农田自动恒压灌溉多电机控制系统的设计
2022-05-25郭丽虹
郭丽虹
(江西新能源科技职业学院,江西 新余 338000)
0 引言
农田自动恒压灌溉一直是农业生产中的技术难点,常规系统虽然能够解决恒压灌溉的问题,但仍存在灌溉方式切换不及时、程序化控制不全面、灌溉能效依然偏低等问题。本文基于西门子PLC和PID算法设计一款农田自动恒压灌溉多电机控制系统,通过算法设置实现了多电机灌溉中的“工-变”频自动及时切换问题,在步进顺序程序的控制下,也能够全面精准地控制灌溉流程,提升农田自动化灌溉的能效,现将具体的设计思路阐述如下。
1 系统设计需求
农田节水自动灌溉作业是现代农业生产的关键研究领域。常规模式下采用单台电机实现的恒压灌溉具有一定实用价值,但也存在易受农田灌溉现场外部环境变化因素影响,引发实际灌溉水压并不稳定的缺陷。此外,单台水泵电机提供的灌溉能力有限,若实际灌溉农田面积增大,或随季节变化引起灌溉水量需求增多,则很难满足灌溉需求。为解决上述问题,设计一种多电机恒压灌溉控制系统具有现实意义。本文所设计的系统,以PLC、变频器、水泵电机、水流水压模拟信号输入输出模块等为硬件核心,结合农田恒压自动化灌溉生产需求,编写对应的梯形图程序和PID控制算法,以达到提升农田自动化恒压灌溉水平的目标。
2 电气结构及控制原理
2.1 电气结构
系统电气结构如图1所示,1#和2#为2台水泵电机,通过PLC编程进行控制,实现对2台水泵电机的“工-变”频自动切换,以达到自动节水灌溉的目的。系统选用西门子公司生产的S7-200型PLC为中央控制器,外接硬件模块还包括:①水压采集输入模拟量模块EM231,用于采集水泵水压传感器端的实时水压,并与PLC进行数据交换。②水压控制输出模拟量模块EM232,用于将PLC输出水压控制信号传送给变频器,控制水泵电机进行恒压供水灌溉。③西门子MM440型变频器,外接1#和2#水泵控制电机,对2台电机进行“工-变”频模式切换,实现不同场合下的恒压灌溉。
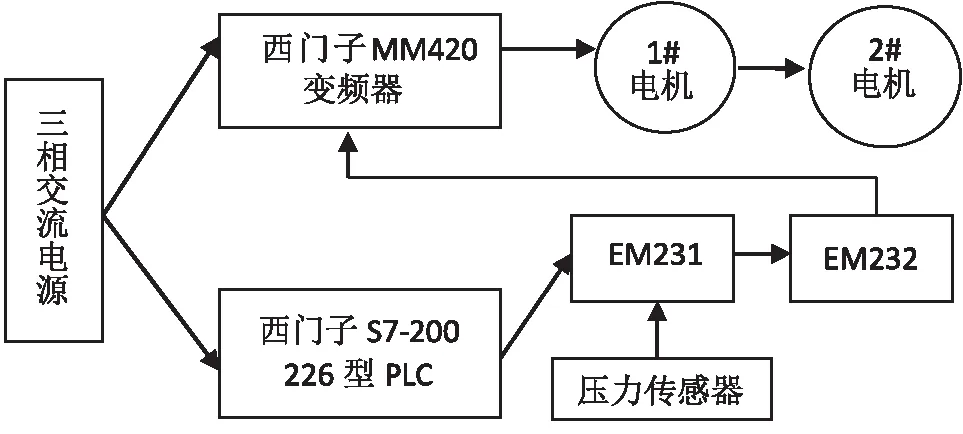
图1 系统电气结构图
2.2 控制原理
本系统包含如下控制部分:启停控制部分由总控开关、启动开关和停止开关等元件组成;水压信号采集输出控制部分由输入模拟模块EM231和输出模拟模块EM232组成,分别用于采集灌溉水压信号和输出PLC控制水压信号;核心控制部分选择西门子S7-200 CPU226型PLC作为本系统的中央处理控制模块;变频控制部分选择西门子MM440变频器模块。
实际控制原理及流程为:操作人员先按下启动开关变频器带动1#水泵电机运转进行灌溉作业。灌溉作业过程中,EM231实时采集水泵水压反馈给PLC进行PID运算处理,若灌溉工作频率达到50 Hz,但水压仍显示不足时,1#水泵电机自动切换至工频运行状态,同时EM232向变频器发送信号,启动2#水泵电机运转,整个系统处于“一变一工”运行状态。若灌溉水压偏高,1#水泵电机自动停止,变频器驱动2#水泵电机作变频运行,以确保整个灌溉作业实现恒压多电机自动控制。
3 恒压灌溉PID控制算法
本系统PID控制流程如图2所示,其原理为:系统作业时,通过压力传感器实时采集2台水泵电机的灌溉水压,并通过EM231模块运算后反馈至输入端,与预设水压值进行比较,得到灌溉水压的实时变化率e,对变化率做PID运算处理,得到优化值Kp、Ki和Kd传输给变频器,变频器按照PID控制算法处理结果自动调配参数,传输给水泵电机,实现对灌溉水压的精准实时控制。
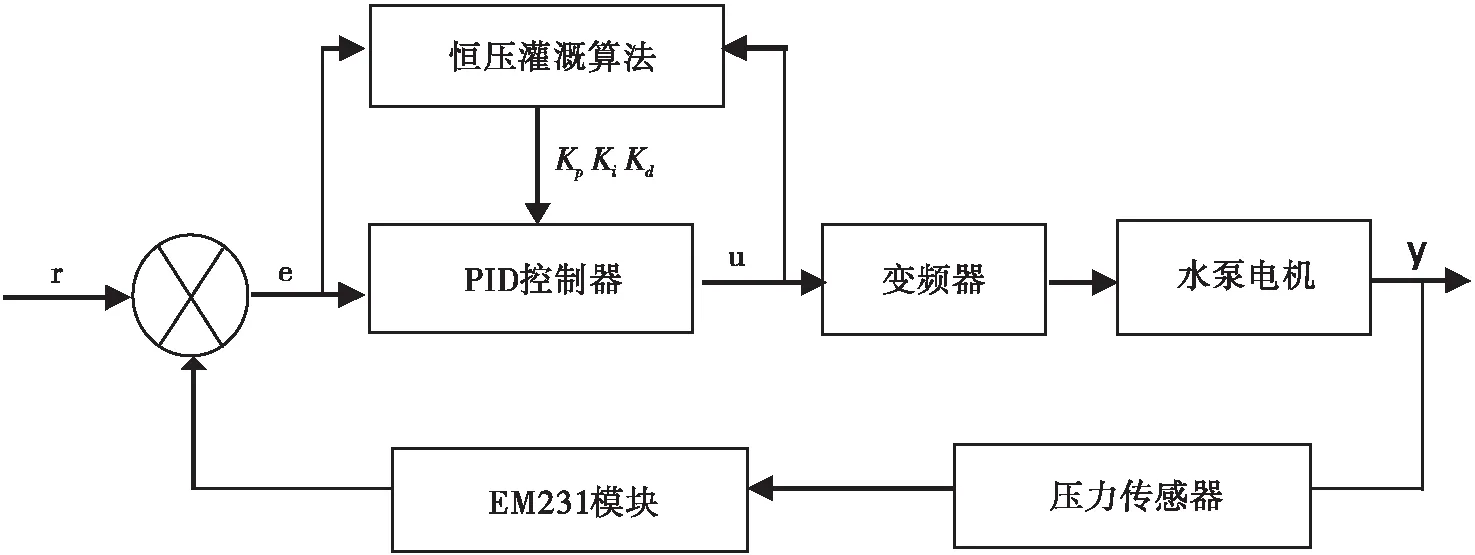
图2 系统PID控制框图
上述控制过程中的PID算法函数为:G(S)=Kp(1+1/T1S+TDS),实际编程时,可应用PLC内部定时器中断指令完成PID算法的定时采样及输出调控。为确保系统应用的可拓展价值,输出设置值为满量程的90%,仅用比例(P)和积分(I)进行控制,系统的回路增益和时间常数通过恒压灌溉算法确定,具体值为:增益Kc=0.25,采样时间Ts=0.3 s,积分时间Ti=25 min。
4 自动恒压灌溉程序设计
本系统采用PLC步进顺序控制指令编译程序,主程序设计流程如图3所示。整个程序由S0.0~S1.0共9步循环组成,按照“启动系统—实时检测水压—水压低,1#泵切换工频模式,2#泵切换变频模式,双泵工作—水压高,1#泵停止,2#泵继续变频运行,停止系统”的常规流程执行。此外,若程序执行过程中遇到蓄水池缺水问题,系统将自动停机。
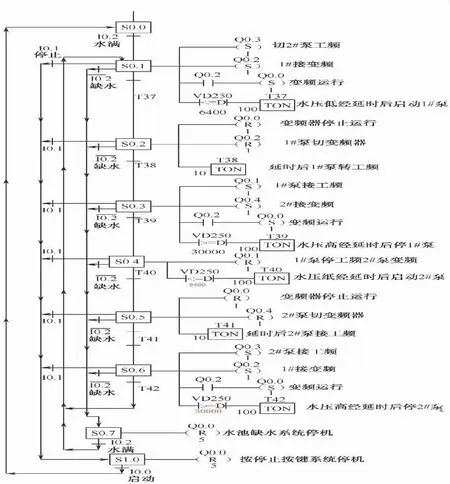
图3 主程序流程图
5 结语
基于PLC和PID控制算法设计农田恒压灌溉多电机控制系统,能够较好地解决农田现场灌溉中存在的作业水压不稳定、自动化水平不高、实时作业效果检测能力不足等问题,有助于提升农田灌溉作业的整体质量。
