基于温度传感器阵列的圆型热式测风仪设计
2022-05-25行鸿彦侯天浩
刘 洋,行鸿彦,侯天浩
(1.南京信息工程大学 气象灾害预报预警与评估协同创新中心,南京 210044;2.南京信息工程大学 江苏省气象探测与信息处理重点实验室,南京 210044)
0 引言
风是由空气流动引起的一种自然现象,风速和风向作为气象要素的重要组成部分,其精确的测量在航空航天、工农业生产、环境监测、气象预警等领域都发挥着重要作用[1,2]。随着社会的日益发展,人们对不同测风方法的研究也愈来愈多,主要的测量方法是机械测量法、超声波测量法、激光多普勒测量法以及热式测量法,但机械测量法存在旋转轴,易受恶劣天气影响而磨损;超声波测量法测风时会产生阴影效应;激光多普勒法测量精度取决于空气中气溶胶水平,测量质量不稳定。针对这几种传统测风法存在的不足,学者们不断探索改进的方法来弥补不足,但终究无法从根本上解决问题。因此文章提出了一种新型的测风方法,即基于温度传感器阵列的热式测风法。
与国外相比,中国对热式测风法的研究起步较晚,早在1902年,Shakepear在伯明翰就开始了热线式风速仪的原理性研究,到了20世纪60年代,国外对热式测风法的研究已较为成熟。中国因起步较晚,国内市场上的热式测风仪严重依赖进口,且销售价格高[3],目前多数为手持式热线式测风仪,其工作原理是将一根通电加热的细金属丝置于气流中,根据金属丝的散热量确定流速。这种手持式热线式测风仪最大的缺点是只能测量风速而不能测量风向,且由于金属丝又细又脆,不适用于恶劣环境。
文章在分析手持式热线式测风仪的基础上,利用温度传感器阵列,提出了一种新型热式测风法,该方法用32个温度传感器和1个中心热源弥补金属丝无法测量风向的不足,通过分析阵列的温度场分布,反演出实时风速及风向。且该方法设计的热式测风仪无机械结构,属于固态测风仪,不易受损。由于环境温度会对测风仪的测量精度造成一定影响,文章还提出了遗传算法优化BP神经网络算法补偿测风仪的温度漂移,从而提高了热式测风仪的测量精度。
1 热式测风原理
热式测风仪是在热场和风场直接作用下进行工作的,其工作原理是涉及热学、流体力学等多种学科的综合性理论[4]。在设计热式测风仪前,需要对流体直接的热量传递情况进行分析。当流体与发热的固体壁之间既直接接触又相对运动时,这一热量传递过程称为对流换热。
流体温度小于固体壁温度时,可用对流换热的牛顿冷却公式表示为:
Φ=AhΔT
(1)
ΔT=tw-tf
(2)
式中,A为换热面积;h为对流换热系数,单位是W/(m2·K);tw、tf分别为固体壁与流体的平均温度,则流体与固体壁间的对流传热量Φ与流体与固体壁间的温差ΔT成正比[5]。

(3)
根据式(1)、(2)、(3)可以理解,如果获得热源周围一定空间内的流体温度,即可反演出流体速度V。
2 圆型阵列热式测风仪设计
2.1 阵列设计
圆型阵列是一个可以同时测量风速风向的阵列。由于在有风情况下,圆型温度传感器阵列的温度场呈高斯分布,便于风向计算,因此文章设计为圆型阵列。图1为阵列结构,该阵列包括1个中心加热源、位于4个同心环中的32个温度传感器(1个4×8阵列)和底部基座。中心加热源为1个恒定温度值为150 ℃的加热棒,外围4个同心环等距分布,每个环上的8个温度传感器间的角间距均为45°。

图1 圆型阵列热式测风仪阵列结构
2.2 流体仿真
为验证圆型热式测风仪测风原理的可行性,在实际测量前搭建模型进行流体仿真实验:首先在Space Claim 软件中建立圆型阵列模型,然后将其导入Meshing软件规划四面体网格,最后导入FLUENT软件,选用k-e模型并开启能量交换选项,开始流体仿真实验[6]。
当环境风速设置为0 m/s时,圆型阵列的温度场以热源为中心呈对称分布,即每一环的每个温度传感器的示值相等,且温度值由内圈向外圈逐圈递减。
当环境风速设置为大于0 m/s时,风从任意方向吹向圆型阵列,经中心恒温热源带走热源的部分热量,使各温度传感器形成一个明显的温度差,最内圈差值尤为明显,且温度值呈现明显的高斯分布,因此最内圈温度值可以作为判断风向的重要依据。由温度场仿真可得,在1 m/s、4 m/s、7 m/s风速下,内侧迎风向温度传感器最高值分别为88 ℃、64.38 ℃和38.86 ℃,表明在相同环境温度下,风速越大,外围温度传感器的值越低,带走的热量也就越多。
设定恒定风速3 m/s,环境温度分别为-10 ℃、10 ℃、30 ℃进行温度场仿真。由于风速大于0 m/s,风经过中心恒温热源,温度场呈现非对称分布。环境温度为-10 ℃、10 ℃、30 ℃时,内侧迎风向温度传感器最高值分别为66 ℃、78 ℃、90 ℃,仿真结果表明,虽然风速相同,但环境温度会影响温度传感器示数,即会影响测风仪的测量精度,且环境温度越高,传感器示数越大,呈正比关系,与恒定环境温度、不同风速仿真结果相反。
由于环境温度会影响测风仪的测量精度,仿真时设定环境温度分别为-10 ℃、0 ℃、10 ℃、20 ℃、30 ℃、40 ℃,风速分别为0.5 m/s、1 m/s、1.5 m/s、2 m/s,…,6 m/s,仿真在不同温度、不同风速下的圆型阵列温度场分布情况。从温度传感器平均值与风速、环境温度值的拟合曲线可知,风速与传感器平均温度有强相关性,当环境温度相同时,风速越大,传感器平均温度值越小,因此根据热源周围一定空间内的温度场分布,即可反演出风速V,验证了热式测风原理的可行性。另外,受环境温度影响,同一风速在不同环境温度下传感器平均温度值不同,环境温度越高,平均温度越高,因此可采取温漂补偿算法补偿热式测风仪的温度漂移,从而提高测量精度。
2.3 风速风向计算方法
图2为圆型阵列测风仪在恒定流速和不同风向角(0°、45°、90°、180°)下的温度分布,由图2可知,圆型阵列测风仪中间加热源周围的外围温度分布由内向外类似于高斯分布函数,且越在风向上的风温度越高。因此只要检测出高斯曲线的峰值,如图3所示,即可确定风的流动方向。当任一方向的风吹过测风仪时,最内圈不同角度的温度传感器与温度传感器数值之间的关系可用高斯函数表示为:

图2 恒定流速和不同风向角下的温度分布
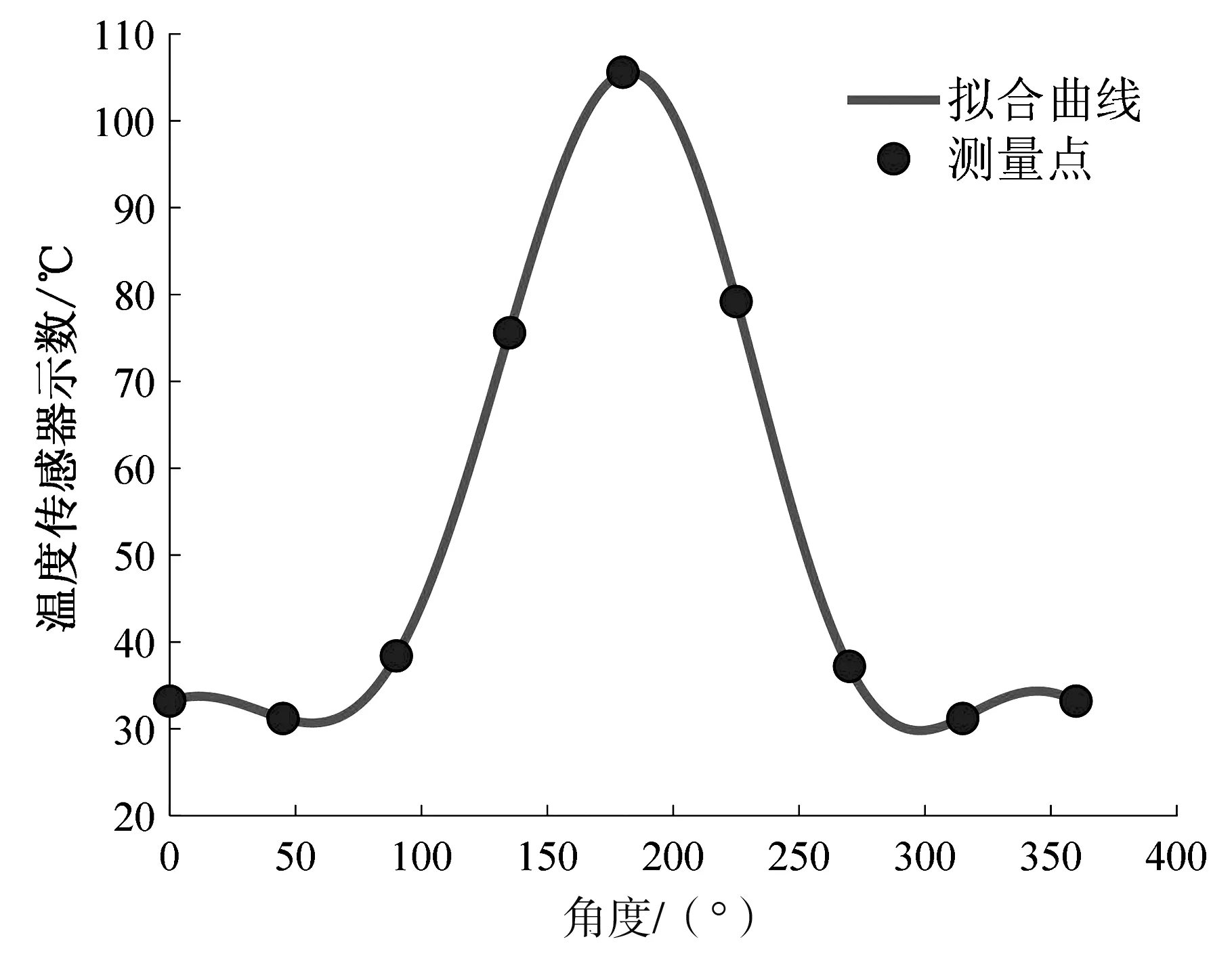
图3 高斯分布曲线
(4)
式中,(θi,yi)(i=1,2,3,…,8)为不同角度的温度传感器θi对应的温度示数值yi;ymax、θmax和S分别为高斯曲线的峰值、峰值位置和半宽度信息,ymax、θmax代表最高的温度传感器示数和该传感器所对应的角度位置。对式(4)两边取自然对数,化为:
(5)
令:
(6)
式(6)化为矩阵形式可表示为:
(7)
式(7)可记为:
Z=XB
(8)
根据最小二乘原理,构成的矩阵B的广义最小二乘解为:
B=(XTX)-1XTZ
(9)
最后根据式(6)即可求出参数ymax和θmax,从而确定风的流动方向。

2.4 温漂补偿算法
在实际测量中,各种外部因素会对测风仪的精度造成一定影响,其中环境温度是最主要的影响。由于BP神经网络算法对非线性复杂函数具有较好的处理能力,而遗传算法擅长全局寻优,两种算法相结合效果很好,因此文章提出遗传算法优化BP神经网络算法补偿热式测风仪的温度漂移[7]。
BP神经网络在当前各个领域都有广泛的应用,是一种误差逆向传播的多层前馈网络[8,9]。一般由输入层、隐含层和输出层组成,网络训练的每个样本由输入层输入,经隐含层处理后作用于输出层,若网络输出量与期望输出量之间存在误差,则通过调整网络权值与阈值进行反向操作,直至误差在最小范围内。热式测风仪所测风速由环境温度与温度传感器平均温度值得到,设定环境温度、温度传感器平均值为BP神经网络模型的输入参数,则输入节点数为2,根据多次试验,当神经网络输入节点数为n,网络的隐含层节点数为2n+1时,网络模型效果最好,故隐含层节点数为5,综上,文章设定BP神经网络模型为2-5-1结构,如图4所示。

图4 BP神经网络模型结构
但BP神经网络算法存在收敛速度慢、输出层易陷入局部极小值等缺点。遗传算法(Genetic Algorithm,GA)是一种模拟生物在自然界中的遗传机制和进化规则而形成的全局寻优搜索算法,具有强鲁棒性、并行性和全局寻优性,故将两种算法相结合,利用遗传算法优化BP神经网络所需的权值与阈值,再进行BP神经网络求解,从而达到全局寻优与快速收敛的效果。具体的操作流程包括种群初始化、适应度函数、选择操作、交叉操作和变异操作。
3 实测数据采集与分析
3.1 系统设计
系统总体结构如图5所示,多元温度传感器阵列由32个德国进口二线制A级PT100温度传感器组成。选用ADS7793完成对温度信号的预处理、放大以及AD转换后,传输至STM32F103单片机,通过烧写单片机的风速、风向和温漂补偿算法,求解出实时风速、风向,最后将风速风向数据发送至上位机。
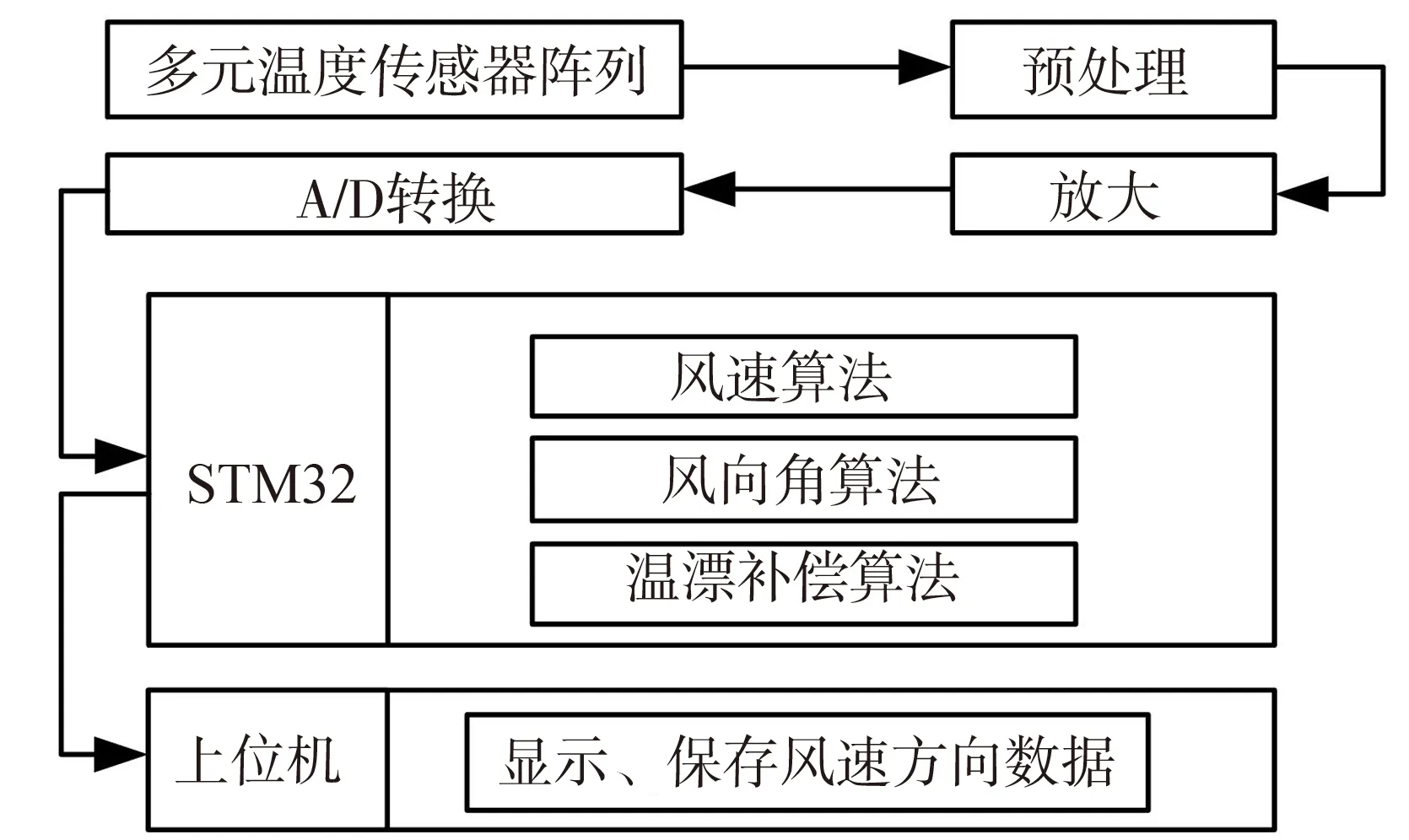
图5 系统总体结构框图
3.2 实验平台搭建
利用该热式测风仪搭建测风平台,该测风平台包括高低温试验箱、可调速鼓风机、热式测风仪和上位机。可调速鼓风机用于模拟风速,风向口正对温度传感器阵列;高低温实验箱用于模拟环境温度,其工作范围为-60~120 ℃;采集的数据由RS-232串口发送至上位机。
3.3 数据拟合分析
设定环境温度分别为-10 ℃、0 ℃、10 ℃、20 ℃、30 ℃、40 ℃,风速分别为0.5 m/s、1 m/s、1.5 m/s、2 m/s、2.5 m/s、3 m/s、3.5 m/s、4 m/s、4.5 m/s、5 m/s、5.5 m/s、6 m/s,将288次试验所测得的32个温度传感器平均温度值拟合为曲线。设环境温度为x,温度传感器平均温度值为y,风速为z,若不采用补偿算法,其拟合函数为:
(10)
式中,p1=10.8945,p2=0.6475,p3=-1.019,p4=0.0055,p5=-0.2575,p6=0.0012,p7=0.227,p8=0.0002,p9=-2.5708e-5。
流体仿真中圆型阵列热式测风仪温度传感器平均温度值、环境温度、风速呈线性关系,但实际数据采集中由于环境温度、加热棒与各环温度传感器之间无法预测的传热等因素,三者呈非线性关系。因此采用遗传算法优化BP神经网络算法对测风仪的温度漂移进行补偿。
4 基于GA-BP神经网络算法的处理结果分析
选取52个样本为训练样本,20个样本为测试样本,得到的GA-BP神经网路预测输出与期望输出比较图如图6所示。验证了遗传算法优化BP神经网络效果较好。

图6 GA-BP神经网路预测输出与期望输出比较
由训练好的BP神经网络可得出拟合公式:
(11)

Wki=(-0.6341 0.1724 0.9141 -0.1667 -0.8499)
bk=0.0631
5 实际测量效果
文章描述了圆型阵列热式测风仪的风向测量方法,采用高斯分布函数确定风向角,由于最内环温度传感器示数始终是最大值,因此仅用最内环温度值评估风向角。对于风速值的测量,根据32个温度传感器的平均值反演出实时风速,并经遗传算法优化BP神经网络进行补偿,为准确验证该测风仪测量结果是否准确,文章分室内和室外两种环境对风速风向进行测量。
1)室内测量。室内环境较为稳定,因此先在实验室搭建平台进行实际测量,用可调速鼓风机模拟风速,测得的数据通过RS-232串口发送至上位机,与标准风速仪的结果进行对比。
2)室外测量。选取不同时间段进行室外测量,为准确验证测风仪的精确度,选取环境温度和风速不同的时间段,同样记录每一环温度传感器示数。
通过对比室内值与室外值可知,室外值由于受各种不稳定环境因素的影响,测量精度低于室内。且风速越低时,风速相对误差越大,大于10%;风速越高时,相对误差较小,可控制在10%以内。风向角测量精度较高,在5%以内。实验结果表明,圆型阵列热式测风仪测量效果较好。
6 结束语
文章针对目前市场上销售的热式测风仪存在的弊端,提出了一种新型采用温度传感器阵列测量风速风向的方法。圆型阵列采用32个PT100温度传感器,呈4×8阵列形式均匀分布于每一环上,由于圆型阵列温度场分布类似于高斯分布函数,只要根据高斯分布函数的峰值即可求得风向,32个温度传感器的平均值用于评估风速。且针对环境温度会影响热式测风仪测量精度这一问题,文章提出了遗传算法优化BP神经算法补偿测风仪的温度漂移。室内外实测结果表明,在风速越低时,风速相对误差越大;风速越高时,相对误差较小,实际测量结果较为理想。
文章列举了在流场仿真时存在的一些不足,温度传感器示数稳定需要一段时间,可能会影响测量精度;加热棒采用的是PID模块控制,精度不够,加热棒温度可能不恒定,会有上下波动偏差;提出了圆型阵列形式的热式测风仪,可能会有更简便、更精确的阵列形式,实验具有一定偶然性,下一阶段的学习中可以尝试更多的阵列形式,在今后的学习中还将继续完善。
