下肢康复机器人的结构设计与动力学分析
2022-05-19尚会超付晓莉李志强
尚会超,冀 涛,付晓莉,李志强
(中原工学院机电学院,河南 郑州 451191)
1 前言
近年来,我国老龄化带来的脑中风偏瘫患者的数量与日俱增;同时,因交通事故,高强度作业环境等外因造成的上下肢肢体损伤,脊髓损伤患者的数量也一直居高不下。针对于这些患者,国内仍然是以治疗为主,缺少后期相对应的康复训练。因此,为了帮助患者回归社会,重新获得较高的生活自理能力,治疗后的康复训练必不可少,同时相对应的康复设备的研发也十分有必要。
关节主上下肢外骨骼康复训练器属于关节功能康复训练器,以持续被动运动(CONTINUES PASSIVE MOTION),简称CPM理论为基础,通过模拟人体自然运动,激发人体的自然复原力,发挥组织代偿作用。现有的下肢外骨骼康复训练器还存在效率低,与穿戴者的协调性低等问题[1]。为此许多专家学者都外骨骼做了详尽的研究。文献[2]对下肢外骨骼双膝蹲—起立的特征动作进行了运动研究。文献[3]将下肢外骨骼划分为单脚支撑模式和双脚支撑模式进行了动力学研究。文献[4]基于人体生物力学和关节映射关系对下肢康复训练机器人进行运动建模和研究。文献[5]基于老年人常速行走过程中下肢关节变化,进行运动研究,并提出一种带减重的外骨骼机构。以上研究主要集中在外骨骼机器人的结构设计,运动和动力分析等方面。由于外骨骼设备是直接应用于人体,所以人机运动的协调是非常重要。参考康复评定学中对人体正常步态的规划和描述,进行外骨骼训练器的结构设计,并且对外骨骼训练器进行运动学和动力学分析和验证。
2 运动规划
康复评定学界定一般成年人的步行周期为(1~1.32)s。每一个步行周期分为支撑相和摆动相。其中支撑相包括单支撑相和双支撑相。单支撑相一般占一个步态周期的40%。双支撑相一般占一个步态周期的20%。摆动相占步态周期的40%。美国加利福尼亚州的RLA国家康复中心提出的RLA分期法(RLA八分法),结合了正常步行周期和各时相发生过程进行分期。
如图1所示,RLA八分法将正常人体步态分为支撑初期,支撑中期,支撑末期,摆动前期,摆动初期,摆动中期,摆动末期[6]。以此来描述正常人体步态中关节的运动形式,如表1、表2所示。

图1 RLA八分法Fig.1 RLA Method of Eight

表1 支撑相下肢各关节运动Tab.1 The Lower Extremity Joints of the Support Phase Move

表2 摆动相下肢各关节运动Tab.2 The Lower Extremity Joints Move
3 结构设计
由于下肢关节康复训练器是帮助患者进行康复训练使用,并且直接应用于人体上的设备,所以必须要在保证功能的条件下符合人机工程学和仿生学的设计理念。应该尽量符合实际人体曲线。必须保证安全性,要求轻便,结构坚固,耐用,尽量减少机构复杂度[8]。实验样机,如图2所示。
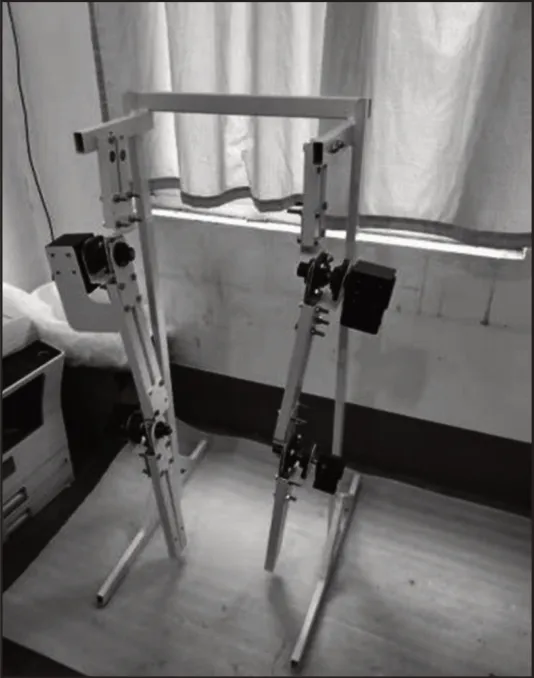
图2 实验样机Fig.2 Experimental Prototype
下肢关节康复训练器设计方案为髋—膝两关节结构形式,由于矢状面的运动是人体下肢部分的主要运动,所以设计考虑髋关节和膝关节在矢状面内的运动[9]。下肢关节康复训练器的设计包括髋关节结构,膝关节机构,大腿支撑,小腿支撑,靠背以及支架设计。设计过程中结合人机工程学理论,根据国标GB10000—88《中国成年人人体尺寸》,选取男性(18~60)岁年龄段95百分位数并且经过功能修正量处理[10]。大腿长为505mm,小腿长为403mm。同时考虑到装配误差和关节处结构尺寸影响,所以大腿部件为480mm,小腿部件长为380mm。
在髋关节和膝关节处各有一套电机驱动系统,输出轴处采用轴键配合的形式,以此带动大腿支臂和小腿支臂进行摆动根据人体曲线设计大腿支臂和小腿支臂,大腿支臂需要微量的外弯弧度,小腿支臂需要微量的内弯弧度。关节传动部位轴的两侧有轮毂式轴承,用以抵消轴向力,并且提供微量的调心功能。三维模型图,如图3所示。下肢外骨骼康复训练器机构图,如图4所示。

图3 三维模型图Fig.3 3D Model
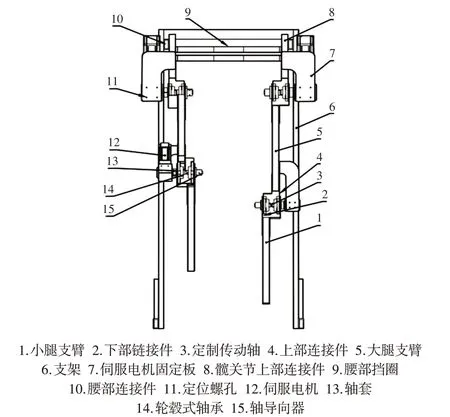
图4 下肢外骨骼康复训练器机构图Fig.4 Structure Diagram of Exoskeleton Rehabilitation Trainer
4 运动学与动力学分析
4.1 运动学分析
将大腿支架,小腿支架和脚部的虚拟模型简化为平面三连杆机构。由于人体下肢两腿的运动相互协调,所以从单条腿进行分析。将简化后的平面三连杆模型,以髋关节为原点O(0,0),建立笛卡尔坐标系。式中:L(ii=1,2)—大腿段和小腿段的长度;D(ii=1,2)—大腿段和小腿段的质点;A—大腿段的末端端点;B—小腿段的末端端点。运动坐标图,如图5所示。

图5 运动坐标图Fig.5 Motion Diagram
A点的位置:

B点的位置:

将A,B各点的位置对时间t进行微分,得出各点的速度:

进行逆向求解:
根据以上运动学公式求解,用Matlab进行模拟分析,得出以膝关节处为例的角度曲线和CGA(临床步态分析标准数据)[11-13]基本特征吻合。其存在误差的原因是因为,腿部之间长度存在差别。CGA角度数据比较,如图6所示。

图6 CGA角度数据比较Fig.6 Angular Data Comparison
4.2 动力学分析
由图4坐标系可知系统动能Ek和系统势能Ep。

首先构建拉格朗日方程表达式,式中:E—方程函数E=Ek-Ep;τ—矢量力矩;D—系统耗散函数;θi和—系统的广义坐标和广义速度(i=1,2,…,n);τ—其在广义坐标上的力。

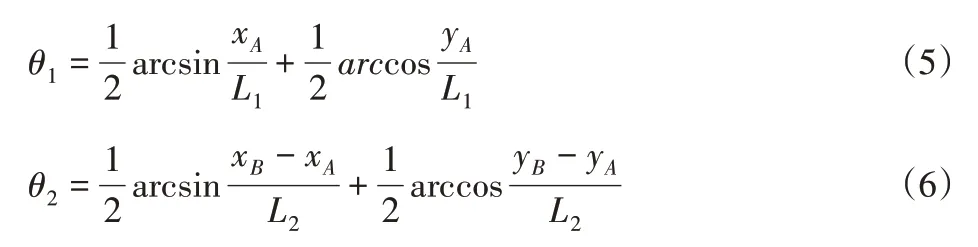
以第一段关节为例(i=1),将式(5)和式(6)代入式(7)中:
把上述式(11)总结之后得出的动力学表达式为:

5 模拟仿真
为了和理论计算结果进行验证,检测各个时刻的参数变化,并且为后期结构优化和控制电机输出力矩,需要进行仿真模拟。将三维模型简化导入到ADAMS中,在髋关节理论原点处设置固定。在各关节处设置转动约束。各个连杆的质量参数根据实际样机材料进行设置。人体大腿部位的质量约为(8.16±0.82)kg,相对质量约为(14.11±2.56)%。小腿部位的质量约为(2.33±0.31),相对质量约为(4.00±0.85)%[13]。在SolidWork中定义模型材料属性,将其支架部分定义为普通碳钢,密度为7.64g/cm3;大腿支架和小腿支架部分定义为1060合金,密度为2.9g/cm3;关节部分传动件定义为合金钢,密度为7.82g/cm3。模拟计算出真实情况下支架,大腿支臂和小腿支臂等部位的质量。支架为37.788kg,大腿支臂为3.212kg,小腿支臂为2.671kg。将以上数据输入ADAMS中,定义材料的属性。
依据以上康复评定学中RAL 八分法所提供的人体步态参数,编写ADAMS的连续阶跃函数,以单个髋关节为例函数如下。

设置约束进行仿真分析,从而得出各个关节的角速度,动量,扭矩等参数,编号NO2450表示右侧小腿膝关节,编号NO3470表示右侧大腿髋关节,编号NO24502 表示左侧小腿膝关节,编号NO34702表示左侧大腿髋关节。各关节扭矩图、角动量、角速度、功耗示意图,如图7~图10所示。
图7 各关节扭矩图Fig.7 Torque Diagram of Each Joint
图8 各关节角动量Fig.8 Angular Momentum of Each Joint

图9 各关节角速度Fig.9 Angular Velocity of Each Joint
图10 各关节功耗Fig.10 Joint Power Consumption
6 结论分析
为了验证模拟仿真的结果,选取分期过渡时的8个点参数,分别是支撑前期,支撑初期,支撑中期,支撑末期,摆动前期,摆动初期,摆动中期和摆动末期8 个步态运动状态下的参数带入式(5)和式(6),分别计算该状态下的动能Ek和势能Ep,在ADAMS后处理过程中,选择Table按键,将曲线数据转换为表格数据。分别表示为动能δEk和势能δEp,将两组数据进行比较,统一换算单位为N·M。并且计算误差的绝对值ϑ,如表3所示。由表3可知,最大误差为1.227,不超过最大理论值得百分之10,所以基本理论计算数值和模拟数值基本相符。误差存在的原因,主要是因为理论计算是将模型简化成连杆形式,而在软件仿真中的模型机构虽然也经过简化,但仍旧相对较为复杂。误差在合理范围内,所以得出的结论较为准确。通过以上得出的运动数据,速度的变化曲线,可以为后续做速度控制模式的驱动程序提供参考依据。能量变化的数据,可以为外骨骼机器人在能量控制方面提供参考。力矩的关系可以为伺服电机,控制器等驱动部件的选型提供参考。
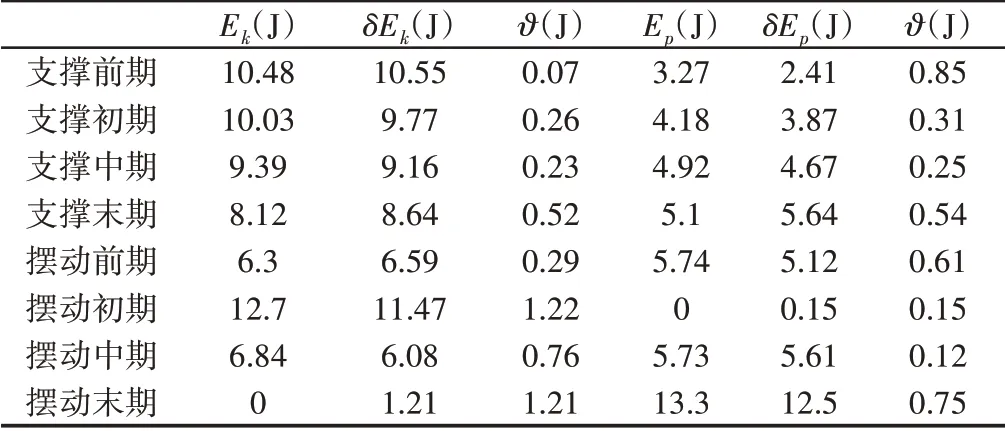
表3 数值计算分析Tab.3 Numerical Analysis
7 总结
这里对下肢被动式康复训练器进行研究,参考康复医学的RAL八分法,对人体正常步态进行规划。在充分考虑人体使用的适应性基础上,对其结构和传动机构进行了设计和数学建模分析。通过理论计算得出运动学和动力学参数,通过matlab进行数值计算并且与CGA步态标准相比较,验证模型的正确性。通过ADAMS 模拟仿真,得出相关的运动和动力参数,并且选取RLA八分法中8个时期的数据点和理论计算的数值相比较,分析误差验证结果。以此来为电机选型和控制程序的编写等提供数据参考。相比主动式的康复训练器,被动式康复训练器更加智能化,并且符合人体正常运动状态。