基于GNSS/INS联合仿真的组合导航终端测试方法研究
2022-05-25许原姚和军黄艳梁炜高伟
许原,姚和军,黄艳,梁炜,高伟
(北京市计量检测科学研究院,北京 100029)
0 引言
随着社会经济发展的信息化、智能化程度越来越高,高精度、高可靠性、高实时性的时空信息服务需求日益增长,全球导航卫星系统(Global Navigation Satellites System,GNSS) 的建立和发展恰为人们提供了精确的位置、速度和时间信息[1]。上世纪70年代以来,计算机技术和现代控制理论的成熟为GNSS/INS(惯性导航系统,Inertial Navigation System,简称INS)组合导航技术的研究和组合导航终端的研制奠定了坚实的理论基础和技术保障。鲁道夫. 卡尔曼于1960年提出了基于离散时间系统的卡尔曼滤波器,并成功应用于阿波罗登月计划等重大航空航天工程[2]。随着组合滤波技术和惯性传感器技术的发展,GNSS/INS 组合导航终端以其优异的性能广泛应用于武器精确制导、航天航空遥感、卫星定轨定姿、飞机导航与精密进近着陆、智慧交通物流等领域[3]。近年来,随着自动驾驶技术快速进入商业成熟阶段,对组合导航终端的性能要求日益提高,这些切实的需求对动态计量技术提出了新的挑战[4]。
目前对于组合导航终端的测试方法可分为实际运动载体测试、软件仿真测试以及半实物仿真测试三类。实际运动载体测试法的结果真实可靠,缺点是成本高且过程难以复现;软件仿真测试法对传感器建模、时间同步等技术要求较高,无法获得客观准确的测试结果,而半实物仿真测试吸收了实际运动载体测试和软件仿真测试的优点,既可有效保证测试的真实性,又能获得较好的测量重复性和稳定性。卫星导航半实物仿真测试和惯性导航半实物仿真测试技术已较为成熟。但将待测GNSS/INS 组合导航终端分别进行卫星导航和惯性导航的半实物仿真测试并不能准确评价和分析其组合算法的有效性,这限制了目前组合导航产品的研发和过程测试。
本文在卫星导航和惯性导航半实物仿真测试技术的基础上,结合传感器数字建模、地理信息数字建模、高精度时间同步等技术,提出了一种既能对组合导航终端传感器进行测试、又能对组合导航终端的组合算法进行有效测试的联合仿真测试方法。该方法可突破传统转台测试对于空间位置、速度、加速度等参数测量范围的限制,还可提高卫星导航半实物仿真测试场景的逼真度,更重要的是解决了实际运动载体测试无理论真值的问题,为自动驾驶行业提供了一种可复现、可溯源、成本可控且高效的组合导航动态半实物仿真测试方法。
1 组合导航经典测试方法
组合导航终端主要测量参数包括姿态、位置、速度、时间等,因此测试工作也针对这些变量展开[5]。根据终端应用场景的不同需求,测试方法分为静态测试和动态测试,其中动态测试对于测试系统的技术要求高、测试难度大[6]。如何准确有效地提升组合导航终端的动态精度是当前测试领域面临的主要难题。目前对于组合导航系统的性能检测主要有实际运动载体测试、软件仿真测试和半实物仿真测试[7]。
1.1 实际运动载体测试
目前行业内对于组合导航系统测试多使用实际运动载体测试[8],且测试系统需要有专门的测量标准器(一般为性能指标高于被测产品3倍以上的组合导航终端)。以实际运动载体和更高精度的测量设备为标准的测试直观可靠(如飞行校准、火箭橇校准、车辆校准等[9]),但测试成本高,运动测试场景受到很大限制,且很难重复实验数据[10]。同时由于其中的组合算法在研发过程中,需要协调各子系统进行调试验证、综合评估系统表现,这一过程很难通过实际运动载体测试完成,不利于组合导航系统的技术开发与性能评估。
1.2 软件仿真测试
为了降低测试成本,提高测试效率,国内外高校和研究机构提出了GNSS/INS 组合导航系统软件仿真测试方法,运用Matlab 软件和VisualC++语言制作开发平台,研制了组合导航系统仿真检测系统,在实验室内完成了组合导航终端的定量测试评价[11]。
1.3 半实物仿真测试
半实物仿真又称为硬件在环仿真,是指在仿真实验系统回路中接入部分实物的实时仿真。半实物仿真测试指将被测对象接入测试系统并实时采集被测数据。这种方法与同类仿真测试相比,具有较低成本条件下获得较高测试真实性的优势。
实际载体运动测试和软件仿真测试方法由于测试工作原理的限制无法全面解决组合导航终端开发过程中的测试需求,因此半实物仿真测试技术成为解决组合导航终端性能测试的主要手段[12],广泛应用于研发企业和第三方测试机构。
2 GNSS/INS联合仿真两步法
对于组合导航终端的计量测试,传统测试方法是对卫星导航和惯性导航传感器分别独立进行测试,因此无法测试组合算法的性能[13]。为此,本文在此工作基础上提出了基于卫星导航模拟源和三轴电动转台的联合仿真测试方法,通过控制两个仿真系统信号、仿真数据流的时间同步误差和惯性坐标系的转换融合,实现GNSS/INS 的组合导航终端的联合仿真测试,系统工作原理如图1所示。

图1 半实物联合仿真测试系统Fig.1 Hardware in the loop joint simulation test system
测试方法实现步骤如下:
1)通过三轴惯性转台的仿真测量,得到惯性传感器的主要误差模型参数[14],包括陀螺和加速度计的零偏、标度因数等。被测组合导航终端通过转台获得的陀螺零偏稳定性测量结果如图2 所示,加速度计零偏稳定性测量结果如图3所示。通过上述测量结果可得到陀螺和加速度计误差型中零偏常值和随机噪声等必要参数。

图2 陀螺三轴零偏稳定性测量Fig.2 Measurement results of zero bias stability of gyro axes

图3 加速度计三轴零偏稳定性测量结果Fig.3 Measurement results of zero bias stability of accelerom⁃eter x,y and z axes
2)利用数学仿真软件设计动态仿真试验场景,设计载体运行的初始状态、运动状态和轨迹参数,并以此计算传感器在相应时刻获得的加速度、角速度、线速度、位置等物理量。
3)模拟器同步输出GNSS 射频信号,输入组合导航终端进行联合仿真测试。
4)将模拟测试场景的导航信息与待测组合导航终端的输出结果进行比较,获得终端定位精度结果。
为了将惯性传感器仿真的坐标系与卫星导航仿真的地理坐标系转换到同一个参考坐标系下,并考虑惯性传感器载体安装位置与天线相对几何关系,本文对被测样品的坐标系变换如下:欧拉角用偏航-俯仰-横滚(yaw-pitch-roll)3 个角度变量来描述任意一个姿态旋转:绕Z轴旋转为偏航角yaw(ψ);绕Y轴旋转为俯仰角pitch(θ);绕X轴旋转为横滚角roll(φ)。本文仿真模型中定义方向余弦矩阵(DCM)的欧拉角如式(1)所示。

式中:RMψ,RMθ,RMφ为绕单独每个轴的旋转矩阵。
DCM为正交单位矩阵,且满足

从载体坐标系到地理坐标系的转换为

式中:VNED为地理坐标系;Vbody为载体坐标系。
相反,从地理坐标系到载体坐标系的转换为

惯性传感器误差模型(初始化对准误差、安装误差、设备误差、随机噪声)参数被导入联合仿真模拟器,根据任务设置仿真测试场景;记录被测终端输出与场景理论值之间的比较。基于源数据(包括信号频率、偏振模式、波入射角、介电常数和反射面电导率),可以准确预测多径信号的损耗和延迟分布,从而准确模拟接收点反射信号的场强和相位。结合掩模条件下反射信号动态仿真技术和反向光线跟踪技术的高保真实时仿真技术,利用三维地理环境引擎同步驱动卫星信号仿真。
3 联合仿真测试系统的组成
GNSS/INS 联合仿真测试系统主要由多体制GNSS信号模拟器、GNSS信号同步环境模拟器、惯性传感器数据流模拟器及测控系统上位机四部分组成。
3.1 多体制GNSS信号模拟器
多体制GNSS 信号模拟器主要实现BDS,GPS,GLONASS,Galileo 等GNSS 星座的卫星导航射频信号的仿真,包括GNSS 信号空间段误差模型、传输段误差模型、载体运动状态和轨迹模型、接收机天线增益方向图和载体遮罩效应对于信号功率电平衰减、相位延迟等变量的误差模型仿真。
3.2 GNSS同步三维环境模拟器
GNSS 同步三维环境模拟器主要实现GNSS 信号在地面段的信道仿真,可模拟组合导航终端的应用环境场景(如山体、建筑、植被、水面)对于GNSS 信号的遮挡、多径反射和散射效应,从而实现逼真的GNSS 定位性能仿真,更加有利于组合算法有效性的测试。
3.3 惯性传感器数据流模拟器
根据被测组合导航终端惯性传感器输出的数据协议,INS 仿真子系统中的数据流模拟器可根据被测的惯性测量单元(Inertial Measurement Unit,IMU)误差模型生成对应时序的仿真数据流,每帧数据包含13个字段,包括语句同步字符、x陀螺输出、y陀螺输出、z陀螺输出,x加速度计输出、y加速度计输出、z加速度计输出、北斗时周计数、周内秒计数、周内毫秒计数以及CRC 校验字符等。通过同步字符和北斗时字符可将INS仿真数据流与GNSS 仿真信号进行同步,从而在测试被测组合终端的算法时跳过IMU 传感器,实现GNSS 和INS 的联合仿真测试,实现过程如图4所示。

图4 惯性传感器数据流仿真流程Fig.4 Simulation flow of inertial sensor data stream
3.4 测控系统上位机
联合仿真测控系统Navsim 根据TCP/UDP 协议实现卫星导航信号模拟源、GNSS 同步三维环境模拟器、惯性传感器数据流仿真器的驱动和实时通信控制。为了实现仿真测试任务的管理和数据评估,项目组设计开发了自动化测控系统Navtest,可实现测试流程管理、数据分析评估,并自动生成报告。联合仿真系统负责完成坐标系之间的转换、卫星星座仿真、信号传输过程仿真、载体运动轨迹仿真、观测数据仿真,并根据上述信息生成模拟的GNSS 射频信号。数据分析评估子系统负责实时采集被测终端输出的测量结果,将其与标准数据进行比较,最终计算出姿态、位置、速度、加速度等参数的误差并作可视化处理;针对以上各模块负责在数据库中建立相应的数据表。仿真模型管理子系统负责实现模型的录入、模型的查询以及模型的调用和管理。综合显示子系统对数据管理子系统中的数据进行可视化,包括卫星二维地图分布图、站心图、载体运动仪表以及载体二维运动轨迹图。Nav3D模拟终端应用的复杂环境对GNSS 信号产生的多径、遮挡效应,生成的信息实时传输至NavSim。NavSim 结合Nav3D 生成的信息,合成GNSS 直达和多径信号控制信息流发送至导航信号源,生成有遮挡和多径效应的GNSS 导航射频信号。卫星导航模拟器和同步环境模拟器实现GNSS高仿真的工作原理如图5所示。

图5 GNSS同步仿真系统工作原理图Fig.5 Principle diagram of GNSS synchronous simulation system
4 联合仿真系统的试验验证
为了验证联合仿真测试系统的性能,首先在标准基线场进行了静态场景的试验验证,试验数据统计结果如图6 所示。试验应用6 m 微网基线和仿真系统模拟的基线场景对MHT-I760-D型组合导航终端进行测试,试验共收集了15天的测量结果,将室内模拟测量结果与实际测量结果进行比对,应用后处理软件解算静态基线长度,模拟测试与实景测试结果小于1 mm。

图6 仿真系统静态场景性能验证Fig.6 Static scene performance verification of simulation system
为了验证仿真系统动态测试的有效性,本文用INS仿真子系统产生的数据与六自由度轨迹模型产生的数据做比对,进行了移动场景的测试试验验证。动态仿真场景分别为静止、匀速直线运动、圆周运动、六自由度运动等场景,证明INS仿真子系统的零偏、一次项误差、随机误差等模型仿真数据准确有效。
圆周运动场景的仿真配置参数为线速度为30 m/s,偏航角角速度1 deg/s,运行360 s,距离10800 m。六自由度模型计算轨迹时,将轨迹模型计算出来的轨迹数据按照10 ms 一个点进行存储,轨迹数据同时传入调用INS仿真模块接口,计算出包含误差的IMU 数据,以及积分反算的轨迹数据,同样按照10 ms 间隔进行保存。使用Matlab 对轨迹数据做差,gy_diff 是INS 仿真模块计算的陀螺角误差数据与仿真轨迹预设的理论真值数据进行作差的结果,如图7所示。acc_diff是INS仿真模块计算出来的加速度计数据与仿真轨迹模块计算出的加速度计数据进行作差的结果,如图8所示。根据三维圆周运动和俯仰、横滚、偏航三个姿态角和三维位置都变化的任意曲线运动场景仿真的结果分析可知,陀螺数据流仿真的结果与理论值的偏差小于1×10-12rad,证明陀螺和加速度计三维误差模型仿真准确有效。加速度计数据流仿真的结果与理论值的偏差小于1×10-12m/s2。
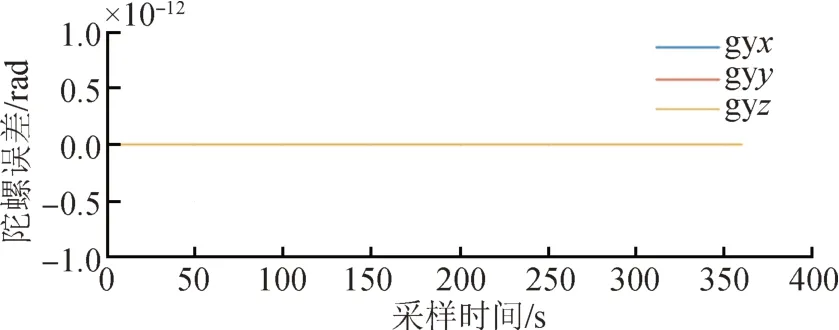
图7 圆周运动陀螺仿真值与理论值误差Fig.7 Gyro error between between simulation value and theo⁃retical value of circular motion
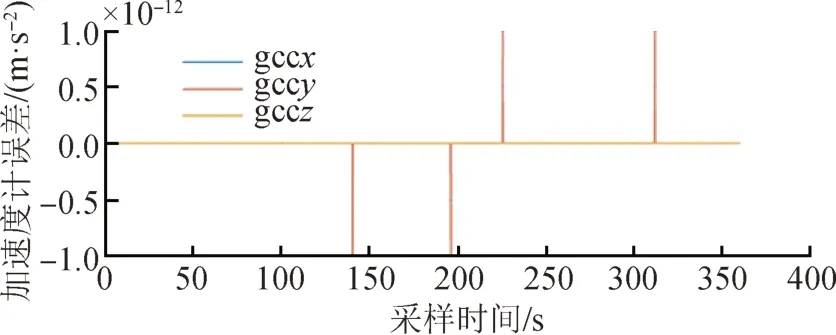
图8 圆周运动加速度计仿真值与理论值误差Fig.8 Accelerometer error between simulation value and theo⁃retical value of circular motion
diff ecef 由原始轨迹数据与INS 仿真模块积分计算出来的数据进行作差所得,显示了仿真出的IMU传感器测量位置信息与仿真轨迹理论位置信息在地心地固坐标系下的差值,结果如图9示。陀螺和加速度计仿真数据符合预期,ecef坐标位置的偏差相比匀速直线运动明显放大,原因是积分产生的误差经过时间累积,时间越长偏差越大。

图9 圆周动态仿真位置值与理论值误差Fig.9 Error between position value and theoretical value of cir⁃cumferential dynamic simulation
进一步增加仿真测试场景的复杂度以验证仿真测试系统的有效性,用六自由度螺线运动场景替代上一个圆周运动测试场景,同时传感器误差模型中增加白噪声、随机常值、一阶马尔科夫等误差模型,运动轨迹如图10所示。
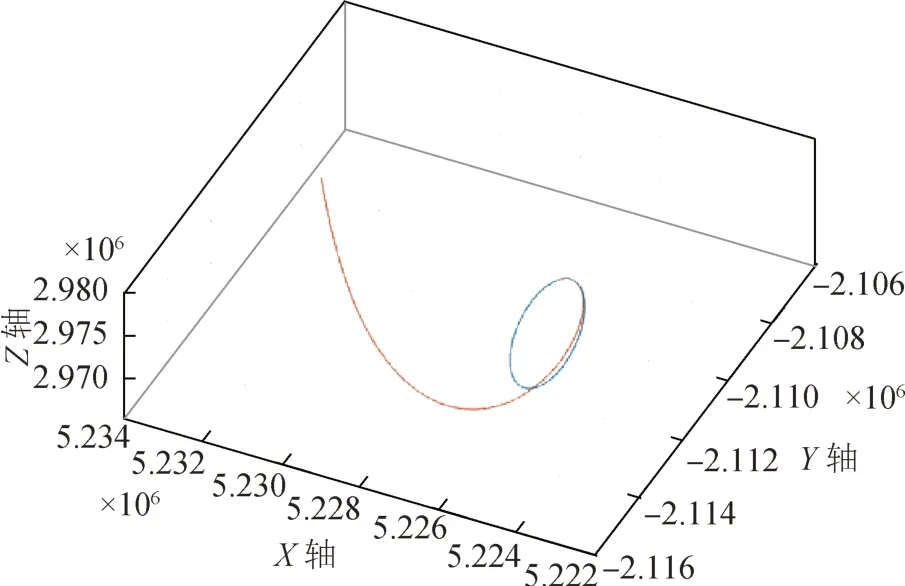
图10 六自由度变化仿真测试轨迹示意图Fig.10 Schematic diagram of six degrees of freedom change simulation test track
通过完善误差模型,INS 仿真器可实现对不同被测型号IMU 传感器误差模型的特征化,从而模拟被测传感器的测量数据流输出。增加各误差模型后陀螺模拟数据流与理论值误差约为6×10-4rad,与传感器说明书指标5.8×10-4rad 基本一致。试验表明INS仿真子系统可实现特定型号IMU 传感器特征的模拟测试,联合仿真测试方法有效准确。
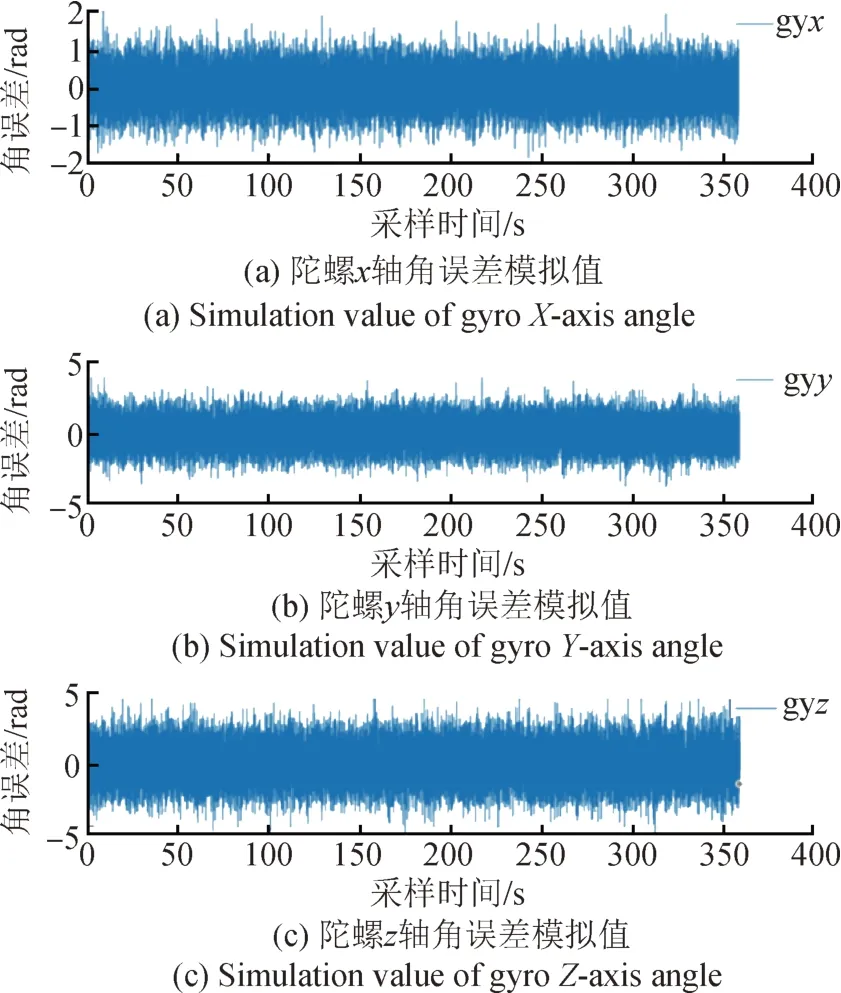
图11 增加白噪声模型后陀螺三轴角误差模拟数据Fig.11 Simulation data of angle error of gyro x,y and z axes after adding white noise model

图12 增加一阶马尔科夫模型后陀螺xyz三轴角误差模拟数据Fig.12 Simulation data of angle error of gyro x,y and z axes after adding first-order Markov model
5 结论
与传统的实际载体运动测试相比,GNSS/INS联合仿真方法结合卫星信号仿真和惯性数据流仿真,可实现对组合导航传感器和算法同时测试。GNSS/INS 组合导航联合仿真两步法更容易获得理论标准值,且能够在相对较低成本下获得较高的测试逼真度和效率。同时,由于测试场景的各项参数可根据终端的应用场景进行个性化设计和调整,这使得联合仿真测试系统具有更高的任务拓展性和测试需求适应能力。
建立GNSS/INS 联合仿真测量系统,特别是具有动态场景仿真能力的测试系统,可有效解决实际运动载体测试条件受限、一致性和复现性难以保证的问题,对促进高精度导航设备和器件的研发和应用具有重要意义。
可以预见,随着自动驾驶汽车、无人机、机器人等智能无人系统的发展和应用,未来市场对于组合导航仿真测试技术需求将会向全物理场、智能化、高精度同步方向发展,对联合仿真系统的测控平台的动态范围、同步精度、算力等将提出更高考验。
