隧道施工场景无人驾驶系统研究
2022-05-28黎胜根肖正航
向 宙,黎胜根,肖正航,崔 昌
(中国铁建重工集团股份有限公司,湖南 长沙 415100)
我国是世界上名副其实的隧道大国,其隧道施工装备正处于从跟跑、并跑到领跑的快速发展阶段。随着川藏铁路隧道等一批高风险长大隧道工程的开工建设,传统以人工为主的隧道建设方式将面临安全差、效率低、用工难等一系列挑战,隧道施工少人化、无人化已是大势所趋。同时,随着人工智能、传感器等技术的快速发展,特定区域的高度自动驾驶系统已逐步走向实用,并在城市道路、矿用卡车等场景展开实践。研发隧道施工环境无人驾驶系统,将有力推动隧道施工的少人化和无人化,提高隧道施工的安全和效率。
1 隧道施工场景分析
隧道施工场地通常为封闭场景,无人驾驶在此场景下具有一定可行性。且隧道施工作业车辆通常为低速重载车辆,这也为该场景下无人驾驶的实现提供了一定条件。然而,正在开掘施工的隧道中,通常存在着大量作业人员及机械,且隧道环境本身为狭长盲闭空间,给大型工程机械无人驾驶的实现带来了极多困难。
1.1 GPS拒止
GPS(Global Positioning System)即全球定位系统,通过接收4 颗以上卫星信息进行定位、定速和授时。该系统配合实时动态测量技术(Real Time Kinematic,RTK)可实现厘米级定位。然而GPS 信号在到达地面后功率低、穿透能力弱、易受到干扰。通常把GPS 信号接收机对GPS 信号失锁,不能正常工作称为GPS 拒止。
隧道施工通常在地下空间进行,GPS 信号一般不能透过岩层到达隧道内部,因而传统依靠GPS 对无人驾驶车辆进行定位的方案在隧道施工场景中都不能适用。
1.2 场景退化
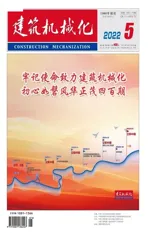
在依靠激光扫描或视觉进行定位的系统中,环境中丰富的特征是定位能够进行的前提。施工隧道通常为狭长管状结构,提取出的线面特征通常如图1 所示,会出现沿隧道方向欠约束情形,这给隧道环境无人驾驶的定位系统带来极大困难。
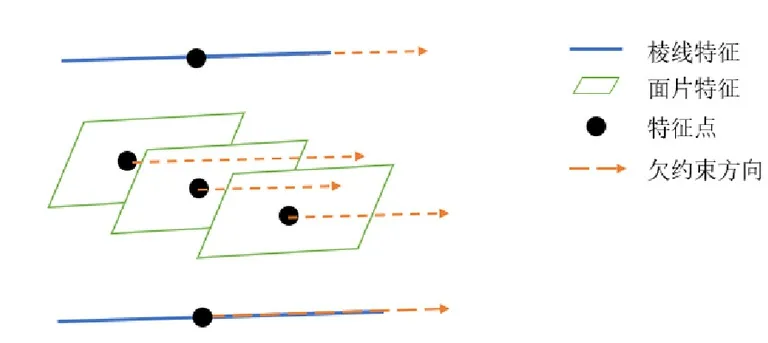
图1 隧道场景退化特征
1.3 狭小多变
隧道施工作业中,在长约300m 的管状空间中部署着超前支护、开挖、装运、初期支护、仰拱、防排水、混凝土衬砌、养护、沟槽、辅助作业等数十个工序,有着大量作业人员和施工机械,留给无人驾驶作业车的可行驶空间极小,通常需要综合行驶精度达到厘米级才能顺利通过。
随着隧道施工的进行,隧道各工序逐步向前推进,导致无人驾驶系统所面临的环境时时刻刻都在发生变化,因而行驶所需的高精度地图、定位所需的空间点云地图、特征元素标注地图等都需要进行更新,这进一步加剧了隧道施工环境无人驾驶的难度。
2 无人驾驶系统设计
针对施工隧道环境无人驾驶系统面临的GPS拒止、场景退化、空间狭小多变等新难点,本文阐述了一种隧道施工场景无人驾驶系统,设计了全新数字化线控液驱底盘,进行了无人驾驶车辆感知系统设计,开发了多传感器融合定位系统,结合隧道设计数据及施工进度提出了结构化地图更新方案。
2.1 数字线控液驱底盘
隧道施工作业车通常为低速重载车辆,常规电动执行器难以满足转向、刹车、油门等的数字控制,针对此设计了如图2 所示数字线控液驱底盘,包括线控动力、线控转向、线控刹车、线控冗余停车、线控手刹、故障检测诊断等模块。
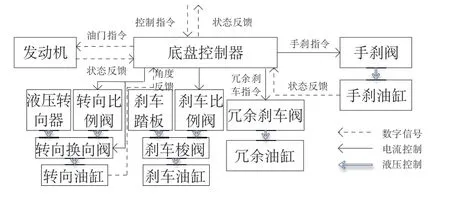
图2 数字线控液驱底盘
线控动力模块直接由底盘控制器发送指令控制发动机启停、转速及其他状态;线控手刹由控制器控制液压阀驱动手刹油缸进行动作;线控转向由控制器控制换向阀切换油路,当油路切换到液压转向器控制时由方向盘手动控制,当切换为比例阀时由比例阀输出液压油进行转向控制,同时转向油缸反馈的转向角度输回底盘控制器;刹车踏板和刹车比例阀通过梭阀对刹车油缸进行控制,两路油路可同时有效,保证驾驶室刹车踏板始终有效,增强线控底盘的安全性。为了进一步保证车辆在刹车失效等异常情况的安全性,本方案还设计了冗余的刹车系统,由控制器驱动阀体单独控制油缸进行控制。
2.2 感知系统设计
整车感知传感器部署如图3、图4 所示,各传感器数量、安装位置及作用如表1 所示。

表1 感知传感器部署清单

图3 感知系统部署(前向)
图4 感知系统部署(后向)
本文设计的感知系统选用4 台Horizon+2台PandarQT 激光雷达,为系统提供水平方向360°环境感知,同时,车体四周搭载16 台超声波雷达,丰富车辆感知信息。图5 展示了激光雷达感知范围示意。其中,Horizon 最远感知距离260m,水平视场角81.7°,垂直视场角25.1°;PandarQT 最远感知距离30m,水平视场角360°,垂直视场角104.2°。
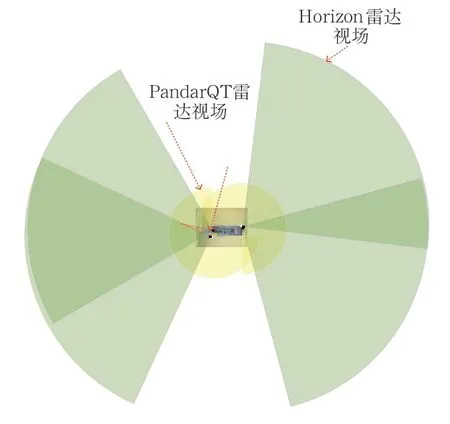
图5 激光雷达感知视场
2.3 多传感器融合定位
依靠GPS 的车辆定位系统在隧道内运用会出现GPS 拒止现象,依靠激光点云的SLAM(Simultaneous Localization and Mapping)算法通常会出现场景退化问题。为此,本文设计了如图6 所示的多传感器融合定位算法。其中室外场景采用RTK+IMU 融合的方案,隧道内部署UWB 补充激光点云的欠约束,采用误差状态卡尔曼滤波(Error-state Kalman Filter,ESKF)为融合框架,融合IMU、UWB、激光匹配、论速计信号,其中激光匹配采用正态分布变换算法(Normal Distribution Transformation,NDT),作为匹配的点云地图利用算法更新。
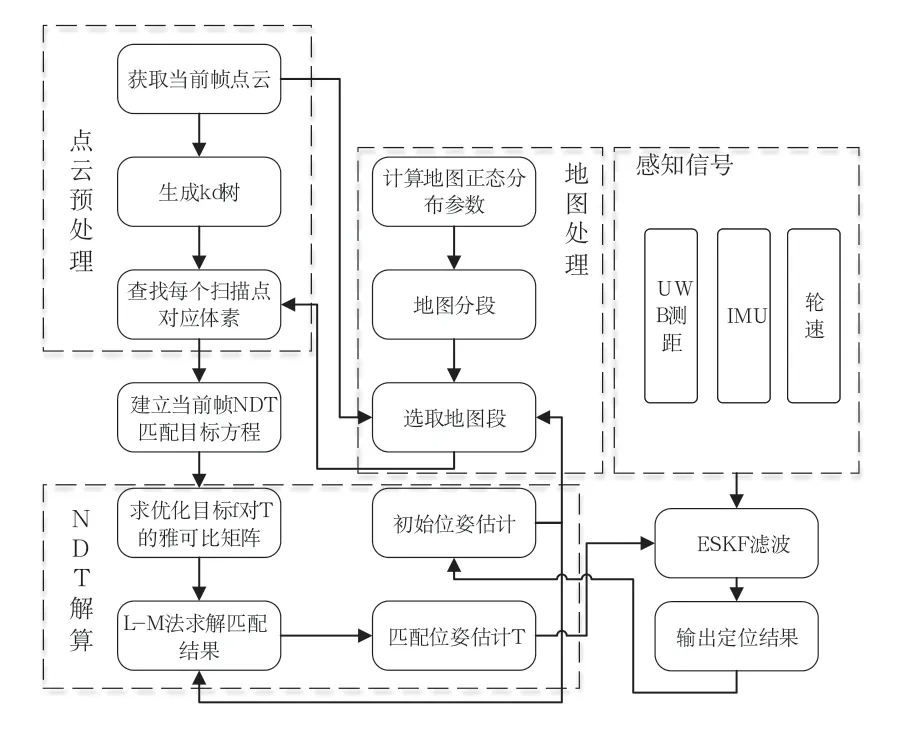
图6 多传感器融合框架
2.4 结构化地图更新
随着隧道施工的进行,隧道各工序逐步向前推进,加之为保障定位精度,本文采用了静态地图匹配作为辅助定位措施,因而需对系统中的高精度地图及定位点云地图进行更新。
利用隧道施工日志上各工序里程,结合隧道设计数据,生成各关键工序作业点坐标,与高精度地图匹配后进行更新;获取各工序里程、隧道设计数据以及预先建模好的各工序点云,进行坐标转换后拼接进而更新点云地图(图7)。
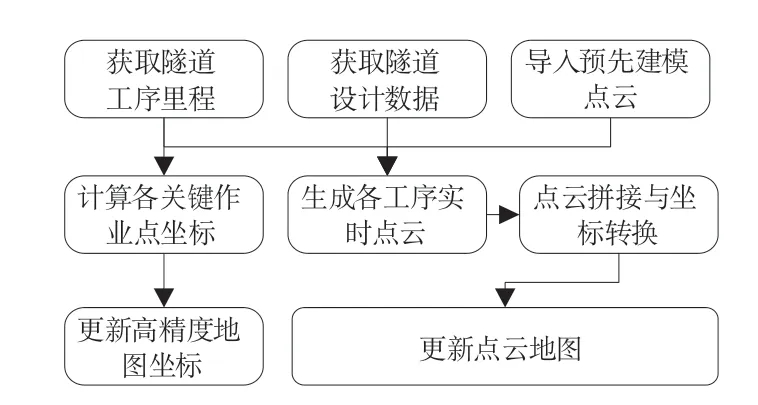
图7 结构化地图更新
3 无人驾驶实验结果
3.1 模拟隧道场景
在空旷场地构建了如图8 所示模拟隧道施工场景,建立点云地图如图9 所示。利用本文设计的自动驾驶系统在完全不接入GPS 的情况下可在此场景完成无人驾驶,行驶时控制界面如图10 所示。

图8 模拟隧道场地示意图
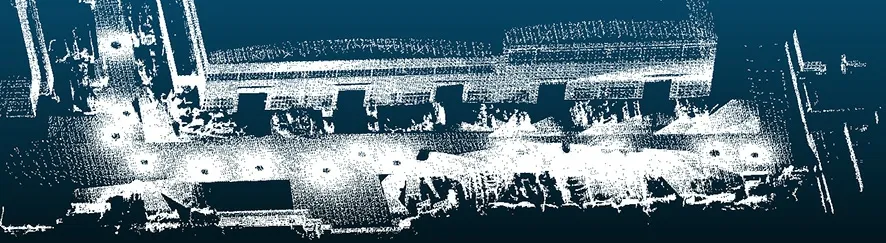
图9 模拟隧道点云地图

图10 无人驾驶控制界面
对比了模拟隧道环境车辆定位输出(完全不接入GPS)和GPS 输出,10 次测试统计结果如表2 所示,结果表明本文设计的多传感器融合定位算法在不接入GPS 情况下在含直线、小转弯、大转弯的路段综合定位精度可到达8cm。

表2 对比多传感器融合定位(无GPS)与GPS误差 (单位cm)
3.2 工程实验场景
在郑万高铁宜兴联络线高铁某隧道进口,用搭载本无人驾驶系统的湿喷机进行工程实验,建立结构化点云地图(图11),工程实验通过栈桥如图12 所示。

图11 结构化隧道地图

图12 无人驾驶通过栈桥
工程实验中,本文设计的结构化地图更新策略可适应各工序推进的情形,搭载本文无人驾驶系统的湿喷机可顺利实现无人进出场。整体而言,该无人驾驶系统工程实验取得较好效果。
4 结语
针对隧道施工场景下无人驾驶系统面临的GPS 拒止、高退化、狭小多变等难点,设计了数字化线控底盘、传感器感知系统、多传感器融合定位系统、结构化地图更新系统,并用搭载该系统的隧道湿喷机进行工程实验,结果表明该系统可基本实现隧道施工场景隧道作业车的无人驾驶。本文设计的无人驾驶系统可为隧道全工序无人化以及隧道智能建造提供一定借鉴意义。