在我们的日常生活中,酸碱盐油必不可少,此材料耐腐蚀性不佳。
ABS:拥有良好的耐酸碱的化学腐蚀性能,加工成型较为简单,力学与热学性能都是极佳,而且具有较长的使用寿命,但是ABS 材料耐候性差容易受到阳光的作用使自身变色变脆。
PPSU:一种无定形的热性塑料,具备高度的高水解稳定性,制作产品可以承受多次的蒸馏消毒,但是PPSU 在划伤后析出双酚A, 双酚A 对人体有一定性的危害,所以不予采用。
TRITAN:它的材料性质具备PC 与冲击耐用性相近,同时具备PPUS 的优点,最大的优势就是安全性,它不产生任何的双酚A 和双酚S。虽然其耐温最高在96 攝氏度,但是完全满足我们在日常生活中的要求,是我们设计材料的最优选。
SILICA:高活性的吸附性材料,除了强碱、氢氟酸外不与其他的任何物质发生反应,并且不溶于水和其他的溶剂,无毒无害。可以用于辅助材料的构成,为产品提供了保障。
6 总结
帕金森是社会中常见的运动障碍病例,并且人数伴随着社会的发展不断地上升,且大部分为老年人。患病不仅给老人本身带来了极大的不变,还给家人和社会带来经济负担和人力负担。本文主要对智能防抖叉勺的基本技术进行了浅显的分析,对智能防抖叉勺的物理模型进行建立,从产品的角度进行合理的假设和适当的简化,明确了产品设计与制造的关键点,提出双闭环控制原理。内环为控制位置让系统的跟踪误差减少,加快相应速度。外环为防抖控制,是我们产品的核心,阐述了控制原理为保持在手部抖动的情况下保证勺面与食物的相对静止,维持勺头能够处于中心位置,达到进食辅助的作用。产品的试验机上我们使用双闭环的控制算法。软件运用前后控制的构想,前台进行防抖,后台进行控制。经过实验测试可有效减少百分之七十的抖动。
