高速旋转相控阵雷达基于资源预规划的任务调度算法
2022-05-28李纪三
李纪三,刘 溶,张 宁
(南京船舶雷达研究所 南京 210006)
多功能相控阵雷达已成为舰载配置雷达的主要趋势。相控阵雷达在反应时间、抗干扰性能、同时多任务工作等方面的优势可以很好地满足舰艇探测系统的需求,使用一部两维旋转多功能雷达代替多部单一功能的雷达,在保证功能性和经济性的同时,也解决了电磁兼容问题和舰体隐身问题,这将成为舰船雷达配置的主要发展方向。与固定相控阵相比,二维旋转相控阵以其经济性和适装性,已经成为当今舰载雷达的发展方向之一,如法国泰勒斯公司的Herakles 雷达的和英国的Sampson 多功能海用雷达均采用此技术体制。
旋转相控阵方位上机械旋转的同时,方位和仰角上均能够电扫,为实现搜索和跟踪的高数据率,要求天线面阵高速旋转,转速最高可达60 rpm。高速旋转相控阵雷达要在一个天线周期内的时间内完成360°全空域范围内的警戒、跟踪、制导等任务,实现同时多功能多任务,就必须对时间资源进行有效管理与合理分配,以提高雷达的探测效能[1-3]。针对相控阵雷达资源调度,国内外学者开展了广泛研究,主要集中在以下3 个方面。1) 搜索资源的优化:通过波位编排和波位规划,在不漏空域的情况下减少波位数,以及区域威胁度评估对于低威胁度降低搜索数据率,减少搜索使用的资源[4-6];2) 跟踪资源的优化:根据目标机动判决或者威胁度评估,在保持跟踪稳定性和精度的条件下,自适应调整跟踪的数据率,使得跟踪时间资源最少[7-10];3) 任务冲突调度:多任务竞争同一时间资源时任务负载饱和,在时间窗和优先级约束下,根据调度策略平衡任务请求,选择高优先级的任务执行,或采用脉冲交替调度提高时间资源利用率[11-15]。任务冲突调度主要包含研究时间窗的动态变化,优先级设计准则和任务调度算法。任务调度算法主要有模版法和基于时间指针的自适应调度算法,模板法实现简单但时间利用率低,在跟踪雷达中应用有优势,但在多功能雷达中不适合,多功能雷达主要适合自适应调度算法,时间指针算法时间利用率高,任务执行偏移率也高,时间利用率也相对较低。
以上关于任务冲突调度的研究成果存在如下问题:任务冲突调度借鉴了计算机任务调度的思想,因此仿真和算法设计上,将雷达任务建模成同计算机的任务请求,但为了提高和优化调度性能还需要考虑雷达任务特点和限制。
传统的基于时间指针算法应用在固定面阵相控阵雷达中,取得了较好的效果,获得广泛的研究和关注,但是在高速旋转相控阵雷达的任务调度应用中,国内外研究较少。本文在传统的时间指针算法基础上,提出一种资源预分配时间后优化的调度算法,能够在保证时间资源利用率的基础上,显著降低任务时间资源的偏移率,提高了旋转相控阵的探测效能。
1 旋转相控阵雷达特点
1.1 资源调度
旋转相控阵雷达在方位上进行机械匀速转动的同时,方位和仰角匀进行电扫,相对于固定面阵在进行旋转相控阵雷达的资源调度时应注意以下几点[16]。
1) 任务有执行的时间窗,时间窗对应天线转过时能够照到目标的时间,若不能在时间窗内执行,则任务在本圈内无法完成,只有等到下个周期天线转到该方向附近时执行;
2) 任务在天线的法线附近执行需要的时间能量最少,且探测的精度也最高;
3) 天线转速不均匀会引起波束偏移法线方向,即电子波束与伺服方位的不同步;
4) 对于突发任务(回扫确认)的响应要及时。
1.2 雷达偏扫引起性能下降


图1 天线相扫示意图

对于TAS 精跟任务,调度过程中通常采用时间窗调度策略,即任务并非在期望时刻执行,精跟任务除了偏扫的功率下降外,还存在天线波束形状损失。
天线波束扫过目标时收到的回波信号振幅按照天线波束形状调制,收到的回波能量比最大的增益的能量小,天线波束的方向图为[17]:

单程天线的功率方向图可以用高斯函数近似:

2 任务调度策略
由以上分析可以看出,相较于固定面阵,高速旋转相控阵雷达对任务执行的时间偏移率要求高。
2.1 资源规划
资源规划的目的是当某个扇区任务饱和时,通过资源规划将该扇区的任务调剂到相邻扇区,提高任务调度成功率和时间利用率。调度间隔对应的任务负载量标注为3 种状态:任务请求时间小于扇区资源90%时为负载空余,90%~110%为任务满载,大于110%为任务饱和。负载空余可接收相邻扇区的调剂任务,任务满载时不接收也不输出,任务饱和时可向邻扇区调剂任务。如图2所示,扇区3 为负载空余,扇区4 为任务饱和,扇区5 为任务满载,通过任务规划可把扇区4 的任务调剂到扇区3 执行。规划后的扇区负载状态如图3 所示。

图2 资源规划前扇区状态
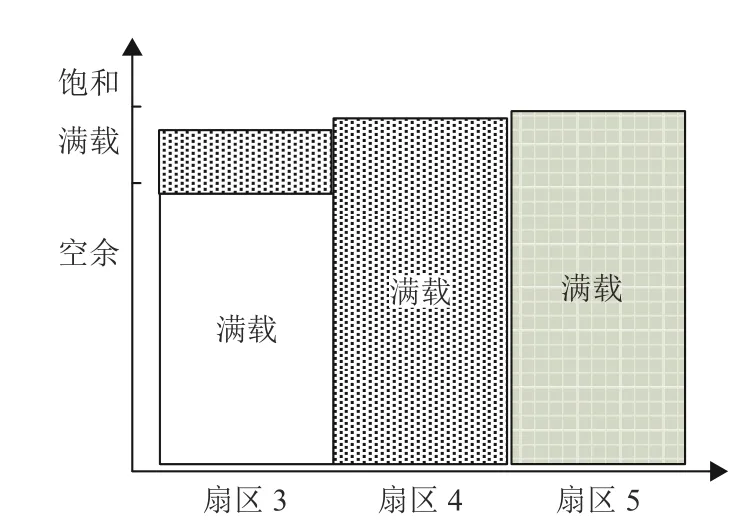
图3 资源规划后扇区状态
2.2 任务调度
任务调度是任务规划后对调度间隔内的任务请求确定是否执行以及执行的时刻,本算法在基于时间指针调度算法基础上,提出一种改进算法,如图4所示。首先按优先级进行第一次排序,根据本扇区的时间资源限制,优先选择优先级高的任务到执行队列;之后,在优先级任务执行队列的基础上,根据任务本身的期望发射时间进行排序,保证任务执行的时间偏移量最小,形成最终任务执行列表。这样,通过优先级排序保证了高优先级任务优先执行,通过对执行队列期望发射时间的排序最大程度地减少任务执行时间的偏移率。

图4 任务调度流程图
假设调度间隔为tinterval,调度间隔通常与跟踪要求的最高数据率有关[10],通常设置为50 ms 或100 ms,过程如下。
1) 在时间上按照tinterval为一个分配单元,接收各种工作模式的任务申请,形成待调度的申请任务队列;
2) 从申请任务队列中把期望执行时间在下一个调度间隔内的所有任务取出,并计算综合优先级;
3) 累加所有取出任务执行需要的时间;
4) 若时间和小于tinterval,则把任务按照期望发射时间排序后,形成执行队列;
5) 若时间和大于tinterval,则按照优先级队列顺序,取出每个任务并累加时间,当大于等于tinterval时,把累加的任务按照期望发射时间排序后形成执行队列;
6) 按照任务的期望发射时间排序后,根据完成任务需要的驻留时间,把上个任务的结束时刻作为下个任务的执行时刻,对每个任务的执行时刻进行重新赋值,保证时间的最大利用率。
2.3 计算复杂度分析
任务调度的本质是选择出要执行的任务,并确定任务执行的时刻以及任务消耗的时间资源。因此任务调度有两种技术路线:1) 时间选任务,即当下时刻选择出任务优先级最高的任务执行,当该任务执行完毕后,时间指针到达任务的结束时刻,继续选择优先级最高的任务,也就是时间指针算法;2) 任务选时间,在一个调度间隔内,最高优先级的任务按照期望执行时刻选择时间段,低优先级的任务在其时间窗的约束内左右移动,选择出可以执行的任务时间空隙,该过程称为自适应调度算法。时间指针算法要经过一个优先级排序算法,按照最高优先级安排任务,算法相对简单,但任务执行偏移率高。自适应算法,俗称插空法,任务执行偏移率低,但是每个任务在调度时要在时间窗的约束下左右移动,然后判断该任务结束时刻是否已经被别的任务占用,随着任务调度的越多,时间碎片越多,调度的计算量也线性增大。而本算法通过之前的任务调度流程图可以看出,算法的核心为两次排序,先按照优先级排序选任务,然后按照任务期望执行时刻排序,形成调度队列,具有算法实现简单和计算量小的优点。
3 仿真实验
3.1 任务模型

3.2 调度性能评估指标
任务调度成功率为:

式中,N为成功调度的任务总数;M为所有请求的任务总数[19]。
时间利用率为:


相控阵雷达任务主要有搜索和跟踪两大类。当雷达的搜索区内没有目标时,所有时间用来搜索,因此搜索任务的产生在各个方式上是相同的,期望执行时间也是均匀分布在雷达整个的天线周期内;而跟踪任务与目标的位置有关,因此期望执行时刻是随机的。搜索任务分为4 类,如图5 所示:高优先级搜索1(HS1)、高优先级搜索2(HS2)、低优先级搜索1(LS1)、低优先级搜索2(LS2)。跟踪任务分为3 类:近程确认(NC)、近程精跟(NT)、中远程精跟(FT)任务[20-21]。全区域有120 个方位波位,一个周期内共有40 个调度间隔,每个调度间隔内要完成3 个方位波位的搜索任务,假设搜索占用的时间资源最高为80%,每个调度间隔剩余10 ms 的剩余时间。每个方位波位上有4 个任务,则整圈有120×4=480 个搜索任务。

图5 搜索任务示意图
工作参数的设置主要参考文献[13-15],设定的工作参数在实际工程中未必全部合理,但不影响调度算法的验证,搜索和跟踪任务的优先级设置如表1 所示。

表1 任务优先级及时间窗
场景1:每个调度间隔随机产生1 个跟踪类请求,全周期共产生40 个跟踪任务,如图6 所示。搜索任务请求落在时间[200, 300],如图7 所示。将本天线周期的任务期望时刻均匀产生,每个任务的期望执行时刻为天线法线转到该任务所在方位的时刻,即如果搜索任务按照期望时刻执行,其天线增益最大,信噪比最高。

图6 场景1 目标态势

图7 场景1 任务请求
时间指针调度结果和本文调度结果如图8 和图9 所示。通过对比可以看出,本文调度算法的执行与任务请求时的顺序相同,而时间指针算法的任务执行顺序按照优先级执行,而通常搜索希望按照方位从小到大,仰角从低到高的顺序执行,便于后端的点迹凝聚和视频显示。调度性能评估如表2 所示,两种算法的时间利用率和价值实现率基本相当,任务执行偏移率本文算法优于时间指针算法,时间指针算法的时间偏移率为0.157,相对于100 ms的时间窗,偏移了15.7 ms,天线法线偏扫2°~3°,也满足任务需求,没有产生明显性能下降。

图8 场景1 时间指针调度结果

图9 场景1 本文算法调度结果

表2 场景1 调度性能评估结果
场景2:如图10 空域内有120 个目标,每个调度间隔对应的方位9°内有3 个跟踪请求,跟踪请求时间资源为6~15 ms。搜索的时间资源为45 ms。调度性能评估结果如表3 所示。时间指针算法时间偏移率达到了0.447,对应的搜索的时间窗100 ms,则任务执行偏移了9°左右,已不能满足搜索的要求,而本文算法任务偏移率只有时间指针算法的十分之一。

表3 场景2 调度性能评估结果

图10 场景2 目标态势
场景3:如图11 和图12 所示,在第6 个调度间隔(对应调度起始为250~300 ms,搜索的方位为48°~54°)产生9 个跟踪任务请求,任务的驻留时间由目标的距离决定。
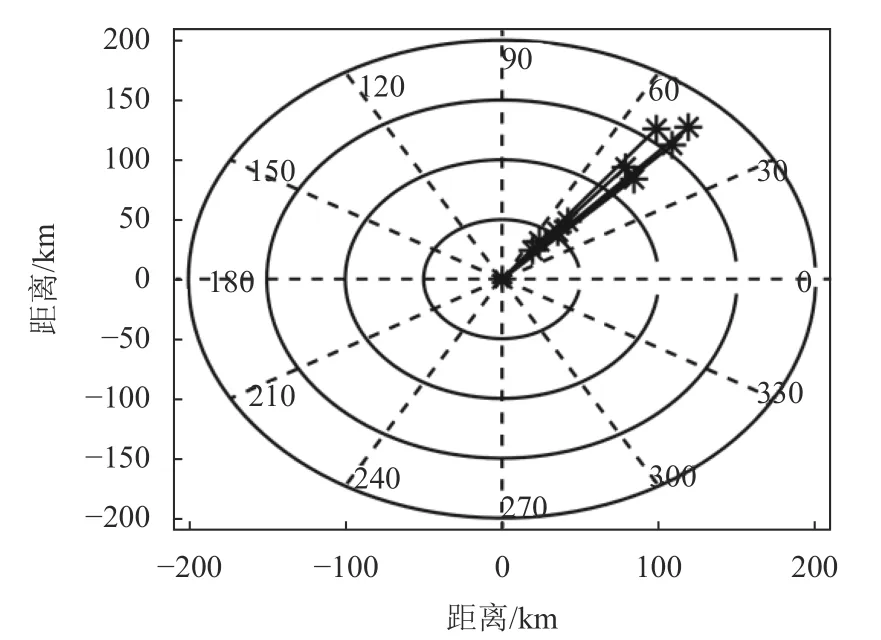
图11 场景3 目标态势

图12 场景3 任务请求
时间指针调度算法调度结果如图13 所示,按照跟踪任务和搜索任务优先级从高到低形成执行列表,虽然本调度间隔任务饱和,但是在上一个调度间隔的结束前245~250 ms 时间空闲,没有任务安排,这是时间指针固有的缺陷,即不能预测下个调度间隔的任务饱和情况并作相应的分担措施,任务按照优先级执行,最高优先级的任务在调度间隔开始时执行,但是最高级的任务的期望发射时刻和可能在调度间隔的尾部,所以会造成时间执行的偏移率过大。

图13 场景3 时间指针调度结果
本文算法首先对资源进行规划和调配,调度间隔9 个任务请求任务资源达到饱和状态,而左右两个调度间隔的时间资源为负载正常状态,可接受相邻扇区的任务请求,通过任务规划将其中4 个任务调配到第7 个扇区,1 个任务调配到第5 扇区,最终执行结果如图14 所示,调配到第5 个扇区的任务在扇区的调度间隔尾部执行,而调配到第7 个扇区的任务在调度间隔的头部执行,调配任务的执行时刻与期望执行时刻相差不大。在任务调配过程中,首先对任务按照期望执行时刻进行排序,找到本饱和扇区头尾的任务,头部任务调配到上个扇区的尾部,尾部任务调配到下个扇区的头部。通过任务调配,还能够保证本扇区有一定的资源进行搜索,通常来袭目标多的扇区也是最有威胁的区域,更要保证最低限度的搜索。当然时间指针算法也可以通过调整搜索任务的优先级来保证本扇区的搜索,但是时间指针算法没有资源的预规划,时间利用率和任务调度成功率会降低,特别是在任务时间窗小于调度间隔的情况下,本调度间隔没有编排,到下个调度间隔时则已超过任务时间窗。

图14 场景3 本算法调度结果
调度性能指标对比结果如表4 所示,计算了饱和扇区以及左右两个扇区,共3 个扇区的平均值,本文算法在价值实现率和时间偏移率上均优于时间指针算法。两种算法的消耗时间如图15 所示,本文算法在饱和扇区的调度时间消耗与非饱和扇区的时间消耗差不多,而时间指针算法的在饱和扇区时间消耗明显增多。

表4 场景3 调度性能评估结果
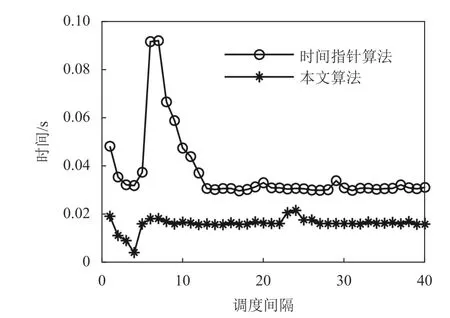
图15 场景3 计算耗时对比
4 结 束 语
针对高速旋转相控阵雷达任务调度问题,本文提出一种资源预规划、任务双排序的波束编排算法。本算法相对于传统的时间指针算法,在任务不饱和情况下的性能相当,在扇区任务饱和情况下的资源利用率比时间指针算法稍高,任务执行时刻偏移率却只有时间指针的十分之一左右,且本算法计算量小,工程实现简单。仿真和实践证明了本算法的有效性。
