基于卫星定位与GPRS 技术的检测系统设计
2022-05-26张洪厉谢文娣
张洪厉,谢文娣
(安徽新华学院电子工程学院,安徽合肥,230088)
0 引言
随着无人汽车,无人机等新兴科技产品的出现,未来将会被大规模的生产及使用,对于规模化无人智能产品的监管及其位置信息等大数据的采集与分析显得尤为重要。如处于沙漠和大海航行时,地理坐标无法通过蜂窝网络进行定位,需要依靠卫星定位,实时获取和更新数据,因此研究基于卫星定位技术的实时监控和数据采集等问题将具有很好的现实意义;同时对于运动的物体,显示的数据刷新率需要达到10Hz,为解决以上问题,本文设计一款可为使用者提供良好无线传感网络的运动载体实时监控系统。为提高系统的综合性能,本文采用基于GPS、GLONASS 和北斗卫星系统三合一进行设计,同时利用云端服务器和手机采集并存储数据。
1 方案设计
本系统设计了太阳能稳压电源供电,不仅提高续航能力,而且低碳环保;并通过蓝牙模块与终端手机Laptimer APP 连接,实现信息数据的可视化管理;采用卫星定位模块,实时显示当前的位置信息,即当前位置的经纬度、海拔高度和精度,并且坐标误差不能超过十米,能够实时显示当前的采样时间,做到实时定位,永不迷失。可通过APP 程序调用手机摄像头,将时间、位置、速度等用户感兴趣的数据标注在视频中,完成系统的实时记录。卫星定位模块最多可以支持12 颗卫星进行定位,监测到的地理信息更精确。可连接到Android 和IOS 两种系统,并显示所收集到的数据。卫星定位模块能随时监测移动目标位置信息,并将信息通过GPRS 模块传输到云端服务器,以实现数据的储存和记录。设计方框图如图1 所示。
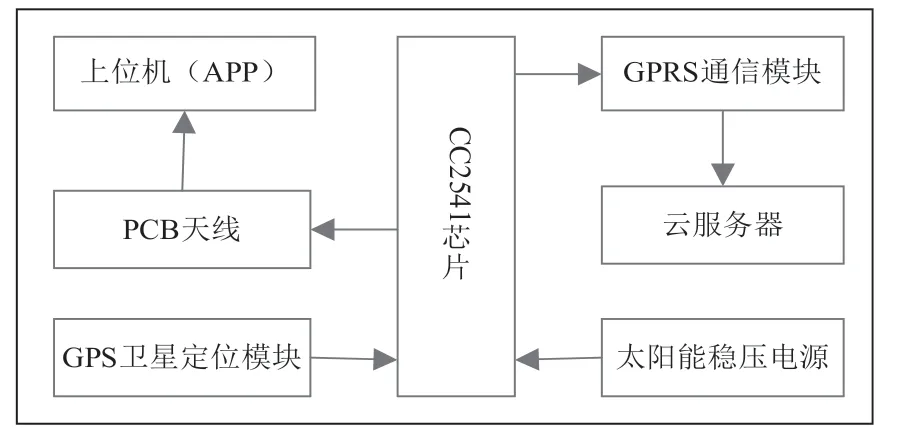
图1 系统设计方框图
2 系统硬件设计
本监控系统主要由卫星定位模块、蓝牙模块、GPRS 通信模块以及电源稳压模块组成。卫星定位模块采用ZOEM8Q 芯片,支持GPS 和北斗双模输出,利用卫星定位当前位置和确定当前时间实现数据采集。数据传输则依赖于以CC2541 为核心的蓝牙模块CC2541EMV2.6,该模块稳定性好且传输距离远,它可将无人车定位等数据实时传送到手机APP 上显示。GPRS 通信模块采用SIM900A 模块,可实时上传经纬度、海拔高、速度、日期、时间信息至云服务器,实现远程监测。电源模块采用3.7V 的锂电池,并辅以太阳能稳压充电,达到低碳环保的目的。
■2.1 蓝牙CC2541 和GPRS 通信模块设计
GPRS 通信芯片采用SMT 封装形式,性能稳定,外观精巧,性价比高的SIMCom 公司新型双频GSM/GPRS 模块的紧凑型产品—SIM900A,并且它完全可以满足用户的各种需求。当模块掉线时,系统会尝试断线自动重连的功能该模块采用3.3V 供电,使用32.768K 晶振,通过PCB天线,连接到手机,有效传输距离10 米,并且预留SMA天线接口,增加有效信号传输距离,通过USB 接口可方便进行程序下载和调试。VCC_MCU 为3.3V 供电,VCC 4 采用5V 供电,绿色标注的的四根引脚SIMVCC、SIMDATE、SIMCLK 和SIMRST 接入普通SIM 卡的芯片上,实现网络ID 身份功能;TTL 匹配电路可有效实现数据串口传输功能,可接入CC2541 的TXD 和RXD 上用于芯片之间的有线通信;D5 LED 为电话和短信的信号指示灯,D6 LED 为电源指示灯,外接天线位于RF 引脚上。SIM900A 电路如图2 所示。CC2541 将增强型8051 微处理器、系统内可编程的闪存存储器、先进的RF 收发器、8-KB 随机存取存储器、其它功能强大的特性和外设组合在一起,是一款真正片载系统(SoC)解决方案,主要针对低能耗以及私有2.4-GHz 应用的功率优化,非常适合应用于需要超低能耗的系统。
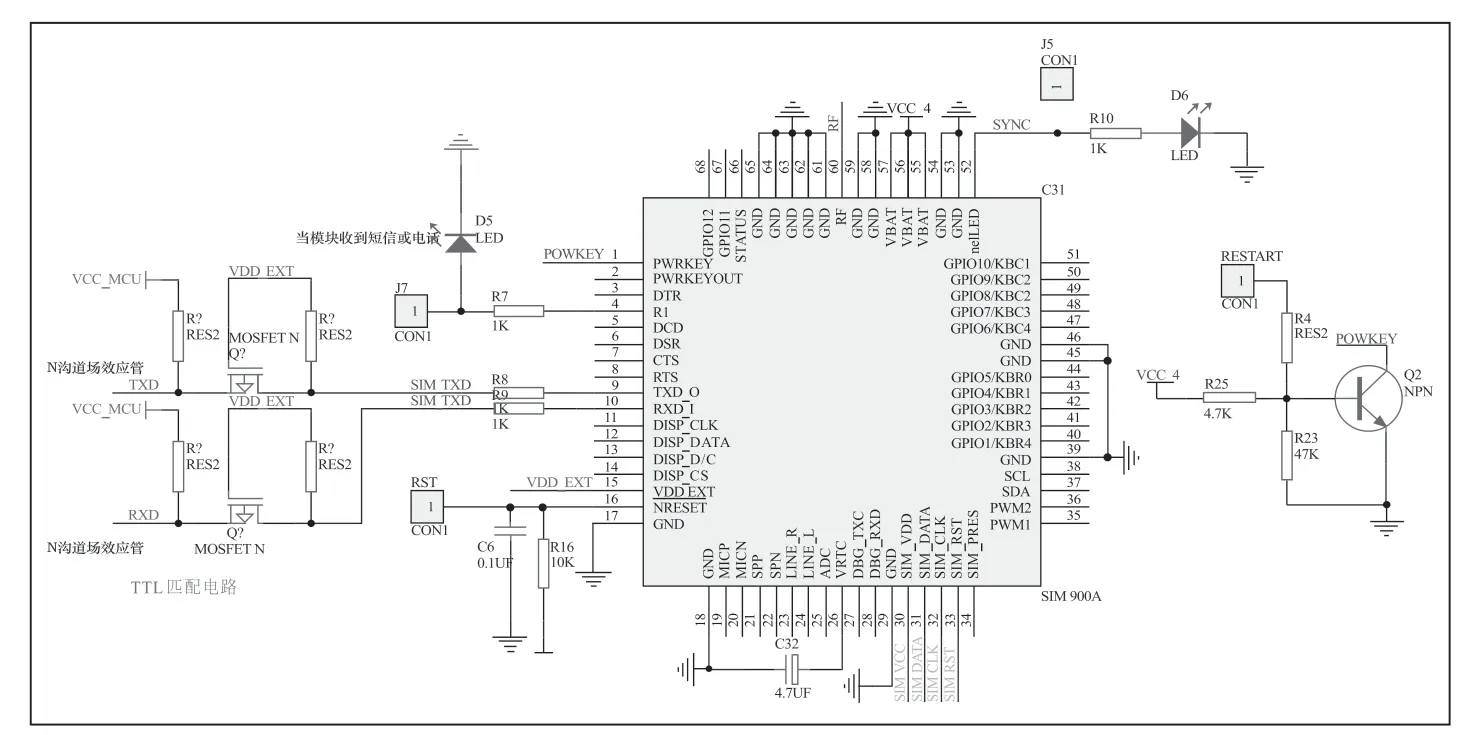
图2 SIM900A 电路图
■2.2 卫星定位模块设计
卫星定位芯片选用u-blox UBX-ZOE-M8Q,它可并发接收GPS/QZSS、GLONASS、北斗,可提供先进算法和完整的GNSS 解决方案;它还为可选的外部闪存提供SQI 接口,以用来允许未来固件升级或者提高A-GNSS 的性能,能够支持消息完整性保护、抗干扰和防欺骗,在困难的环境条件和安全攻击场景中提供可靠的定位,从而满足多用途工业和消费者应用中最严格的要求,如无人机、车辆和资产跟踪。卫星定位模块电路图如图3 所示。其主要电池供电为3.3V,备用电池在1.4V~3.6V 之间供电,J8 和J7 引脚外接晶振32.768 kHz,A4 引脚可外接陶瓷天线,J5 和J4 为串口引脚可与CC2541 连接进行芯片之间的数据通信。U-blox ZOE-M8Q 的硬件引脚名称定义如图4 所示,橙色为外接天线引脚,深蓝色接GND 粉红色是电源引脚,黄色为通信接口,深绿色外接晶振,青色是数字型I/O口,绿色为SQI 口,白色为预留口必须保持打开状态。
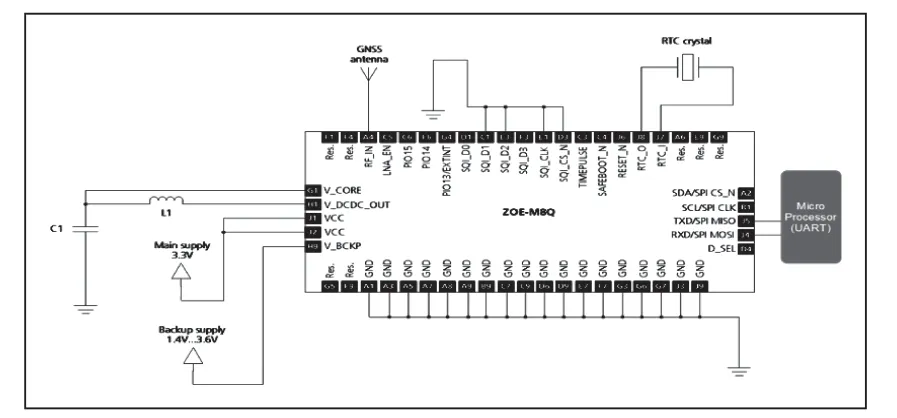
图3 ZOE—M8Q 电路图
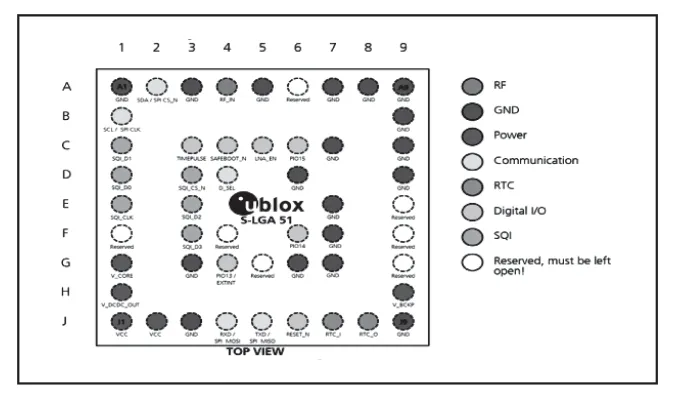
图4 ZOE—M8Q 引脚分配
■2.3 稳压模块设计
太阳能稳压采用MAX856 芯片,可输入0.8V 至12V 电压,选择输出3.3V(125mA)或者5V(100mA),还可对电池电量进行低电量检测保护。电池充电稳压电路采用TOP4056芯片进行设计,输入5V 电压,配备红色充电指示灯和绿色充满电指示灯,Bat+接电池正极,Bat-接电池负极,具体电路如图5 和6 所示。
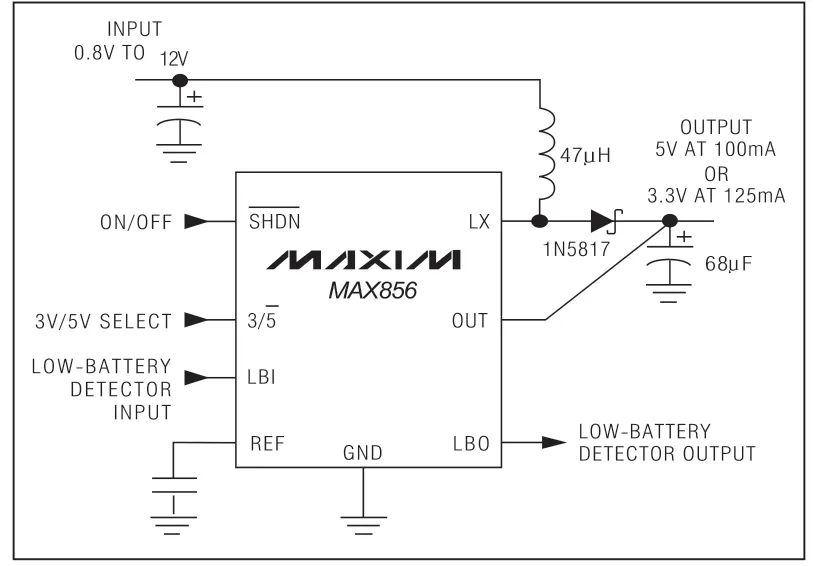
图5 太阳能稳压电路输出图
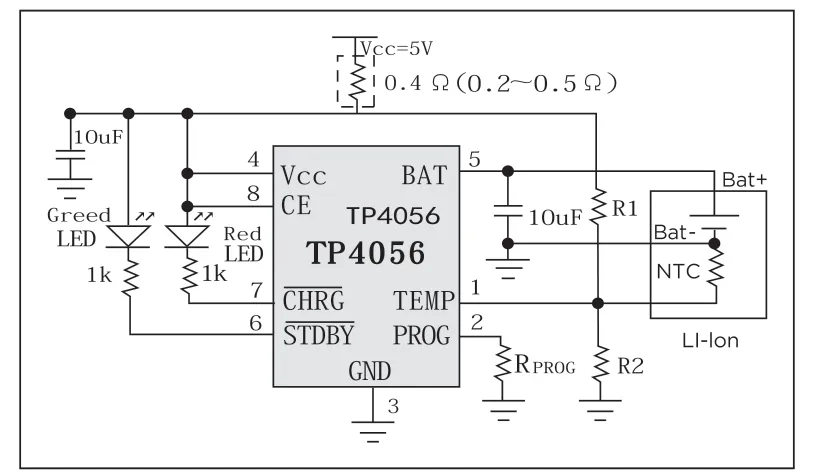
图6 锂电池充电电路稳压图
太阳能稳压模块指示灯,当接收到来自太阳能电池板转化过来的能量后,该红色指示灯常亮;卫星定位模块电源指示灯蓝色常亮,未定位情况下红色指示灯100ms 闪烁一次,搜索到卫星成功定位情况下红色指示灯5s 闪烁一次;锂电池充电模块指示灯未充满电红灯常亮,充满电时绿灯常亮;GPRS 模块红色一号电池指示灯常亮,无信号时红色二号指示灯常亮,有信号时1s 闪烁一次。蓝牙彩色指示灯未连接时常亮变色,连接时蓝色闪烁每秒一次。太阳能板模块使用单晶硅材质制作,工作电压为6V,额定功率为6W,尺寸小巧,质量轻薄,方便携带,外观如图7 所示。
图7 太阳能电池板
3 软件总体设计与系统调试
卫星定位模块将采集到的数据包括经纬度、高程、时间、精度等传送给CC2541,CC2541 将接收到的数据进行处理后并压缩,通过蓝牙协议传送给用户手机上的APP Laptimer,利用Lua 语言自主编写APP 脚本将接收到的数据进行解压和存储,并提供给显示界面,显示用户可读的数据;并通过串口将数据传送给SIM900A 芯片上,其使用GPRA 技术将数据传送至云服务器,服务器再将数据进行处理和存储,实现远端监测,具体流程如图8 所示。
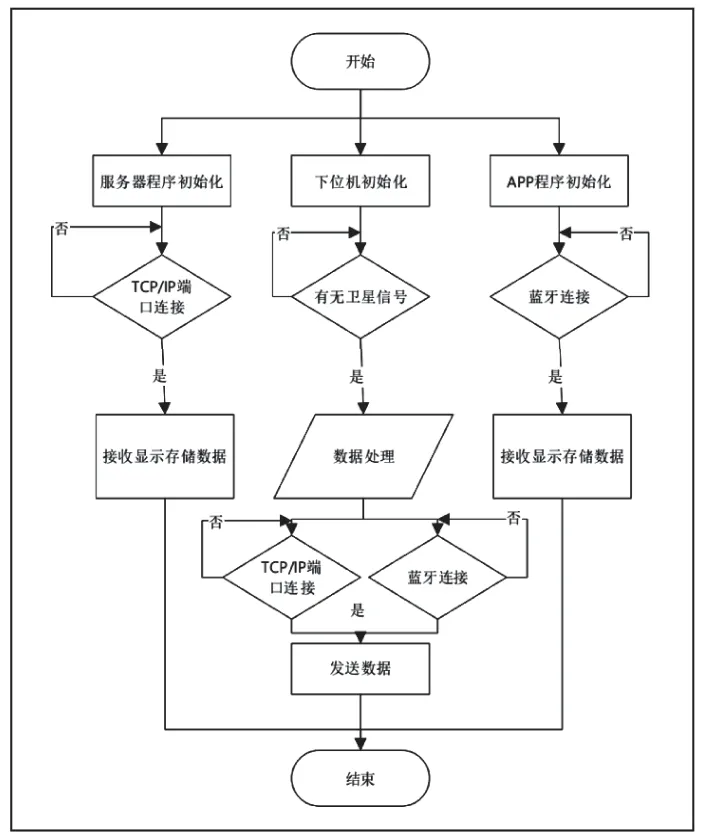
图8 软件总体框图
云端服务器开机后运行Windows Server 2012RC 操作系统,使用之前配置好的固定的公网IP 地址,设置好入站出站的规则,如选择服务器端口“3388”进行开放测试;运行网络端口监测程序,设置网络的协议类型为TCP 服务,监测本地计算机端口“3388”是否有数据客户端请求接入,没有就等待接入请求,有接入请求后记录显示客户端的IP地址和网络端口号,判断端口如果有数据过来就显示终端发送过来的数据,并自动保存日期时间。
下位机程序流程下位机供电后,各模块开始初始化,CC2541 工作后首先开始设置自己的蓝牙名称为:WHL,服务UUID:FFF9 和特征UUID:FFF6;判断自己是否通过蓝牙连接到手机APP,连接后指示灯1s 闪烁一次;卫星定位模块与GPRS 模块判断是否接受卫星信号成功和是否能连接到基站网络,分别显示不同状态的指示灯;卫星定位成功后将RMC 数据包和GGA 数据包发给CC2541,其处理压缩后通过蓝牙发给手机APP,再通过串口控制SIM900A 模块将卫星定位系统采集到的数据上传至云端服务器。
卫星定位系统由ALIENTEK STM32F4 探索者首先进行采集开发调试,实现对经纬度、海拔高度、速度、定位卫星的数据、方向角、精度的实时显示,并将UNIX 时间戳转化为标准时间值,方便用户观看。SIM900A 模块,通过插入手机流量卡,接入附近基站网络;通过GPRS 技术,由基站向远程服务器建立TCP/IP 连接,将海量数据上传至云端。系统选用腾讯云端服务器WINDOWS SERVER 2012RC 操作系统,使用校内电脑,经TCP/IP 连接至云端服务器,并向云端发送数据,云端接检测到有IP 连接请求时响应相应程序,检测对方IP 地址及端口数据变化,记录时间值,显示接收到的数据;从云端服务器向学校电脑端口发送数据,以达到对下位机命令控制请求。利用C/S 架构或者B/S 架构,调试中接入实时卫星数据,调用Google 地图、百度地图、高德地图等的API,可以轻松获得卫星地图数据在WEB 等界面显示,也可在APP 或服务器地图中显示监控系统的坐标卫星监控系统卫星地图显示。
4 结束语
该卫星出行系统可对载体(无人汽车,无人机等)经纬度、行驶速度、时间、里程以及其他状态信息进行记录、存储,通过蓝牙和GPRS 等无线技术实现数据输出给客户端(APP)和云端服务器,同时实现了太阳能发电节能减排、云端服务器存储和大数据处理,功能丰富,应用前景广。