Context Capture 软件空中三角测量优化研究
2022-05-30王鑫
王鑫
(中国建筑材料与工业地质勘查中心宁夏总队,宁夏 银川 750000)
随着实景三维中国和房地一体确权项目的顺利推进,倾斜摄影测量技术再次迎来发展高峰期。目前倾斜摄影测量技术,已经被广泛用于测绘产品的制作和分析中,比如大比例尺地形图测绘、精准土方量计算、房地一体项目、城市立面街景改造项目、城市规划和地质灾害监测与模拟防范项目中等,因此倾斜摄影测量数据的准确快速解算是非常重要的。然而在实际作业之中可以发现,目前的倾斜摄影测量软件,不但作业效率低,而且空中三角测量极易出现分层、弯曲等问题,导致空三加密成果不可用,严重影响了作业进度,导致作业成本升高。为了解决空中三角测量这一问题,提升作业效率和空三解算的成功率,笔者深入分析空中三角测量的解算原理后,得知输入准确的外方位元素和相机参数,减少影像畸变,提高加密点的匹配精度,可以有效解决空中三角测量问题,提升空三的解算精度、成功率和效率[1-4]。并通过不同的项目进行对比测试,结果表明,采用本文的方法,作业效率有了提升,空三解算成功率有了提升,对于倾斜摄影作业人员来说,具有较强的借鉴意义,可以有效解决作业过程中的实际问题,降低作业成本。
1 倾斜摄影作业流程
该作业流程主要分为内外两部分,外业工作内容为倾斜影像数据的航摄、像控点的喷涂及测量工作,内业主要是对外业获取的影像数据进行解算,对控制点进行转刺,然后基于空中三角测量成果进行实景三维模型的重建和后期其它测绘产品的生产。外业影像数据获取主要包括飞机和相机选择,航线规划和航摄作业;控制点数据采集主要包括控制点布设,靶标喷涂和三维坐标测量[5]。内业工作主要有影像数据的匀光匀色、像控点的平均值求取、新建工程并加载相关数据、空中三角测量的解算、像控点的转刺及平差、实景三维模型及其4D 测绘产品的生产,其流程如图1 所示。
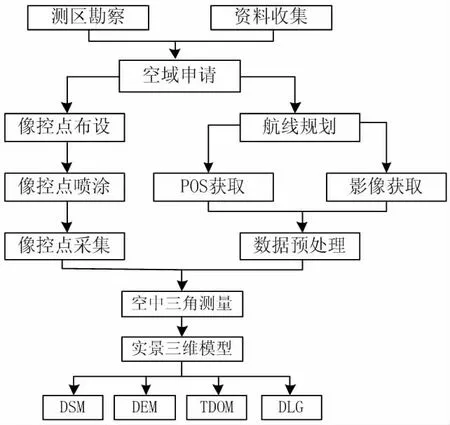
图1 倾斜摄影作业流程
2 倾斜摄影空三优化研究
通过图1 的作业流程可知,在外业方面,其所有流程都是受控的,都是人工干预进行的。内业来说,空中三角测量是软件全自动完成的,而实际作业过程中,最容易出现问题的也是该环节,因此对于空中三角测量解算来说,必须对输入的数据进行有效优化,这样得到的空三成果质量更高。而对于空三加密来说,影响其解算成果质量的因素主要有POS 数据、影像数据和相机参数[6],因此需要对输入参数进行优化,才能有效提升空中三角测量的解算成功率和效率。
2.1 优化POS 数据
优化POS 数据主要是指能够准确还原相机在拍摄时与像片之间的位置关系,这样才能在空中三角测量时进行准确匹配。目前优化POS 主要的方法有以下几种:
2.1.1 以下视镜头为基准求解侧视镜头准确的POS数据。在倾斜摄影测量中,一般都是多个相机共用下视镜头相机的POS。结合相机安装可知,采用这种方法进行作业,侧视相机的POS 精度是比较低的,并不能准确还原多个相机之间的相互关系,因此需要对侧视相机进行有效优化,这样才能保证侧视镜头POS 的精度较高。以5镜头为例,其4 个侧视镜头与下视镜头之间的相对关系和参数,可以通过平台检校参数获取,将该参数用于POS数据解算,就可以准确计算得到侧视镜头的位置和姿态数据。为了便于后期对不同组合的相机进行解算,本次利用Matlab 软件在开发POS 解算软件时,对输入的数据全部进行手动输入,然后自动解算得到每个相机每张影像的准确POS。
2.1.2 基于低精度POS 解算再进行高精度解算。空三解算失败,和POS 的精度也是有关系的,因为在平差的时候,是基于POS 数据进行的,POS 精度不一致,很容易导致平差失败。Context Capture 软件的空中三角测量算法对输入的数据要求高,对于普通的POS 数据,输入Context Capture 软件中进行空三解算,很容易失败,因此需要对输入的POS 数据进行优化。Mirauge3D 软件是一款倾斜摄影测量软件,其算法对输入数据要求不高,但是其匹配的成果精度较低,可以对POS 数据进行优化。首先将POS 数据和影像数据导入Mirauge3D 软件中,设置相关参数,完成低精度空中三角测量解算,然后导出通用交换格式的XML 文件,该文件里面记录了高精度的影像位置和姿态参数。然后将其导入Context Capture 软件中,再次进行空中三角测量解算。如图2 所示,是某一项目对POS 优化前后的空中三角测量解算结果。
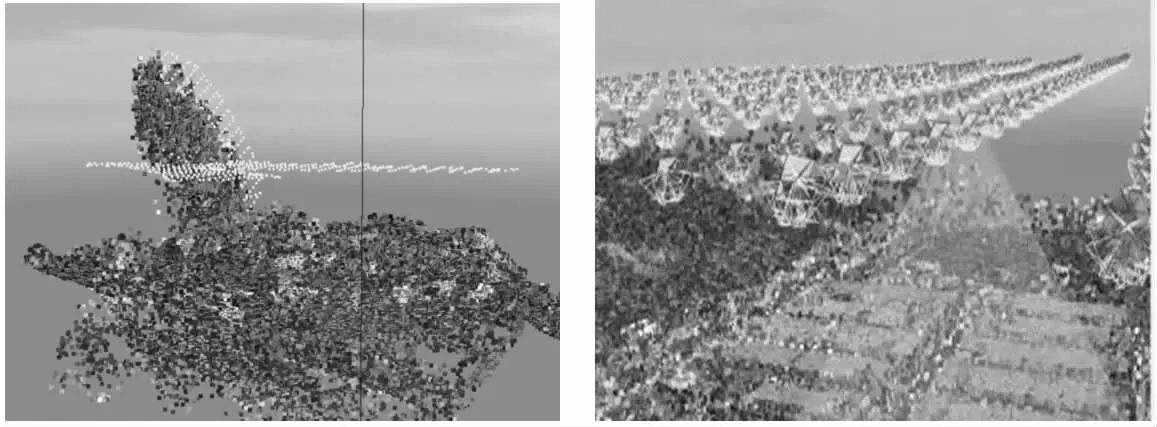
图2 POS 优化前后的空三解算结果
图2 中的左图是优化前的成果,空三解算结果分层严重,不能用于后续的三维模型生产;右图是利用Mirauge3D 软件进行第一遍空三,然后利用Context Capture 软件再次进行解算后的结果,空三呈平行状态,符合实际情况,空三成果可用。
2.1.3 基于差分定位的POS 获取。普通的倾斜摄影POS 精度,其误差在10 米之内,且精度分布不均匀,在进行倾斜空三解算时,失败率很高。差分定位也叫差分GPS定位技术,即在基准站上安置一台GPS 接收机,并对其进行观测。根据基准站已知的精密坐标值,计算得到基准站到卫星之间的距离改正数,并通过基准站将这一数据实时进行发送。用户接收机一边进行GPS 观测,一边也接收基准站发出的改正数,并利用改正数,对其观测得到的坐标值进行改正,从而提高相机在空中曝光时的定位精度。目前主流的差分技术主要包括两种,即后差分和实时差分,其都可以获得分米级别的POS 数据,且其对影像的姿态获取精度也很高,这样一来,就可以准确获取影像的位置和姿态参数,将三个外方位角元素引入软件中进行空中三角测量解算,也可以有效提升空中三角测量的精度和成功率。
2.2 优化相机参数
优化相机参数主要是指对相机的内外方位元素进行准确获取。利用检校场对影像数据进行解算,从而得到精度较高的相机参数,在传统的垂直摄影测量中很常见,但是对于倾斜相机的检校,目前能够精确检校的场所较少,加上其成本较高,因此实际作业中很少使用此方法进行相机参数检校。为了提升空三的解算精度和成功率,本文结合长期作业经验,通过少量影像得到精度较高的相机参数,然后用高精度的相机参数作为输入数据对全部影像进行解算。首先新建工程,每个镜头选择少量的照片进行倾斜数据解算,经过多次平差调整,直到相机的内方位元素趋于定值后,才停止优化。将优化后的相机参数导入软件中,对全部影像进行解算,可以有效提升空三解算的精度和成功率。
2.3 优化影像数据
2.3.1 使用蒙板技术
蒙板技术是Context Capture 软件中常用到的一种方法,其原理就是遮住影像的边缘部分,只让影像内部参与空中三角测量的解算。其原理就是影像边缘畸变严重,提取匹配的加密点误差太大,不利于后期平差调整,影像边缘参与运算,很可能会使平差失败,导致空中三角测量成果不可用。蒙板是通过黑白两色来设置的,对于不让参与空三解算的部分,将对应的影像值填充为黑色,对于需要参与解算的部分,则将影像值填充为白色。蒙板可以针对某一影像,也可以针对某一文件夹内的所有影像。如果是用于所有影像,则需要将蒙板和影像放在同一文件夹内,且命名必须为mask.tif,然后新建工程,加载影像,蒙板就会起作用,这样蒙板就设置完成了。如图3 所示,左图是应用蒙板前匹配得到的加密点,右图是应用蒙板后匹配得到的加密点。
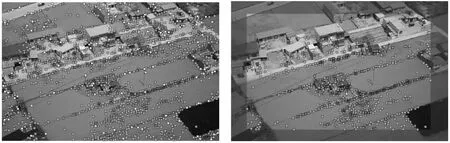
图3 蒙板应用前后匹配加密点结果
匹配得到的加密点,黄色点是精度较低的加密点,绿色点是精度较高的加密点。由图3 可知,使用蒙板后,黄色加密点明显减少,空中三角测量精度有了一定的提高。
2.3.2 影像匀光匀色
空中三角测量解算过程涉及到影像特征检测、特征提取、图像相似度计算、特征匹配和平差调整几个步骤。由于无人机像幅小,航飞高度低,因此获取的每张影像可能存在较大的色差和阴影。在特征检测中,如果影像阴影较大,则很难对其特征进行准确检测,也不能很好的完成图像相似度的计算,因此降低影像色差,提升影像对比度,提升影像的整体质量,可有助于空三解算的顺利完成。本次在对影像进行匀光匀色处理时,选用中测智绘的M3Dehaze 软件进行,首先设置输入影像路径和保存处理后的路径,然后设置处理线程和处理模式,设置gamma 参数为0.5,完成对影像的亮度调整,如图4 所示。
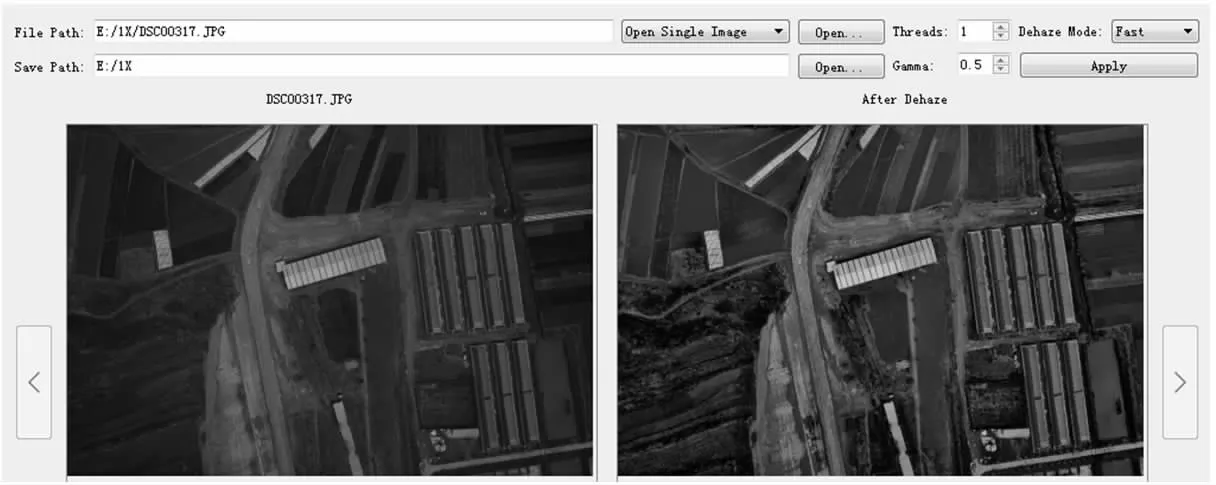
图4 基于M3Dehaze 软件进行亮度调整
对调整后的影像,选择一幅地物信息丰富,对比度明显的影像作为参考影像,然后设置输入、输出的影像路径,再次对影像进行匀光匀色处理。
3 对比分析
为了验证本文提到方案的可行性,以实际项目生产数据,对本文提到的方法进行验证,验证统计结果见表1。表中空三成果填“否”的是指空三出现分层、弯曲,填“是”的是指空三成果可直接用于建模;空三成果精度单位为像素;空三解算时长单位为小时。
通过表1 可知,对POS 数据、相机参数和影像质量进行优化,其空三解算成功率有了明显的提升,而且优化后的空三精度也有了显著的提升,空三解算所耗时间减少,有效提升了作业效率。
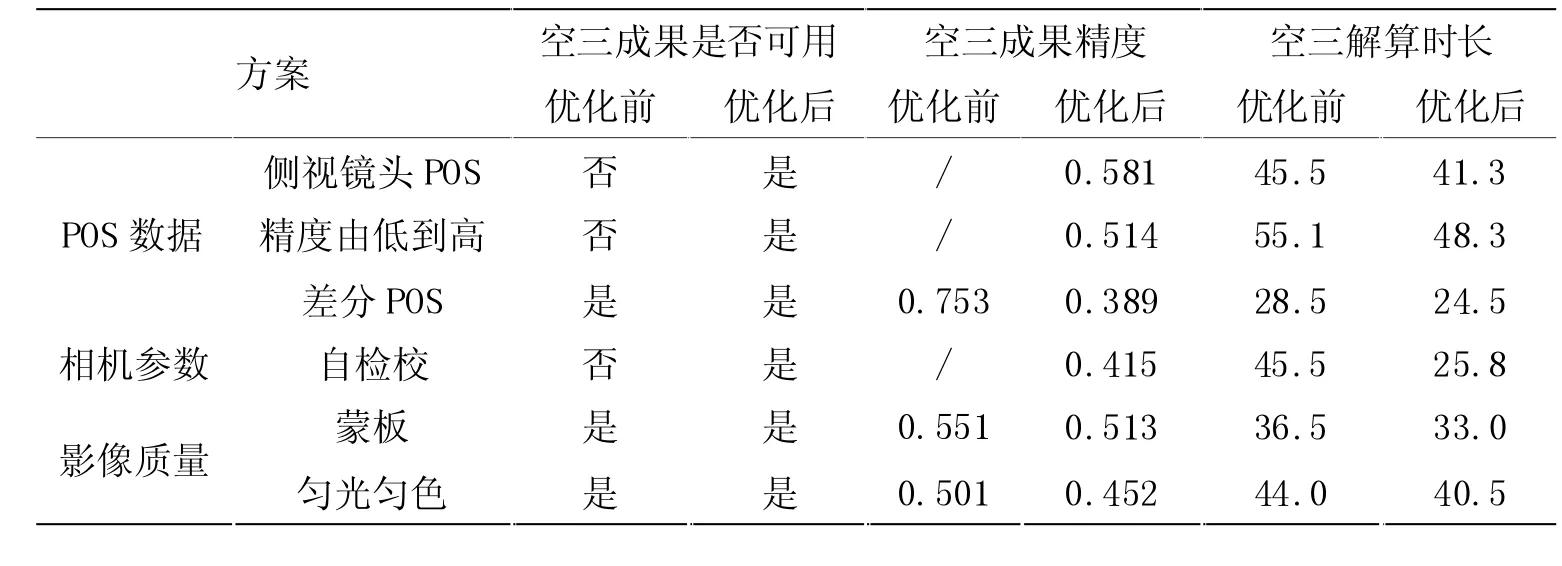
表1 不同方案优化前后对比
4 结论
本文分析了倾斜摄影测量的作业原理,得出空中三角测量解算结果取决于输入的参数。在输入的参数中,影像质量、POS 精度和相机参数准确度都对空中三角测量有一定的影响。针对输入的数据,本文提出几种可行的方案,对输入的数据进行优化,并以实际项目进行验证。通过对比分析得出本文的方案,在一定程度上,可以提升空三成果的可用性,而且作业时长可以缩短,精度也得到了有效改善,可以为倾斜摄影作业人员带来借鉴,解决倾斜摄影空三出现的分层、弯曲、精度低等问题。
