铁塔应用场景下便携式升降设备研制
2022-05-30林世忠吴维国尚文迪周立民卫晓东赵义海
林世忠,吴维国,尚文迪,梅 佳,周立民,卫晓东,李 易,赵义海
(1.安徽送变电工程有限公司,安徽 合肥 230022;2.北京国网富达科技发展有限责任公司,北京 100070)
0 引言
为保障输电线路正常运行,需对铁塔及线路进行定期维护,而特高压输电线路电压等级高,铁塔高度高,检修人员携带相应的工器具进行登塔检修作业对人员的体力消耗极大,特别是在高海拔地区,对检修人员来说是一项更严峻的挑战。
传统研究主要侧重于将检修人员和工器具一起运输至作业点,但相对工器具而言,一般人员自身重量较大,会出现设备功率大、重量大、体积大、携带不便等问题。
为有效解决检修人员上塔过程中携带的工器具等载荷运输问题,使检修人员可以轻装上塔,有更多的体力与精力专注于技术性检修作业,在铁塔的防坠落装置导轨应用基础上,研制了一种铁塔用便携式升降设备,自重轻,便携可靠,能够有效解决检修人员作业工器具的运输问题。
1 设备方案
便携式升降设备主要适用于铁塔应用场景,作为检修人员高空作业时的工器具专用运输设备,自重不大于11 kg,额定载荷30 kg,可覆盖大部分检修工器具的现场运输需求。
便携式升降设备主要包含吸附结构、传动结构、电池、控制系统等模块。
(1) 电池。采用24 V直流电池。
(2) 传动模块。主要由直流电机、减速机等组成,直流电机通过减速机驱动设备执行升降运动。
(3) 吸附模块。能够解决设备在防坠落装置导轨上的附着问题。
(4) 控制模块。主要作用是让设备拥有自身的运动系统,可以在检修人员的控制下,执行相应的高空升降作业。
便携式升降设备的吸附模块和控制模块结构及功能简要概括如下。
1.1 吸附模块
传统高空作业设备主要有真空吸附、磁力吸附及机械压紧3种吸附方式。
(1) 真空吸附方式。不受被吸附面材料的限制,但要求表面光滑,具有良好的光洁度,且吸附平面面积尽量大,以保持足够的吸附力,否则容易因吸盘漏气导致吸附力下降。
(2) 磁力吸附方式。包括永磁吸附和电磁吸附,要求被吸附面是铁磁类材料,吸附力相对真空吸附方式较大,对吸附面的不平整度要求较低,但是对吸附表面的机械摩擦破坏性较大。
(3) 机械压紧方式。采用机械预先压紧的方式,要求导轨吸附表面具有相对较好的光洁度,结构可靠,不易脱离压紧表面,结构相对简单。
防坠落装置导轨工作面尺寸相对较小,不便于采用真空吸附压紧方式。而磁力吸附对导轨工作面破坏较为明显,造成导轨维护成本提升,因此,便携式升降设备采用机械压紧方式压紧双侧导轨实现相应的运动。
便携式升降设备主体上固定有固定轮,位于防坠落装置导轨左侧;滑动杆固定在设备主体结构上,滑动杆一端设计有螺纹,对设备另一侧的连接板、移动轮等起连接作用;右侧的2个移动轮通过连接板连接,连接板可沿着滑动杆沿着左右方向滑动,进而带动移动轮左右移动,当移动轮与固定轮共同作用压紧防坠落装置导轨后,将锁紧螺母拧紧固定在锁紧位置,即可使便携式升降设备有效吸附在防坠落装置导轨上。
便携式升降设备的吸附模块结构如图1所示,相较传统吸附方式,优势明显。
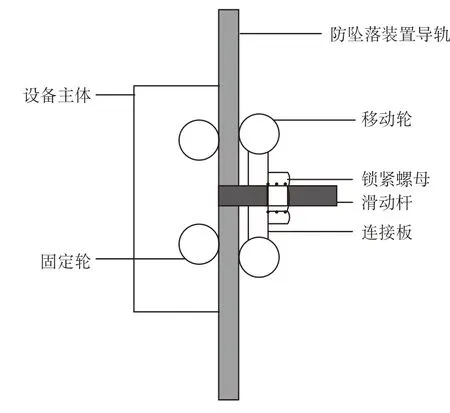
图1 便携式升降设备吸附模块构成
1.2 控制模块
便携式升降设备控制模块由遥控模块和运动控制模块组成,如图2所示。
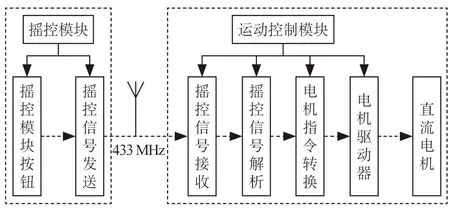
图2 设备控制模块构成
(1) 遥控模块。设有3个设备工作状态控制按钮,对应便携式升降设备的上、下、停3种工作状态。
(2) 运动控制模块。通过433 MHz频段接收遥控模块遥控信号,在模块内部通过计算对遥控信号进行解析,经电机指令转换程序,转换为设备直流电机的控制信号,输出到电机驱动器上达到控制直流电机运动的目的。
2 应用试验
为实现对便携式升降设备样机的测试验证,研究人员在试验架上固定安装试验用防坠落装置导轨,在该导轨上进行设备连续运行试验。在设备下方吊装配重载荷,采用遥控模块控制设备运动。试验表明,便携式升降设备可实现30 kg载荷连续运动,满足设备设计要求,有效解决了设备在防坠落装置导轨的吸附问题。
3 结束语
便携式升降设备作为一种创新的专业作业设备,其自重低,便于携带,检修人员单人可携带至铁塔下端开展相关运输作业,可有效协助检修人员进行登塔作业,提高检修效率,让检修人员有更多的时间专注于专业性检修作业,同时为检修人员创造了良好的作业条件。