基于操纵动作预测的履带车辆载荷谱编制方法与流程
2022-05-22徐保荣王涛梁梓
徐保荣 ,王涛 ,梁梓
(1.63966 部队,北京 100072;2.陆军装甲兵学院 车辆工程系,北京 100072)
0 引言
履带车辆和其他机械系统一样,工作过程中会因环境、任务、工况的不同而承受多变的载荷作用,这些载荷是车辆系统对外部激励和操作的响应,包含幅值、均值、频次、次序等多种要素,这些要素的组合称为载荷谱,它的表现形式多样,可以是数学式、图表,也可以是时历数据。载荷谱是车辆设计的主要依据,如何编制全面反映车辆实际载荷的载荷谱,是履带车辆设计、试验、定型的基本依据。在设计阶段,载荷谱为功能设计提供依据,在统计学意义下给出载荷极限值以及载荷交变规律。在试验阶段,载荷谱为耐久性试验、可靠性试验提供试验台加载载荷。在定型阶段,载荷谱为装备寿命估计提供载荷输入。
当前应用于我国履带车辆设计和考核的载荷数据多是通过专用试验场试验得到的“试验载荷”,且样本量有限;另外,很多事实表明,当前的载荷加载试验存在试验工况与实际使用工况不符、失效形式差异较大的问题。因此,如何利用前期试验数据或实车测量数据,得到足够多的具有各态历经的样本,以及可以代表载荷总体特征的一定长度的载荷样本量,重现实际使用工况以及与使用工况相对应的载荷,编制有效可行的载荷谱,显得十分重要。
本文针对上述问题,通过分析载荷影响因素,提出一种基于操纵动作预测的载荷谱编制方法。该方法以充分体现车辆实际训练任务和快速生成载荷样本为目标,先对训练科目进行任务剖面分解,按照任务剖面构建载荷谱,再通过预测操纵动作,对已知相似工况载荷数据进行序列重组,从而得到载荷样本。最后以某型高速履带车辆的一个典型训练科目为例,验证了该方法的可行性,从而形成了一种能有效关联车辆任务的载荷谱快速编制方法。
1 载荷影响因素分析
为反映试验载荷和实际载荷的差异,以某型履带车辆发动机的载荷参数分布情况,与某系列综合传动装置台架与装车试验的挡位分布情况进行说明。
图1 是该发动机台架试验载荷参数统计图,图2 是该发动机实车载荷参数统计图。由图1 和图2 可见,台架试验载荷与实车试验载荷的分布明显不同。大量统计结果也表明,发动机台架试验中的失效形式与实际使用中的失效形式差异很大。

图1 发动机台架试验载荷参数统计Fig.1 Test load parameter statistics of engine bench
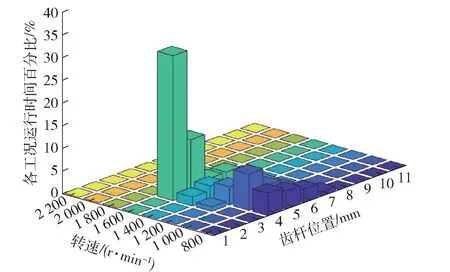
图2 发动机实车载荷参数统计Fig.2 Test load parameter statistics of engine
图3 是某系列综合传动装置台架与装车试验1~6 挡的挡位分布图。图中给出了3 种挡位分布,分别是依据国家军用标准GJB 5210—2003 装甲车辆综合传动装置合架试验方法制定的台架试验挡位占比分布、鉴定阶段装车后实车试验中实车挡位占比分布、鉴定前科研验证试验中实车挡位占比分布。可以看到三者的挡位分布明显不同,因此必然带来载荷分布的差异。

图3 某型车3 阶段中传动系统的挡位分布Fig.3 Distribution of gear shifts for a transmission system
另外,试验载荷谱与实际使用工况对应的载荷谱不一致,未充分考虑因环境和人员不同而引起的载荷变化是主要原因之一。尽管训练大纲、训练教范、场地规范对驾驶员的技术动作和场地的环境特征有相同的要求,但由于人员差异和地域差异,这两个因素产生的影响是不同的。例如,不同等级驾驶员对同一个换挡动作的换挡时机和换挡时间是不同的,这就对同一套传动装置形成了不同的载荷。再如,南方、北方都选择平直土路,由于北方少雨,地面干燥,行驶阻力系数小,而南方多雨,地面湿滑,行驶阻力系数大,因此,即便是同一速度下行驶,行动和传动装置承受的载荷也不同。
人员引起的载荷变化实际上是操作规律的体现,这种规律是操作人员在特定的军事任务中,按照当时的任务需求,针对特定的环境特征,依据自身的决策模型而实施的操作动作。任务需求就是训练大纲、训练教范的要求。操作动作使得车辆在实现动作过程中对外部环境作出响应,进而产生车辆及其部组件的载荷变化。这种关系可以由图4 表示。

图4 车辆载荷成因分析Fig.4 Cause analysis of vehicle load formation
当前的载荷谱编制方法,通常多关注虚线右侧的内容,在几类特定的试验场地中按照指定的试验步骤完成有限里程的小样本试验。实施过程中,试验场地和试验步骤是参照耐久性试验或汽车相关试验制定的,往往带有很强的主观性,对具体的环境和人员因素考虑不足。
从图4 中可以直观地看出,操作规律是融合任务、环境、人员信息后形成的综合体,是体现车辆实际使用工况的关键。因此,一套更加合理的载荷谱编制方法是当前迫切要解决的问题。当车辆状态和任务需求相对确定时,解决问题的关键就是设法明确环境特征和操作规律。
环境特征主要是地域特点和车辆地面作用关系的分析和总结。其他环境因素未体现,只将其产生的影响简单合并为地面条件的变化。
操作规律既涉及任务需求到技术问题的转换,又涉及决策模型逻辑的建立,还涉及环境特征与任务技术需求在决策模型中规则的建立。
2 基于训练科目与决策模型的载荷谱编制方法
2.1 基本思路
首先明确训练科目,然后对训练进行任务剖面分解,最后按照任务剖面构建载荷谱。依据任务剖面形成载荷谱的方法通常有两种;第1 种是使用车辆动力学模型仿真得到载荷的时序数据;第2 种是对相似工况载荷数据进行序列重组得到载荷的时序数据。这里按照第2 种方法进行实现。
任务剖面给出的是车辆意图经过的地理检查点、行为指令、车速约束、时间约束等内容。根据这些内容,结合先验信息,可实现基于任务自动预测车辆路径与动作,然后进行车速预测与动力传动系统操纵预测,再利用谱块选择和谱块拼接程序,可形成符合训练科目的载荷谱。总体技术路线如图5所示。

图5 基于使用想定重构载荷谱的总体技术路线Fig.5 General technical route of load spectrum reconstruction based on scenario
技术实现过程包含以下步骤。
路径规划。依据任务剖面给出的地理检查点,结合道路地图提供的道路信息与可通行区域,利用Dijkstra 路径寻优算法寻找连接相邻地理检查点(局部起点与局部终点)的可行运动路径。
行动规划。依据路径规划得到的运动路径和任务剖面给出的行为指令、车速约束、时间约束,结合电子地图以及地形信息中的高程、障碍拓扑、道路曲率等信息,利用动作预测算法寻找最优的时空路径,形成动作序列,其包含路径点序列以及路径点对应的车辆预测位姿与预测车速。
操纵预测。依据动作预测得到的车速序列,结合操纵动作库中的驾驶操作动作,利用决策模型预测可行的车辆操纵动作,形成操纵序列。
谱块优选。依据车速序列、操纵序列,结合车辆参数、地理信息库、载荷谱库,利用查表法在载荷谱库中选择可行的载荷谱块及其同步的车辆操纵动作,形成载荷谱块序列与操纵动作块序列。
谱块拼接。载荷谱块序列与操纵动作块序列只是具备顺序关系的离散的时历数据集合,要生成试验台加载用的载荷谱与操纵动作序列,应使其具备连续性。这里利用基于梯度的方法对序列中相邻载荷谱块进行光滑过渡连接,基于逻辑推理法对序列中相邻操纵动作块进行连接,形成可用于试验台加载的负载载荷谱和动力传动系统操纵动作序列。
此外,还需要如下一些资源数据,包括地理信息库、操纵动作库、载荷谱块库、车辆参数。
1) 地理信息库。包括道路地图、地形信息和地面条件构建方法研究。道路地图包含道路拓扑信息和可通行区域信息。地形信息描述高程信息,可用于推导坡度。地面条件包含地面类型、土壤参数、不平度、阻力系数等信息。三者之间利用墨卡托投影坐标系关联,统一存储于数据库。
2) 操纵动作库。包括方向盘或操纵杆、油门、制动、换挡等操作。
3) 载荷谱块库。包括动力装置负载、传动装置负载、车速、挡位、方向盘转角或操纵杆位置、油门开度、制动踏板行程、车辆类型、车辆质量、坡度和地面类型。数据库存储动力装置负载与传动装置负载的时历数据。时历数据按照对应的车速、挡位、方向盘转角、油门开度、制动踏板行程、车辆类型、车辆质量、坡度和地面类型建立索引。
4) 车辆参数。包括车辆类型、车身尺寸参数、车辆质量、惯量、动力装置类型、传动装置类型、行动装置类型等信息。
2.2 路径规划方法
驾驶员在驾驶过程中,需要根据路况不断调整行进路径,以到达行进目的地,即路径规划。路径规划就是寻求一条从起始点到目标点的路径,当车辆沿此路径运动时不会与环境物体发生碰撞。路径规划需要预测从起始点经过途经点到达目标点,并且满足约束条件的最优路径。路径规划算法本质上是在解决任意两点的最短路径问题。路径规划分为全局路径规划和局部路径规划。
2.2.1 全局路径规划算法
全局路径规划是依据现有起始点、途经点、目标点及环境信息进行的完整路径规划。采用Dijkstra算法,针对带权有向图(见图6),将起始点定义为源点,目标点定义为,途经点定义为、、、,为权重。最短路径问题则抽象为从源点到带权有向图其余各点的最短路径。Dijkstra 算法按照路径长度排序求出最短路径。
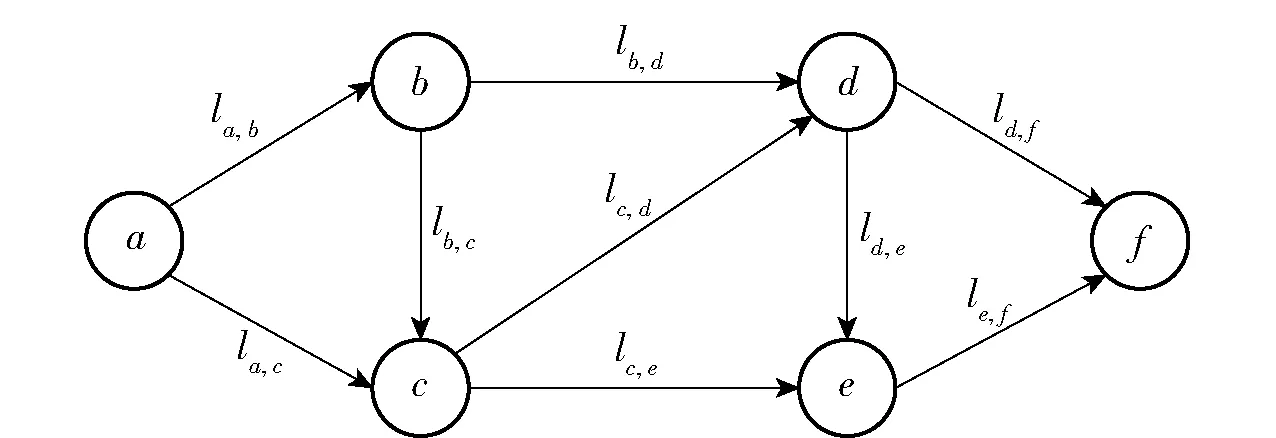
图6 带权有向图Fig.6 Weighted directed graph
2.2.2 局部路径规划
在车辆行进过程中会遇到各种各样的障碍,避障问题是路径规划中的一项主要研究内容,车辆遇到障碍通常需要绕行,使用渐进回归避障方法解决车辆绕开障碍物的路径规划问题。所谓避障,就是车辆在遇到障碍时选择正确的行进方向,绕过障碍区,然后继续向目标点行进。在避障过程中,尽量减少因必须绕行而所走的路程,也就是最短路径原则,因此,车辆必须不断地修正自己的行进方向,力求做到行进方向与目的地方向的偏离度最小。
2.3 行动规划方法
完成路径规划后需要对车辆的行驶方向和速度时刻进行控制,即进行动作预测。车辆行驶方向根据驾驶员期望的转向角度进行预测,车辆行驶速度由驾驶员期望的速度进行预测。
2.3.1 驾驶员期望转向角度
采用两点法进行驾驶员期望转向角度计算,两点法原理如图7 所示。
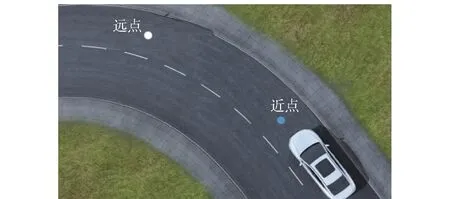
图7 两点法示意图Fig.7 Schematic diagram of two points method
两点法中定义了近点和远点,对应着驾驶员在路上预测到的车辆未来可能行驶到的近处位置和远处位置。车辆转向角度定义为车辆行驶方向线和道路方向线的夹角。那么时刻车辆的转向夹角α可以用(1)式表达:

式中:、和是拟合参数,通过试验数据拟合得到;Δ为远点在Δ时间内的角度变化量;Δ为远点在Δ时间内的角度变化量;为近点在时刻的角度;为设定的一个最大的近点角度,用以限制转向角度过大。
2.3.2 驾驶员期望车速
根据越野车辆训练任务的特点,可以认为驾驶员车辆前方没有其他车辆,此时可以采用车辆在道路上可能达到的最大速度作为驾驶员期望车速。
驾驶员的期望车速用(2)式表示为

式中:为道路容许的最大速度;为车辆容许的最大速度;为执行任务需要的速度。
2.4 操纵动作预测方法
确定了车辆期望转向角度和加速度后,需要确定车辆操纵动作,从而控制车辆运动的方向和速度。
车辆操纵动作需要根据驾驶员意图,结合驾驶员当前时刻可用的操纵资源进行预测。
2.4.1 车辆操纵资源适配
车辆操纵资源是指在某时刻车辆上可以被驾驶员操纵的装置,如制动器、离合器、油门、方向盘等。当驾驶员期望车速与转角产生后,生成新的驾驶操纵任务,并将任务按照权重存入任务队列,然后对任务进行分析,得到需要的车辆操纵资源,同时根据驾驶员状态查询相应操纵资源是否可用,判断是否可执行该操纵任务。
2.4.2 驾驶操纵动作预测
当操纵任务能够执行时,需要根据任务目标来输出操纵动作。操纵动作首先要保证操纵动作的子动作之间满足正确的时序关系,否则,子动作的时序不正确会导致车辆物理模型无法运行或者出错。其次,需要保证操纵动作的幅度正确。对于前者,采用层次任务网络预测的方法解决。
层次任务网络是基于知识的规划技术。它利用任务网络、域描述、状态描述规划任务,任务网络定义了任务队列和约束条件,域描述定义了预测算子、方法等信息,状态描述定义了任务执行前后执行器与环境的状态。
在层次任务网络规划过程中,驾驶操纵动作可以分为原语任务和复合任务,原语任务为操纵单个装置可以完成的任务,符合任务是指需要操纵多个装置才能完成的任务。
2.5 地理信息库构建
驾驶教范中一般对驾驶训练场地有明确的要求,这里将场地要求转换为典型地面特征数据描述、地面模型构建方法研究。地面特征数据按道路类型、地面不平度、车辆与地面作用系数描述,并形成地面模型。地面特征数据按道路类型、地面不平度、车辆与地面作用系数描述。
地面不平度模型通常采用路面功率谱密度的形式表达,用表示路面不平度,根据国家标准GB 7031—1986 车辆振动输入路面平度表示方法的规定,路面功率谱密度()的拟合表达式为

式中:表示空间频率;表示参考空间频率;()表示参考空间频率下的路面谱值;表示频率指数;为路面谱的上限空间频率;为路面谱的下限空间频率。
路面不平度一般认为是均值为0 的各态历经过程,在已经给出路面不平度自功密度函数的情况下,可以用有限个离散空间频率的三角级数来描述路面。
因此对于二维路面,路面不平度可以表示为(4)式,

式中:表示计算中正在使用的正弦波序号;为采用的正弦波总数;n表示第个空间频率;l表示路面纵向位移;Φ表示相角,是个在(0~2π)区间均匀分布且相互独立的随机变量;α表示路面幅值,

n表示第个正弦波的上限空间频率,n表示第个正弦波的下限空间频率,为频率指数。
对于三维路面,路面不平度可用(6)式表示:

式中:l表示路面横向位移,可利用该式构造曲面作为车辆的路面边界。
车辆与地面作用系数,如地面阻力、附着系数等需要通过车辆实车试验获取,利用试验数据建立车辆与地面作用系数的系数库。
2.6 操纵动作库构建
依据2.4.2 节可知,车辆典型操纵任务可分为数字量操作任务、模拟量操作任务、逻辑操作任务和时序操作任务。因此操纵动作库也包含上述任务。
1)典型数字量操作任务,包括电源总开关操作、警报按钮操作、起动按钮操作、变速杆操作。
2)典型模拟量操作任务,包括油门、主离合器、制动器和方向盘或操纵杆的操作。
3)典型逻辑操作任务,包括主离合器与油门的配合、方向盘与油门的配合。
4)典型时序操作任务,包括发动、主离合器起车、制动器踏板制动、联合制动、停车、换高挡、换低挡、一般转向。
2.7 载荷谱块库构建
载荷谱块是指一定车辆状态下有限时间内的车辆载荷谱。谱块中包括动力装置工况、传动装置负载、车速、挡位、方向盘转角、油门开度、制动行程、车辆类型、车辆质量、坡度和地面类型。数据库存储动力装置负载与传动装置负载的时历数据。时历数据按照对应的车速、挡位、方向盘转角或操纵杆位置、油门开度、制动踏板行程、车辆类型、车辆质量、坡度和地面类型建立索引。
载荷谱块可以采用实车试验或虚拟样机试验的方法获取。
1) 实车试验获取载荷谱块
基于实车外场试验,在试验场或训练场,按照训练科目要求实施动作。同时使用传感器采集动力装置工况参数、传动装置转矩、车速等车辆信息,并记录地面条件等环境信息。通过对载荷数据按照操作动作进行分割,进而形成多通道同步载荷数据谱块。
2) 虚拟样机试验获取载荷谱块
基于车辆动力学,针对典型车辆动作进行虚拟试验,得到每个车辆动作的时序载荷谱块。利用多体动力学软件建立履带车辆动力学仿真模型,利用MATLAB 软件生成发动机外特性模型与等级随机路面模型,将发动机模型与路面模型导入多体动力学(MBD)仿真软件,按照指定操作工况仿真得到主动轮转矩时间历程。
仿真计算的主要工作在于建立履带车辆的多体动力学模型,包括定义各部件的物理属性、约束关系、接触关系、导入柔性体文件、驱动力矩定义、构建路面模型。通过对载荷数据按照操作动作分割,进而形成多通道同步载荷数据谱块。
3 方法验证
以某型高速履带车辆的驾驶练习项目“通过“S”形限制路”为例,对本文提出的载荷谱编制方法进行可行性检验。
3.1 任务介绍
假设训练场地属于遍布砂石的无坡度山路,地面不平度使用C~F 级路面近似,地面附着系数取0.5,地面阻力系数取0.06,最大地面转向阻力系数取0.6。
行进路线上设立限宽出入口,布置3 个立桩(空心圆形)作为障碍物,如图8 所示。

图8 出入口与立桩布置图Fig.8 Layout of entrance,exit and piles
3.2 编制流程
1)路径规划
预测路径(实黑曲线)使用车辆质心位置轨迹表示,空心圆形为立桩,实心方形为起点,实心五角形为终点,如图9 所示。

图9 预测路径Fig.9 Prediction path
2)行动规划
根据路径基于行动规划算法和驾驶操作规范,得到车辆行动流程:2 挡起步;2 挡换3 挡;3 挡进入S 形限制路;保持平均速度达到教范规定速度;3 挡右转向跟随路径;3 挡左转向跟随路径;3 挡右转向跟随路径;3 挡左转向跟随路径;3 挡加速离开;制动停车。
3)操纵动作预测
每个行动都是一系列单一操纵动作按照一定时序进行的组合。
以上述行动中“2 挡换3 挡”为例,按照层次任务网络规划对复合任务“2 挡换3 挡”进行动作预测,得到该过程的操纵动作时序为维持油门踏板、松开油门踏板、踏下主离合器踏板、摘2 挡、挂3 挡、松开主离合器踏板、踏下油门踏板、维持油门踏板。通过给操纵动作赋予归一化的水平值,动作序列可按照先后次序形成操纵动作逻辑序列,如图10 所示。
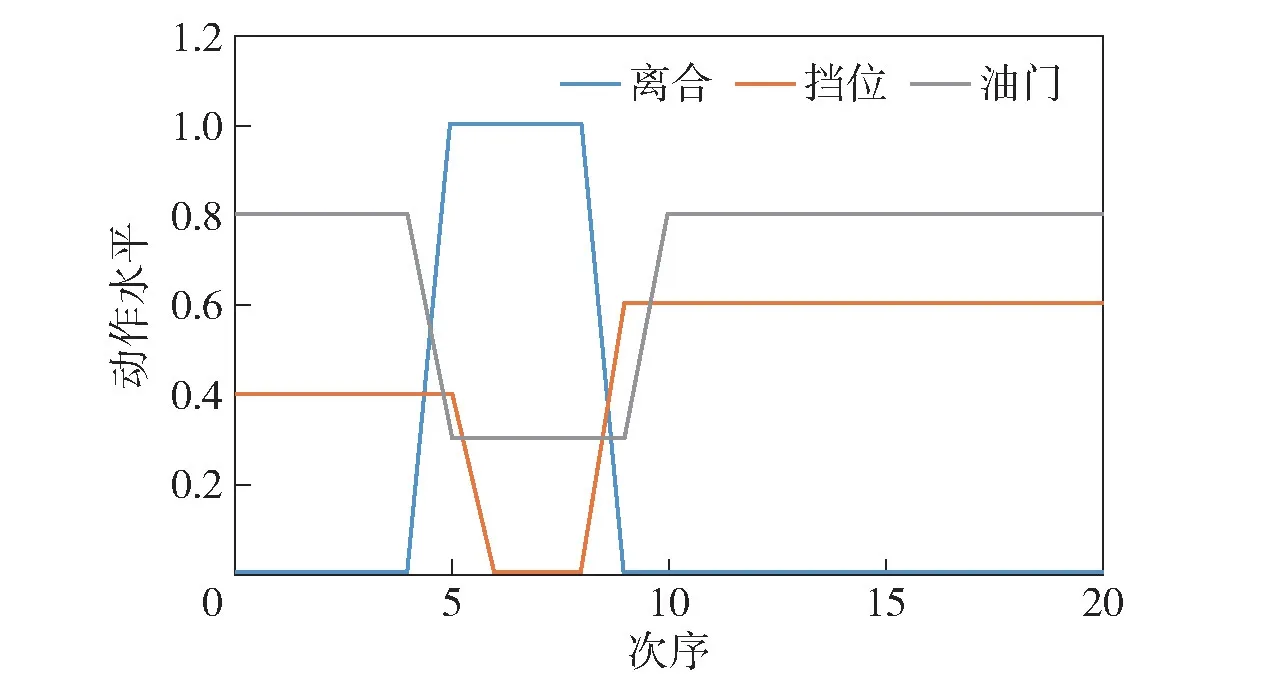
图10 “2 挡换3 挡”操纵动作逻辑序列Fig.10 Logic sequence of“shift from the second gear to the third gear”manipulating action
4)操纵动作块选择
按照操纵动作逻辑序列,从操纵动作库中选择典型时序操作任务“换高挡”,以动作水平为输入查表得到可能的操纵动作块,图11 所示为其中一个可能的“2 挡换3 挡”操纵动作块。

图11 “2 挡换3 挡”操纵动作时序块Fig.11 Time series block of“shift from the second gear to the third gear”manipulating action
5)谱块选择
依据上文4)中选出的操纵动作块从载荷谱块库(基于人在环MBD 仿真数据建立)中找到对应的载荷谱块形成的谱块备选集,以车速和地面阻力系数为输入,查表得到车速偏离最小的载荷谱块,图12 所示为车速偏离最小的“2 挡换3 挡”载荷谱块。
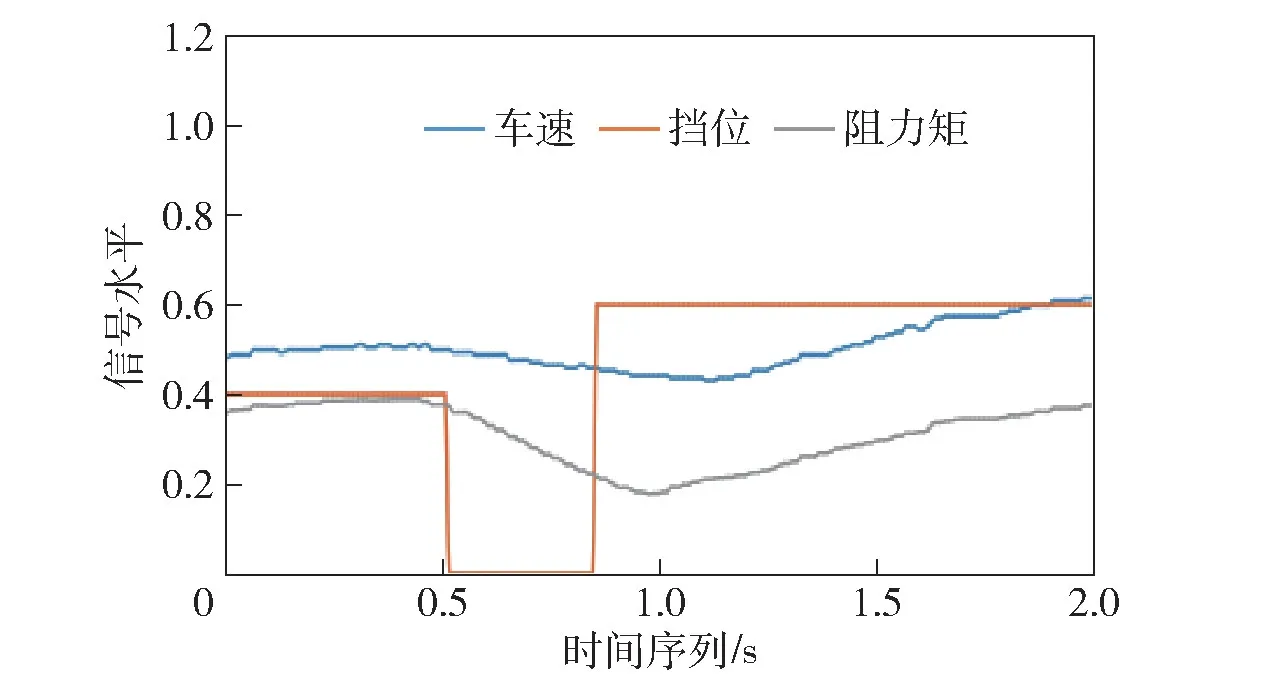
图12 “2 挡换3 挡”载荷谱块Fig.12 Load spectrum block of“shift from the second gear to the third gear”manipulating action
3.3 编制结果
根据单一操纵动作的谱块进行组合形成行动组合,进而形成完整谱块序列。将动作序列拼接生成时序载荷,如图13 所示,可见图13 中显示的两侧主动轮转矩曲线形态符合运动逻辑。
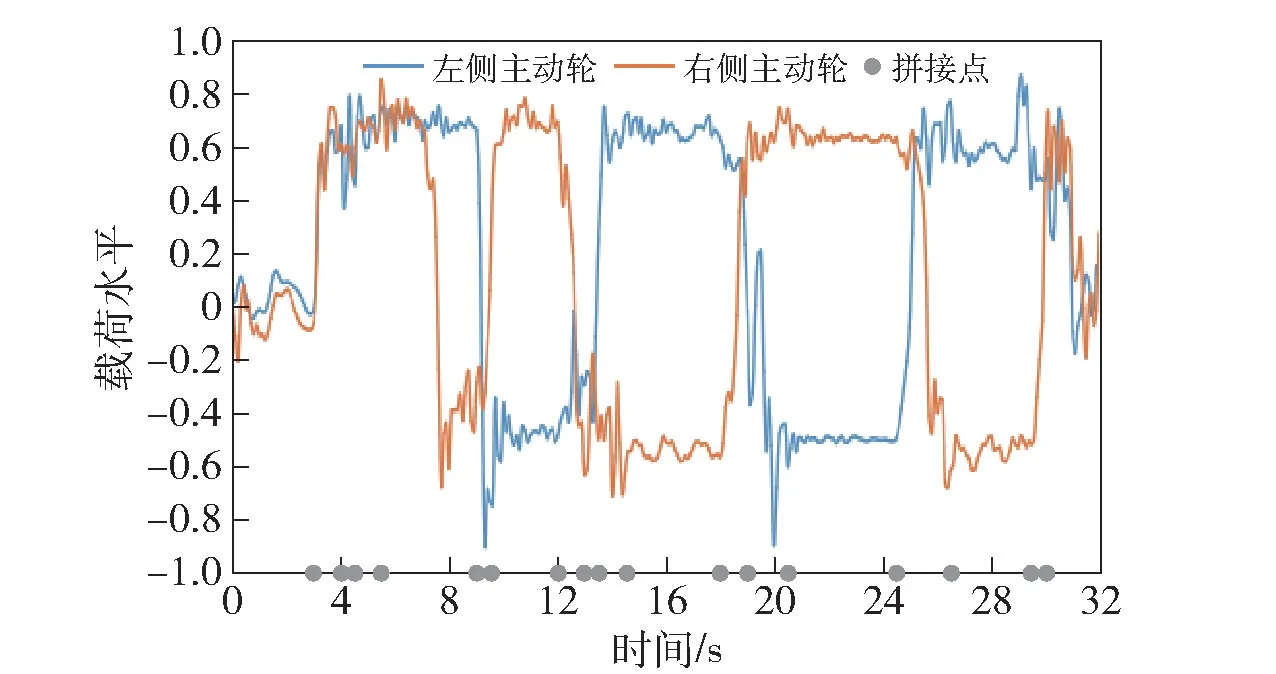
图13 两侧主动轮上的转矩Fig.13 Torques on driving wheels of both sides
为了检验载荷数据对实际工况的复现程度,构建MBD 仿真环境(与构建载荷谱块库的仿真条件一致),将生成的转矩曲线加载到主动轮上驱动车辆仿真模型进行逆向仿真,将逆向仿真得到的路径与预测路径同时绘制于图14 进行对比。由图14 可以看到二者趋势吻合,但在纵向和横向位置都存在偏移,沿纵向位置的横向最大误差为18.3%,横向平均误差为12.7%。

图14 逆向仿真路径与预测路径对比Fig.14 Comparison of reversely simulated path and predicted path
综上所述可知,拼接生成的载荷数据可以正确地反映车辆工况,但精度需要进一步提升。
4 结论
1)本文提出的方法在操作上具有可行性,该方法既能有效关联车辆实际任务,又能在短时间内快速生成大量车辆载荷数据样本。
2)该方法的关键是通过轨迹规划和动作规划方法,有效地预测车辆行驶路径与驾驶员操纵动作,从而找到对应的载荷谱块并进行快速拼接,形成与实际工况相符的有效载荷谱,为耐久性台架试验、可靠性台架试验、装备寿命估计提供与实际情况近似一致的有效载荷输入。
