基于无人机的光伏电站智能巡检
2022-05-23叶海瑞李艺达
王 浩,闫 号,叶海瑞,柏 嵩,李艺达
〈红外应用〉
基于无人机的光伏电站智能巡检
王 浩1,闫 号2,叶海瑞3,柏 嵩3,李艺达2
(1. 国家电投集团江苏电力有限公司,江苏 南京 210000;2. 南京航空航天大学 机电学院,江苏 南京 210000; 3. 国家电投集团江苏新能源有限公司,江苏 盐城 224000)
太阳能光伏发电是国家能源结构性调整的重要组成部分,近几年随着光伏发电产业规模迅速扩张,光伏电站的日常运维压力日益增加。针对光伏电站面积大、人工检测效率低等问题,文章对基于无人机的光伏电站智能巡检技术进行研究,提出了一个基于无人机的光伏电站智能巡检完整技术路线,实现了光伏面板图像数据自动化采集与分析,并对基于计算机视觉的缺陷检测方法进行研究,采用自适应动态阈值法并结合图像增强技术,基于红外图像实现了鲁棒的光伏面板缺陷检测,结合可见光数据实现缺陷类型判别,进一步根据相机POS数据及相机模型解算缺陷坐标,实现缺陷定位,并在实际场景中验证了所提出技术路线的有效性。
无人机;光伏电站;缺陷检测;智能巡检
0 引言
太阳能作为一种来源广泛的清洁能源,近年来在国内得到了充分的重视,光伏发电产业已经达到了一定的规模[1-2]。巨大的光伏发电面积对光伏面板的日常巡检工作提出了很大的挑战。光伏面板作为光伏发电系统的核心组成部分,在日常的运行中长期暴露在自然环境下,不可避免会产生各种缺陷,如隐裂、遮挡、碎裂等等,及时发现面板缺陷并进行人工干预对保障电站的发电效率有重要意义[3]。
传统的方法主要是对面板的发电电流进行监测[4],当发电功率异常则可能存在面板缺陷。由于成本的限制,这种方法只能将故障限定在一定范围内,准确的故障定位还需要依赖人工排查,检测效率低,劳动量大。尤其针对渔光互补光伏电站,电站和鱼塘的结合有效提高了空间的利用率,但同时也对光伏面板的巡检造成了更大的困难。
为了解决上述问题,国内外学者进行了广泛研究。陆成龙[5]等进行无人机智能巡检系统硬件以及软件平台设计,根据损伤尺寸理论实现了对风电光伏的检测;王栓虎[6]等分析了无人机相对于传统光伏电站运维模式的优势;但他们仅仅提供了关于应用研究,并未给出具体缺陷检测方法。赵玲玲[7]等提出了一种基于HSV空间模型的图像分割及检测的光伏面板缺陷检测技术,能有效地对复杂背景下的光伏图像进行区域分割与检测;李香凡[8]等提出了一种基于金字塔图像序列的数据增强方法,该方法可以在不增加噪声的情况下最大程度地增加小目标的训练样本;Gabriele Roggi[9]等提出了一种基于视觉的引导光伏电站分析测试自动检测方法,并通过测验证明了其有效性;但他们所提出的方法存在对光照变化鲁棒性不强,检测效率低,不能满足实时性要求的问题。
本文提出一种基于无人机的光伏电站智能巡检方法,巡检方法首先利用无人机搭载多光谱相机进行高效的数据采集,然后对采集到的红外图像数据进行自动化分析处理,快速检出并定位缺陷,再结合可见光图像对缺陷类型进行判别,指导电站运维人员对缺陷面板采取适当的手段进行修复。
1 无人机智能巡检技术路线
基于无人机的光伏面板智能巡检系统包含软、硬件模块,其中,由无人机飞行平台及云台相机共同构成了数据采集硬件平台,结合航线自动规划技术组成了数据采集子系统;缺陷识别与缺陷定位模块组成了数据分析子系统。
如图1,使用大疆经纬M300RTK作为无人机飞行平台,该飞行平台基于实时动态测量(Real Time Kinematic,RTK)技术可实现厘米级精确定位,单架次续航时间超过45min,为任务高效可靠执行提供了有效保障。平台搭载大疆禅思H20T云台相机,该云台相机由一个广角相机、一个变焦相机、一个红外相机和一个激光测距传感器组成,其中可见光变焦相机有效分辨率为2000万像素,可实现23倍光学混合变焦,红外成像相机分辨率640×512像素,热灵敏度<50mK,可以较好满足任务对图像质量的要求。利用该云台相机可同时获取视场相似的红外和可见光图像,为缺陷检测与缺陷类型判别提供了很大的便利。
如图2(a)所示为无人机执行自动化数据采集任务,图2(b)、(c)分别为采集到的红外和可见光正射图像。

图1 数据采集硬件平台
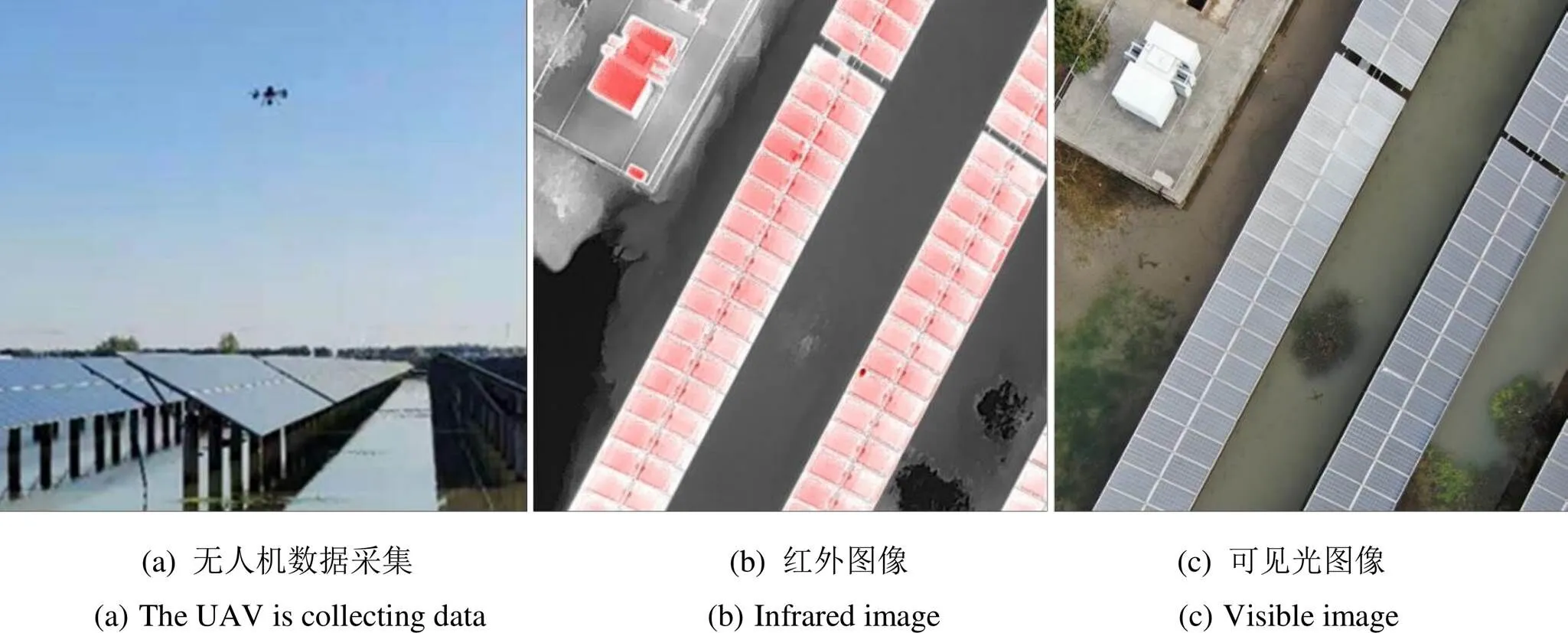
图2 无人机数据采集
智能巡检流程如图3所示:首先划定光伏面板区域,根据镜头参数、设定的飞行高度、画面重叠率等参数,由算法自动生成任务航线,然后由无人机搭载红外热成像相机和可见光相机进行自主数据采集;对采集到的图像数据进行分析处理,基于红外图像进行面板热斑的检测与分割,然后结合可见光图像对造成热斑区域进行缺陷判别,最后根据照片位置与姿态系统(position and orientation system,POS)数据与相机成像模型实现缺陷定位。
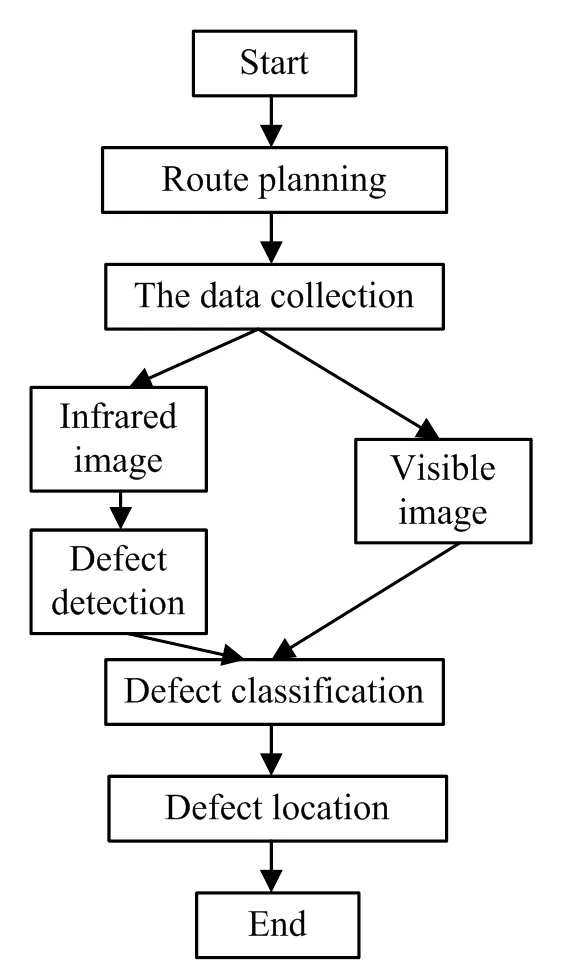
图3 巡检系统工作流程图
2 缺陷检测与定位
2.1 缺陷检测
从红外图像中识别出热斑区域可以划归为计算机视觉中的目标检测任务。近年来随着人工智能的快速发展,基于深度学习的目标检测已经在各行业领域得到广泛的应用[10]。但是基于深度学习的方法依赖于大量人工标注的数据,数据准备工作量大,且算法执行效率较低。因此,本文提出一种自适应动态阈值分割的方法进行缺陷检测。算法主要分为3步,分别是预处理、热斑分割提取以及异常原因判断。算法流程如图4。
由于基于无人机的缺陷采集单元是无人机在航线飞行过程中等时间或者等间距进行拍照,采集到的数据会存在较多的背景,背景的存在会对缺陷检测的效率和识别率带来一定的影响,因此,首先通过大津法[11]对图像进行前景分割提取。如图5,可以看出光伏面板的灰度值与水面等背景的灰度值相差较大,按照大津法求得的分割阈值可以使前景与背景图像的类间方差最大,类间方差可表示为:
=0(0-)2+1(1-)2(1)
式中:0,1分别为前景像素点数和背景像素点数占整幅图像的比例;0和1分别为前景像素和背景像素的平均灰度;为整幅图像的平均灰度,可表示为:
=00+11(2)
将式(2)代入式(1)可得:
=01(0-1)2(3)
采用遍历的方法得到使最大的阈值即为所求。大津法分割结果如图6(b),图6(a)是其对应的红外图像。
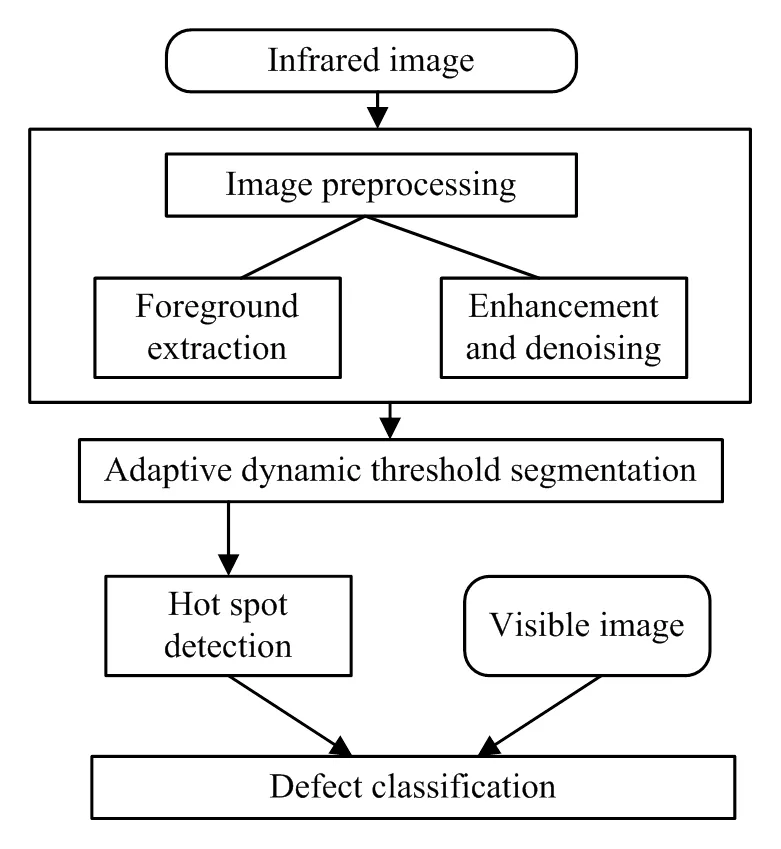
图4 缺陷检测算法流程
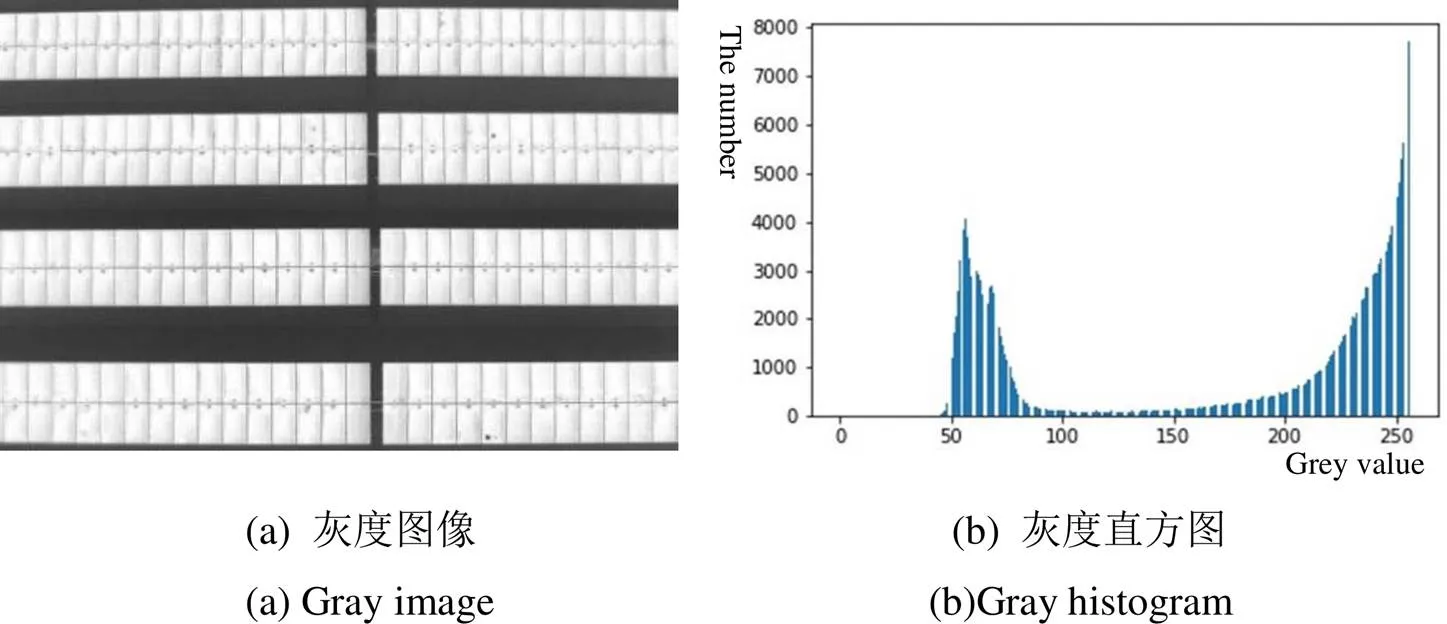
图5 红外数据的灰度图及灰度直方图
通过图6(b)可以看出,分割后的二值图像存在斑点噪声、边界不平滑等问题,因此需要进一步地开运算、闭运算处理[12]得到完整的前景和背景区域。开运算是先腐蚀后膨胀的操作,可以平滑边界,去除背景区域的噪声;闭运算可以填补前景区域的孔洞,如图6(c)所示。
在前处理结束后,为了提高缺陷识别率,需要对原图像进行图像增强,达到凸显缺陷并抑制噪声的目的,具体地,包括以下步骤:
1)选用3像素×3像素的结构元作为计算增强系数的局部窗口。
2)计算窗口内中心点周围8个像素点的均值(mean)和标准差(dev),如下式:

式中:X代表中心像素点的8邻域。
3)计算窗口增强系数F。作为中心像素点的新像素。

图像增强处理后,采用一种自适应动态阈值的方法完成红外图像热斑的分割提取。该方法为每个像素点计算一个阈值,首先在15×15的局部窗口进行运算,计算每个窗口中像素的高斯加权和,然后减去动态阈值即得到该点的阈值。动态阈值(i,j)确定方法如下:
(i,j)=max(dev(i,j),) (7)
式中:dev为标准差因子用于调整标准差对局部噪声的灵敏度,不能较高或较低,否则会导致不能提取缺陷或提取整张图片为缺陷,一般取-1至1;为绝对动态阈值,在灰度值均匀区域,局部标准差较低,为了降低单个灰度值影响,可调整的值从而忽略均匀环境的灰度值。则缺陷区域分割可表示为:
式中:(i,j)为该像素点的高斯加权和,自适应动态阈值分割效果如图6(d),进行闭运算处理得到如图6(e)。将图6(c)与图6(e)进行数学运算,计算方式为将图6(c)中像素为0的区域赋值为1,像素为1的区域与图6(e)相乘。得到结果如图6(f),检测黑色像素标出并映射到原图上,效果如图6(g),即为识别的热斑位置。
与前景提取所采用的大津法关注全局灰度值不同,自适应动态阈值分割只关注局部灰度差异,为每个像素点计算单独的阈值,可以降低光强随天气变化导致成像差异带来的影响,提高缺陷识别率。
在红外图像中检测出热斑区域后,根据红外图像和可见光图像的对应关系,结合可见光图像对热斑区域的缺陷类型进行判别,包括内部缺陷、碎裂或者异物遮挡,帮助运维人员快速确定维修方案,包括清洗、维修和更换。
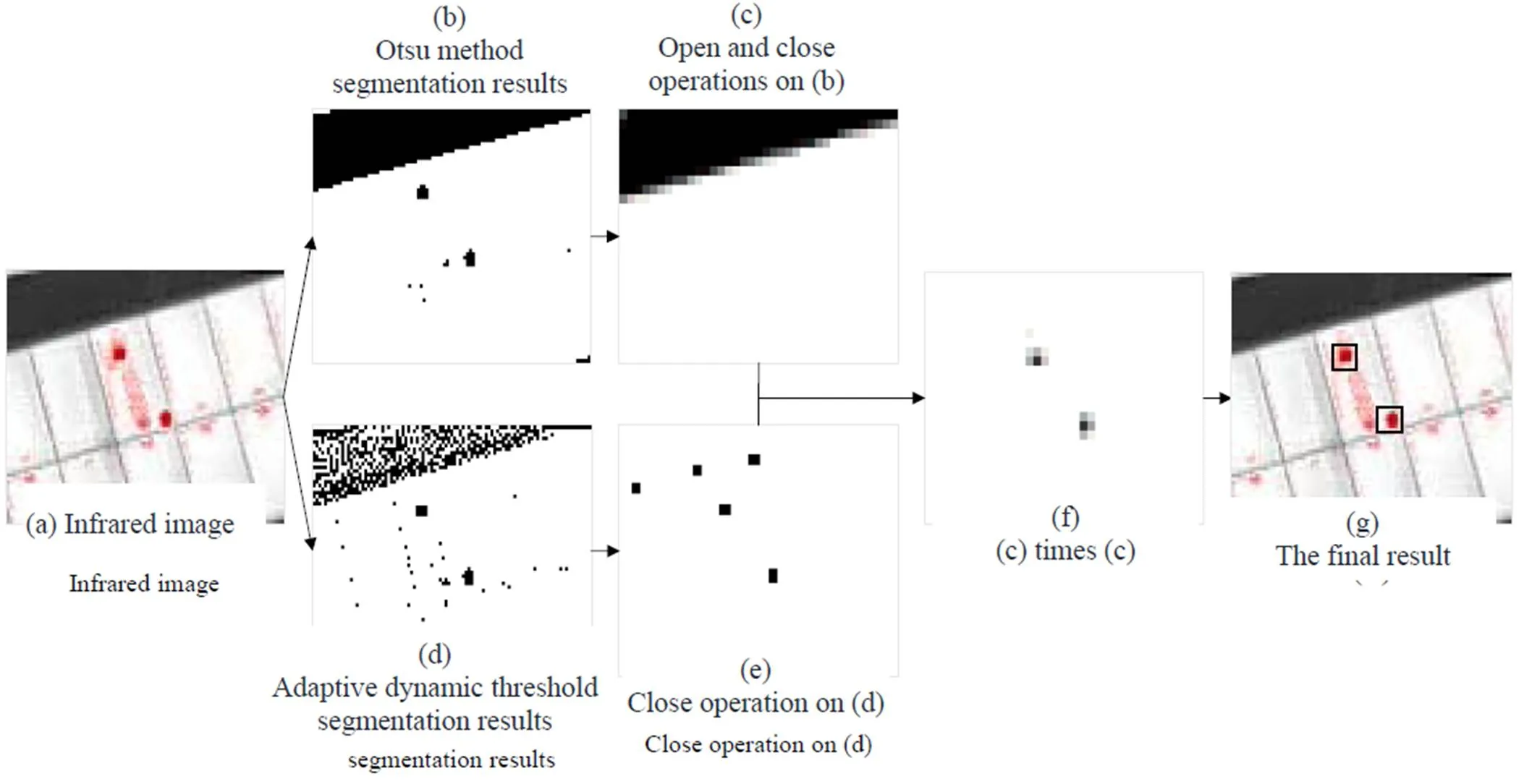
图6 检测算法处理过程
2.2 缺陷定位
为了将图像中检出的缺陷定位到真实地理坐标系中,需要实现缺陷区域从图像坐标系到地理坐标系的映射。如图7所示,缺陷在图像坐标系中的坐标为(,),在地心地固坐标系ECEF中的坐标为E(E,E,E),存在如下变换关系:

图7 缺陷定位坐标关系示意
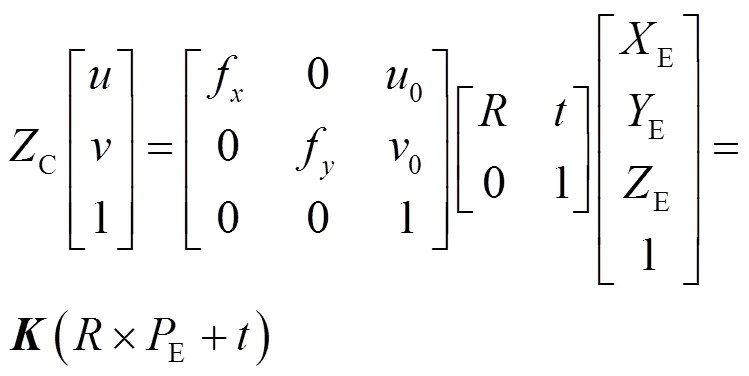
式中:和分别是地心地固坐标系坐标系ECEF到相机坐标系C的旋转和平移,可将E(E,E,E)从ECEF坐标系转换到相机坐标系C,和可由拍摄照片时相机的POS数据求解得到;矩阵为相机的内参矩阵,通过矩阵可将相机坐标系下的空间点投影到像素坐标系上,可以通过相机标定得到。因此通过公式(3)~(11)逆映射即可将图像中检测出的缺陷转换到地理坐标系下,实现缺陷定位。
3 试验结果
本文提出的智能巡检技术路线试验在建湖渔光互补光伏电站进行。渔光互补光伏发电技术作为一种把光伏面板建在池塘上的技术手段[13],通过池塘养鱼、光伏面板发电达到资源的更充分利用,但同时也对传统运维手段提出了很大的挑战,因此基于无人机的智能巡检技术具有很大的发展空间。
如图8为部分航线示意图,其中划定的巡检区域面积接近200000m2,规划航线总长度超过10000m,预计任务总时长约1h,可在两个架次内完成数据采集任务。
使用所提出的方法可在3min内完成对采集到的1200余张照片进行分析处理,如图9为部分处理结果。
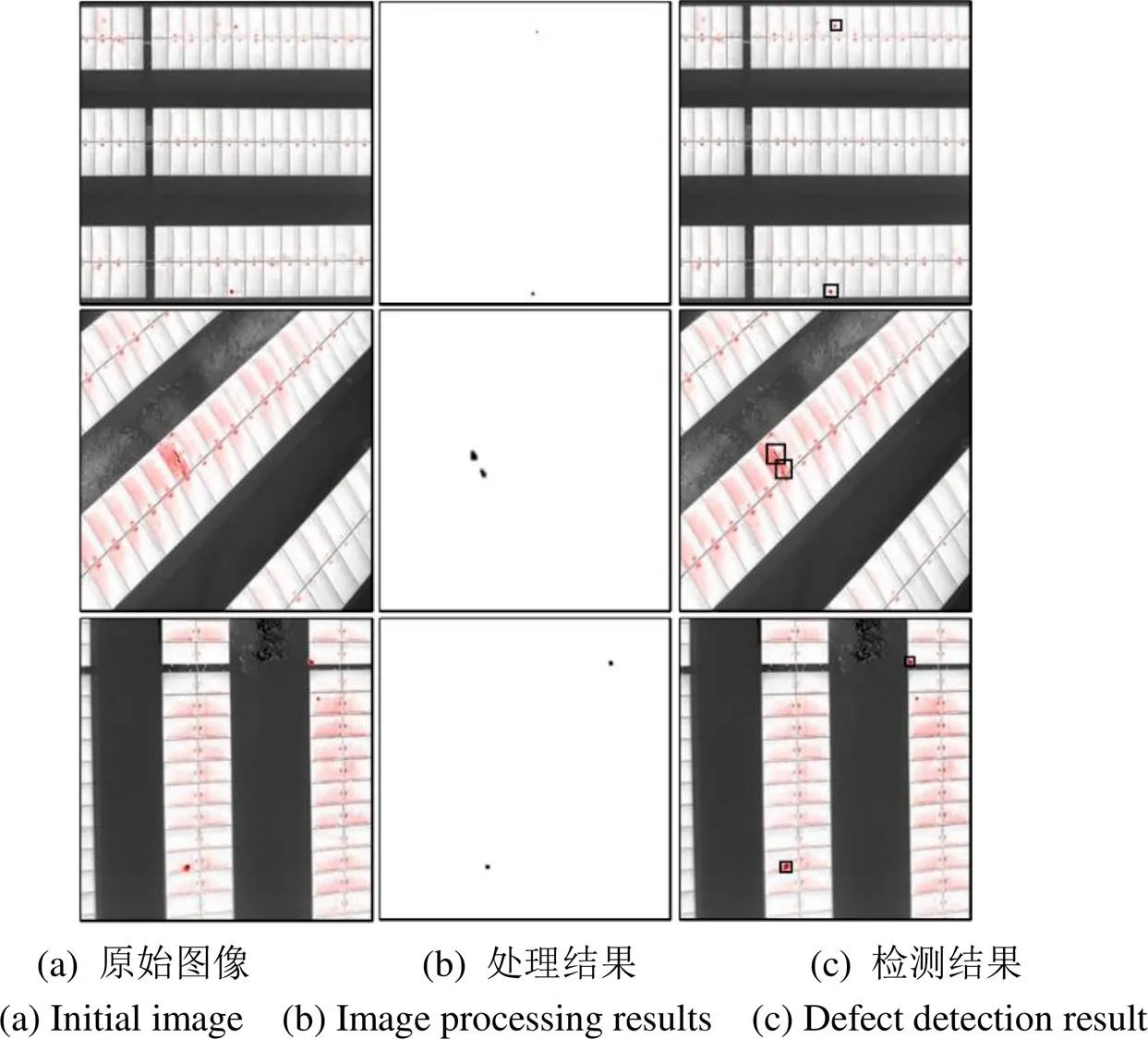
图9 部分缺陷检测结果
对检测结果进行统计,如表1所示。可以看出,本文方法对热斑区域的检出率高于95%,满足实际工程应用需求,且效率远远超过传统巡检方式。

表1 缺陷检测统计结果
4 结论
本文提出了一种完整的基于无人机的光伏电站智能巡检技术路线,所述方法是完整地,可直接用于光伏电站运维管理;搭建了无人机图像数据采集平台,利用机器视觉技术实现光伏面板缺陷检测与定位。文章将基于图像处理的方法应用到光伏面板缺陷检测中,能够有效检出、定位和分类缺陷,相比深度学习的方法更加高效、贴合实际运维场景要求。并在实践中从巡检效率和精度方面对所提出的技术路线及方法进行了试验,验证了方法在实际应用场景中的有效性。
[1] 彭向阳, 钱金菊, 吴功平, 等. 架空输电线路机器人全自主巡检系统及示范应用[J]. 高电压技术, 2017, 43(8): 2582-2591.
PENG Xiangyang, QIAN Jinju, WU Gongping, et al. Full automatic inspection system and its demonstration application based on robot for overhead transmission lines[J]., 2017, 43(8): 2582-2591.
[2] 黄山, 吴振升, 任志刚, 等. 电力智能巡检机器人研究综述[J]. 电测与仪表, 2020, 57(2): 26-38.
HUANG Shan, WU Zhensheng, REN Zhigang, et al. Review of electric power intelligent inspection robot[J]., 2020, 57(2): 26-38.
[3] 王培珍, 郑诗程. 基于红外图像的太阳能光伏阵列故障分析[J]. 太阳能学报, 2010, 31(2): 197–202.
WANG Peizhen, ZHENG Shicheng. Fault analysis of photovoltaic array based on infrared image[J]., 2010, 31(2): 197-202.
[4] 闫萍, 王赶强. 电致发光成像测试晶体硅光伏组件缺陷的方法标准解读[J]. 标准化研究, 2020(9): 29-31.
YAN Ping, WANG Ganqiang. Interpretation of standard for test method for cell defects in crystalline silicon photovoltaic modules by electroluminescence (EL) imaging[J]., 2020(9): 29-31.
[5] 陆成龙, 刘忠德, 张皖军, 等. 无人机智能巡检在检测风电光伏故障中的应用研究[J]. 电子设计工程, 2021, 29(6): 130-134.
LU Chenglong, LIU Zhongde, ZHANG Wanjun, et al. Research on the application of UAV intelligent inspection in the detection of wind power photovoltaic fault[J]., 2021, 29(6): 130-134.
[6] 王栓虎, 温向炜. 无人机在光伏组件巡视检查中的应用分析[J]. 太阳能, 2021(1): 51-54.
WANG Shuanhu, WEN Xiangwei. Application analysis of unmanned aerial vehicle in pv modules inspection[J]., 2021(1): 51-54.
[7] 赵玲玲, 汪烨, 刘俊. 基于无人机与HSV空间的光伏电池板检测分析[J]. 红外技术, 2020, 42(10): 978-982.
ZHAO Lingling, WANG Ye, LIU Jun. Detection and analysis of photovoltaic panels based on UAV and HSV space[J]., 2020, 42(10): 978-982.
[8] 李香凡, 唐志伟, 胡家龙, 等. 无人机光伏巡检的图像目标检测算法[J]. 电子世界, 2020(11): 7-8.
LI Xiangfan, TANG Zhiwei, HU Jialong, et al. Image target detection algorithm of UAV photovoltaic inspection[J]., 2020(11): 7-8.
[9] Roggi G , Niccolai A , Grimaccia F , et al. A computer vision line-tracking algorithm for automatic UAV photovoltaic plants monitoring applications[J]., 2020, 13(4): 1-15.
[10] 金映谷, 张涛, 杨亚宁, 等. 基于深度学习的产品缺陷检测方法综述[J]. 大连民族大学学报, 2020, 22(5): 420-427.
JIN Yinggu, ZHANG Tao, YANG Yaning, et al. Review of product defect detection methods based on deep learning[J]., 2020, 22(5): 420-427.
[11] Otsu N. A threshold selection method from gray-level histograms[J]., 2007, 9(1): 62-66
[12] Natale F, Boato G. Detecting morphological filtering of binary images[J]., 2017, 12(5): 1207-1217.
[13] 徐立波. 渔光互补光伏发电系统设计[J]. 科技风, 2020(33): 3-4.
XU Libo. Design of fishing light complementary photovoltaic power generation system[J]., 2020(33): 3-4.
Intelligent Patrol Inspection of Photovoltaic Power Station Based on UAVs
WANG Hao1,YAN Hao2,YE Hairui3,BAI Song3,LI Yida2
(1.,,21000,;2.,,21000,;3.,,21000,)
Solar photovoltaic power generation is an important component of a country's energy structural adjustment. With the rapid expansion of the scale of the photovoltaic power generation industry in recent years, the need for an automated daily maintenance of photovoltaic power stations has increased. Traditional manual detection methods are inefficient because photovoltaic power stations are spread over a large area. In this study, we investigate the intelligent inspection technology of a photovoltaic power station based on an unmanned aerial vehicle (UAV). A technical route for an intelligent inspection of a UAV-based photovoltaic power station is proposed. We achieve the automation of photovoltaic panel image data acquisition and analysis and investigate defect detection based on computer vision. We realize photovoltaic panel defect detection based on infrared images using an adaptive dynamic threshold method combined with image enhancement technology, facilitating the classification of defects to be determined by using visible light images. The defect locations are further calculated by combining the POS data and the camera model. Finally, we verify the effectiveness of the proposed technical route in an actual scenario.
UAV, photovoltaic power station, defect detection, intelligent patrol inspection
TN219
A
1001-8891(2022)05-0537-06
2021-07-19;
2021-10-12.
王浩(1986-),男,江苏徐州人,硕士,工程师,主要研究方向:网络通信及信息化。E-mail: wanghao05@spic.com.cn
