结合电子地图的卫星导航动态定位轨迹测试方法研究
2022-05-25梁炜黄艳吴晓昱许原谢立冬
梁炜,黄艳,吴晓昱,许原,谢立冬
(北京市计量检测科学研究院,北京 100049)
0 引言
随着北斗三代卫星导航的全球组网成功,以GPS、北斗为代表的卫星导航能全天候提供覆盖全球的定位服务,且成本越来越低,被广泛应用在智慧交通、智慧城市、消费电子等领域。这些应用中,车载导航产品、无人机、可穿戴卫星导航定位产品所占比重最大,一般结合电子地图来显示其动态定位轨迹,所以,对其进行动态定位性能测试,需要结合具体的位置[1-3]。
目前涉及卫星导航动态定位的计量技术规范有JJF 1403-2013《全球导航卫星系统(GNSS)接收机(时间测量型)校准规范》、JJF 1921-2021《GNSS 行驶记录仪校准规范》。对导航终端的定位偏差要求比较宽泛,通常状况下小于15 m,测试场景一般只对可见星、运动类型有总体要求,具体场景根据实际测试需要配置,多采用仿真匀速直线动或者匀加速运动的动态场景对终端进行测试[4-12]。具体方法:卫星导航模拟器仿真从任意坐标点出发,轨迹设定为符合直线、圆周曲线等运动方程的匀速、匀加速测试场景,输出仿真导航信号使终端解算定位,计算带有时间戳的终端定位结果与模拟器标准定位结果偏差,统计多个偏差得到整体动态定位精度。
此方法存在两个问题:一是测试场景缺乏随机性、不规则性,与实际情况存在偏差。导航终端实际应用中的轨迹并不是简单的直线和圆周运动的组合,车辆直线行驶过程中有随机性变道、加减速,佩戴可穿戴产品运动过程中有随机性方向、速度的变化,这些实际动态轨迹很难用运动方程来描述;二是定位结果为偏差统计值,没有在电子地图中匹配道路显示过程的结果。原场景轨迹直接在大地坐标系或者地心地固直角坐标系中建立,没有参考电子地图中的实际位置、道路,所以定位轨迹与电子地图不匹配。
本文提出结合电子地图位置、道路规划轨迹,按路线随机选取坐标点并连接成轨迹线,导出轨迹坐标点后,在坐标点之间配置不同的运动速度、加速度、高程等参数,生成模拟仿真测试场景。用此场景测试导航终端,可以计算终端动态定位偏差,定位轨迹可导入电子地图中匹配道路显示。通过不规则取点和多变运动状态解决复杂动态轨迹测试场景问题,使模拟仿真测试更接近真实的动态应用。
1 动态仿真测试方法
动态仿真测试的总体方案如图1所示,在电子地图上规划轨迹的起始点和运动路径,依据规划的路径在地图上随机选取坐标点连接成轨迹,导出轨迹坐标点数据。按导航模拟器场景格式要求整理出经度、纬度、高度的数据,在部分坐标点之间配置速度、加速度、高程等动态参数,其配置参数可参考实际导航终端动态应用的典型情况。把场景文件导入到模拟器并配置测试场景,仿真场景测试导航终端,模拟器和导航终端分别记录定位轨迹数据。用软件评估终端的动态定位性能,定量分析不同参数结果,定位轨迹导入电子地图,显示与道路相匹配的两条轨迹实时偏差,分析动态运动过程中变化的定位偏差。
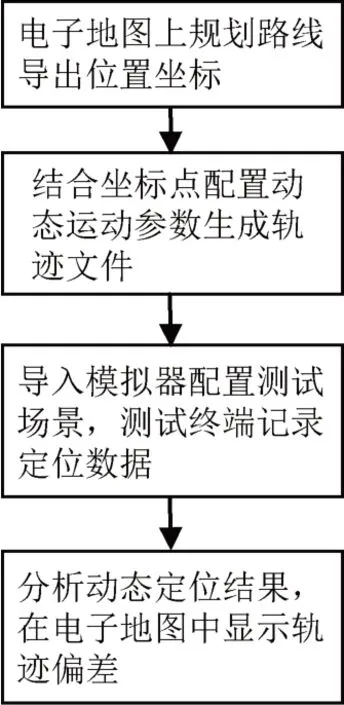
图1 总体测试方案流程图Fig.1 Overall test scheme flow chart
1.1 结合电子地图规划轨迹
在电子地图上选择规划路径的大致区域,设计路线的起始点、终止点和运动路线,从起始点开始按一定间隔随机选取坐标点连接成轨迹路线。选取坐标点时的间隔可根据需要调整,如果轨迹较短且对轨迹变化细节要求高,可适当减小取点间距,如果轨迹较长且过程变化不明显,可扩大取点间距。例如:直线路段运动方向性不变,坐标点可以选择较大间隔;转弯路段运动方向实时变化,选取坐标点较小间隔,可使路线轨迹相对平滑。生成轨迹路线后导出坐标点和轨迹文件。
1.2 利用轨迹坐标制作动态测试场景
利用坐标点制作轨迹有两种模式:时空状态模式和空间状态模式。时空状态模式在连续时间轴上描述不同时刻的载体位置、姿态信息,每条语句按固定格式包括载体时间、位置、姿态、加速度、加加速度等信息,连续语句载体状态满足运动方程关系,最终形成满足时间、空间的动态轨迹;空间状态模式没有时间标签,位置语句描述载体坐标点位置,状态语句描述坐标点之间的载体运动动态特性,一般为加速、减速、爬坡等,通过一系列位置语句和状态语句形成动态轨迹。
1.2.1 时空状态模式
时空状态模式主要用语句描述载体的时间、位置、状态,用一系列语句构成完整的运动轨迹,一般语句配置内容为相对时间、三轴位置、三轴速度、三轴加速度、三轴加加速度。
“时间”为从仿真开始时间算起的相对时间,可以非等间隔配置,其最小识别时间分辨力与模拟器更新率有关,如更新率为1000 Hz,理论上最小识别时间为1 ms。
“位置”为三轴位置坐标,可以用地心地固直角坐标系(x,y,z)表示,也可以用大地坐标系纬度、经度、高程(B,L,H)表示,二者转换关系[13]为
式中:N为基准椭球体的卯酉圈曲率半径;e为椭球偏心率,与基准椭球体长半径a和短半径b的关系满足

其它配置参数还有三轴速度、三轴加速度和三轴加加速度,配置方法与三轴位置坐标相同,参数值不配置可为空。
此模式根据时间空间状态描述载体运动轨迹,按时间顺序语句描述的状态必须符合运动方程规律,否则会出现错误。如:在前一位置上,通过速度、加速度和持续时间,推算出的位置要与下一条语句位置坐标对应,若两者存在较大偏差则会出现位置不重叠错误。在只保留时间、位置参数,不考虑运动方程的情况下,其状态为随时间变换的坐标点,无速度、加速度等运动状态,可满足一定的测试需求,但由于轨迹只有时间和位置坐标点,若终端解算需要除位置以外的其它运动参数,则此类模式不适用。
1.2.2 空间状态模式
空间状态模式主要用语句描述载体的位置和位置变化过程中的状态,连续的位置和状态语句构成完整的运动轨迹。其中,位置语句只描述载体位置,运动状态语句描述经多长时间后速度达到终值。
“位置语句”中,三轴位置坐标一般用大地坐标系纬度、经度、高程表示,即(B,L,H),也可以用地心地固直角坐标系(x,y,z)表示,若需要坐标转换同式(1)~式(3)。模拟器对大地坐标系中经度、纬度、高程表示形式的定义,可用度或弧度[14-15]表示,二者转换关系为
“状态语句”包括速度变化语句、高度变化语句等。速度变化语句参数包括持续时间和最终速度。持续时间表示由前一个速度变化到新的速度持续多长时间;达到最终速度后速度保持恒定。通过时间与速度变化关系可计算加速度。高度变化参数与速度类似。
场景文件包括一系列的位置语句和状态语句,且状态语句插入在位置语句中。状态语句的多少和改变速度大小可根据需要进行配置,形成的运动轨迹包含位置和速度参数。在某些被测终端需要计算轨迹里程的场合,里程采取速度和时间积分计算得到,此空间状态模式场景满足需求;但若采用简易时间空间位置模式,只有坐标点没有速度,终端得不到里程值。
1.3 模拟器利用制作场景对终端测试评估
把制作的测试场景文件导入模拟器,并设置测试时间和测试信号频点及功率。模拟器信号输出端连接终端信号输入端,仿真测试场景对终端测试。若终端为接收机、天线一体机,可采用在暗室/暗箱内通过发射天线空间辐射的方式对终端测试。通过软件记录终端解算导航数据,同时记录模拟器仿真轨迹导航数据,用软件分析二者导航数据计算定位偏差(包括三轴分别定位偏差,总定位偏差,标准差等),从而得到终端动态定位精度的统计结果。同时,把定位轨迹导航数据转换成KML 格式文件,导入到电子地图中,可以得到与电子地图道路匹配的两条轨迹的实时偏差结果。
2 仿真测试实验及结果
实验选用Spirent 公司9000 高精度卫星导航模拟器和Septentro 公司高精度接收机作为实验设备,仿真测试系统如图2所示。模拟器支持外轨迹场景制作功能,接收机有定位数据记录软件,也可通过串口记录NMEA0183 格式导航数据,电子地图和定位偏差评估软件使用第三方公开软件。

图2 仿真测试系统Fig.2 Simulation test system
动态测试轨迹路线规划为:以北京北苑路街道作为起点,沿北苑路经安远路到奥体中心东南角,沿奥体中路、北辰路、北四环辅路,经安定路后返回奥体中心东南角。打开电子地图,找到轨迹所在区域,沿规划轨迹随机点击选取位置坐标点,坐标点之间直线连接,最后形成轨迹,直线路段坐标点间隔约为15 m,转弯路段为3~5 m。轨迹生成后导出GPX格式和KML格式数据。
根据模拟器对不同模式文件格式的定义,制作动态仿真场景文件,对时空状态模式MOTB语句定 义 为:timestamp,MOTB,lat,long,height,vel_n, vel_e, vel_d, acc_n, acc_e, acc_d,jerk_n,jerk_e,jerk_d。代码依次表示:时间戳,s;语句符号;纬度,rad;经度,rad;高程,m;速度北,m/s;速度东,m/s;速度下,m/s;加速度北,m/s2;加速度东,m/s2;加速度下,m/s2;加加速度北,m/s3;加加速度东,m/s3;加加速度下,m/s3。使用时间戳和从轨迹导出的GPX 格式坐标点数据制作场景,部分数据见表1。第一列为时间/s,第二列为纬度/rad,第三列为经度/rad,其它参数设为无,时间间隔设为5 s,导出的GPX 坐标数据为度,用式(6)转换为弧度,平原高度变化很小,统一设为50 m,最终场景文件有258 条语句,持续时间1365 s。

表1 时空模式部分场景数据Tab.1 Spatio-temporal mode partial scene data
空间状态模式位置语句被定义为CAR_WAYPOINT:(B,L,H),纬度,rad;经度,rad;高 程, m。 状 态 语 句TERR_ACC 定 义 为t,FINAL_SPEED,持续时间,ms;最终速度,m/s。用导出的GPX 弧度纬、经度坐标和高度50 m 设为连续位置语句,其中第一个位置点设为起始点,在位置语句中间插入状态语句,第2位置点后加速2 s,速度由0 m/s 变为2 m/s,第8 位置点后加速2 s,速度由2 m/s 变为4 m/s,依次做加减速变化,最后持续减速1 s,速度降为0 m/s,最终场景文件有264条语句,部分数据见表2。
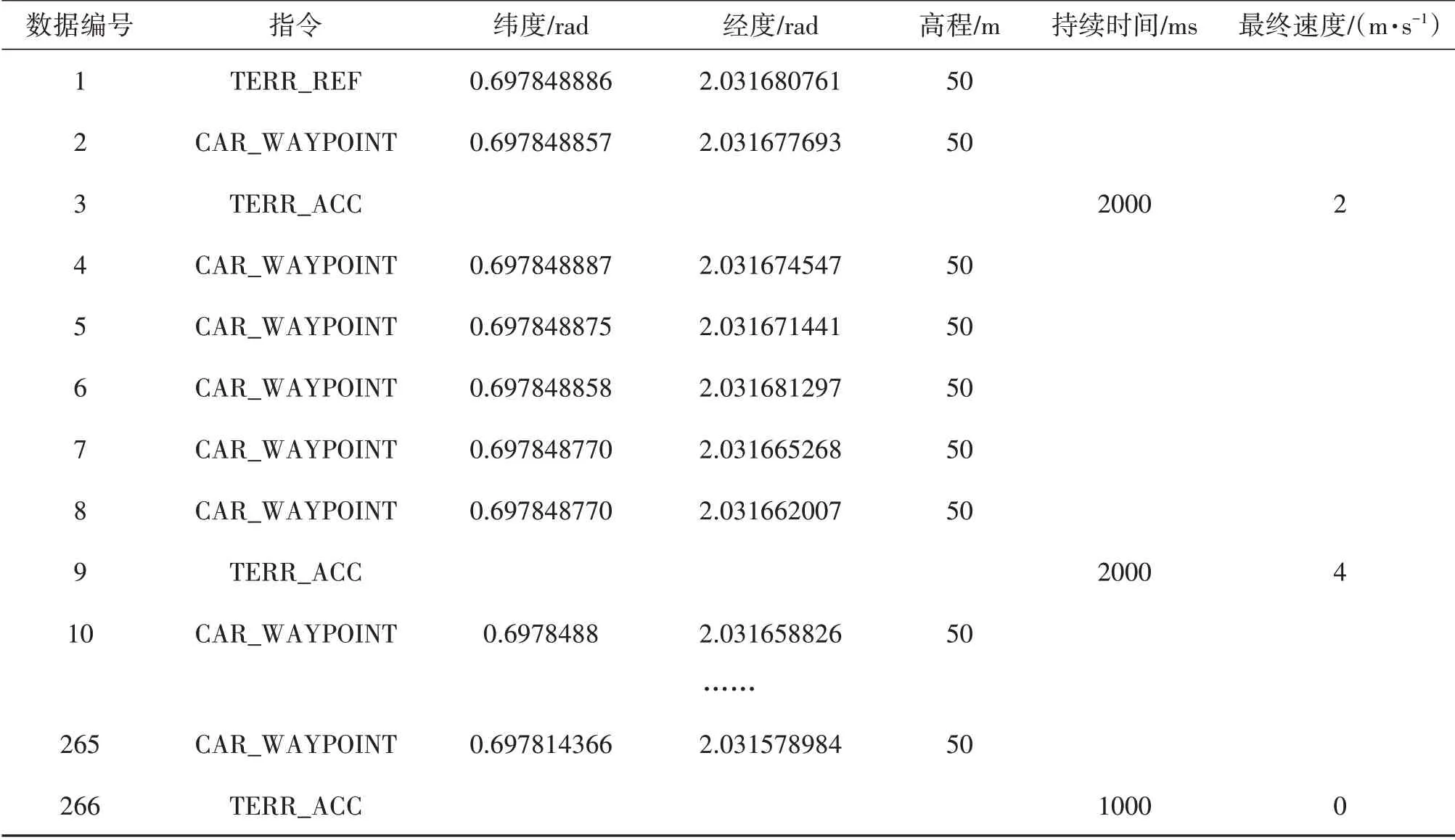
表2 空间状态模式部分场景数据Tab.2 Spatial state mode partial scenario data
终端测试实验使用空间状态模式测试场景,在模拟器仿真软件建立新测试项目,把制作的场景导入到模拟器仿真软件相应车辆场景文件中,设置测试场景日期,选择GPS 的L1 频点和BDS的B1I 频点,每个频点配置12 颗星,信号功率为-120 dBm。仿真输出导航信号对高精度接收机进行测试,同时记录场景的NMEA0183 格式中的GGA 语句,接收机连接软件,待定位后开始记录定位数据,数据包含NMEA0183 格式中的GGA 语句,仿真场景如图3 所示。

图3 模拟仿真测试场景Fig.3 Simulation test scenario
用后处理软件导入模拟器和接收机GGA 数据文件,分析定位偏差,整个轨迹内有效定位1986个结果,计算相同时间戳下x,y,z轴单独定位偏差和和三轴总定位偏差,纵坐标为定位偏差,横坐标为时间,如图4所示。

图4 接收机定位偏差曲线Fig.4 Receiver positioning deviation curve
定位偏差中前300 s 为静态定位偏差,其后为动态定位偏差,静态定位偏差波动较小,收敛后趋于稳定,稳定后波动小于0.1 m,动态定位偏差均值较平滑,随机波动,波动小于0.5 m。x,y,z三个轴向定位精度方均根约0.1 m,三轴总定位精度0.17 m,单轴与总方差均小于0.01,见表3。

表3 模拟器空间状态模式测试接收机定位精度Tab.3 Receiver positioning accuracy tested in simulator spatial state mode
仿真场景的卫星导航信号质量可通过分析接收机可见星的精度因子(DOP)和信号载噪比来评估,如图5、图6 所示,PDOP 均值1.6,HDOP 均值0.9,VDOP 均值1.3,各卫星信号载噪比在37~40 dBc之间,场景卫星导航信号处于较好状态。
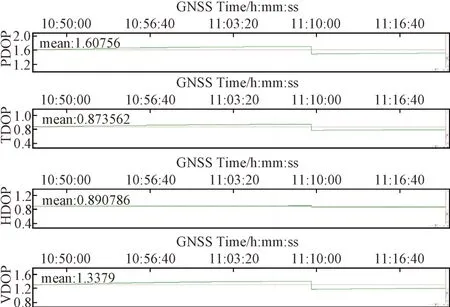
图5 可见星分布精度因子(DOP)曲线Fig.5 Visible star distribution factor of precision(DOP)curve

图6 不同卫星信号载噪比Fig.6 Carrier to noise ratio of different satellite signal
传统评估定位点轨迹如图7所示,只有经纬度数据,没有在电子地图中显示,也没有与标准轨迹的比较。

图7 接收机定位坐标点轨迹Fig.7 Receiver positioning coordinate point track
把接收机导航数据转换为KML 格式文件,与标准轨迹文件一起导入电子地图中,可直观显示匹配地图道路轨迹偏差,绿色轨迹为在地图上规划的标准轨迹,红色轨迹为通过仿真测试后接收机导出轨迹,如图8所示,两条轨迹偏离很小,验证了之前定位精度统计数据结果,同时又直观显示了轨迹偏差的变化情况。

图8 电子地图下接收机动态定位轨迹偏差Fig.8 Receiver dynamic positioning track deviation under electronic map
地图放大后可显示局部轨迹偏差,如图9与图10 所示,在直线路段轨迹偏差较小,接收机轨迹围绕标准轨迹上下波动,但在转弯路段偏差较大,说明动态仿真测试中,运动方向变化较大会对定位精度造成影响。

图9 局部轨迹放大图Fig.9 Partial enlarged view of track

图10 局部转弯轨迹放大图Fig.10 Partial enlarged view of turning track
3 结论
提出结合电子地图规划接近实际运动的轨迹,提取轨迹坐标点并依据模拟器定义的模式制作成动态测试场景,仿真测试评估导航终端定位精度的同时,还可以在电子地图上显示匹配道路的轨迹偏差变化。该方法可以根据需要任意规划动态轨迹路线,解决一般模拟器利用运动方程制作的动态测试轨迹单一、缺少随机性的问题。此外,终端测试结果除可以评估动态定位精度外,定位轨迹偏差可在电子地图上匹配道路显示,对于车载导航仪、运动手表等导航定位与电子地图密切关联的导航终端,其测试结果更直观,更接近实际。
