未知环境下机器人受限机械手PLC阻抗控制系统
2022-05-19周凤星
刘 静,周凤星
(1.武昌工学院,湖北 武汉 420065;2.武汉科技大学,湖北 武汉 430081)
1 引言
作为一种能够替代人工的多功能机械手,它可实现不同位置的多方位自动行为,具有较强的灵活性,在大多数环境下能完成对目标的搬运工作,是工业流水线上必不可少的机械。不但可以节省劳动力,起到保护工人生命安全的巨大作用;同时它的成本与人工相比较低,一定程度上减少企业投入。
文献[1]提出一种基于模糊补偿的径向基函数(Radial Basis Function,RBF)神经网络机械手控制方法。采用比例积分(Pro⁃portional-integral,PD)控制器得到机械手控制方案,利用模糊逻辑补偿器分析系统干扰并对建模误差进行补偿;机械手的控制精度得到有效提高。文献[2]研究出一种基于观测器的积分滑模控制方案,引入滑模面完成系统故障信号的重构,在确保系统状态趋向滑模面的同时,分析系统稳定性。
上述两种方法抓取信号的跟踪性能较差,导致控制稳定性不高。这里设计一种机械手可编程逻辑控制器[3](Programmable Logic Controller,PLC)阻抗控制系统。利用西门子公司的PLC S7-200对机械手进行阻抗控制,通过选择旋转编码器、光电传感器等硬件设备,设置阻抗控制策略,确定PLC软件控制流程,完成系统设计。
2 机械手阻抗模型构建
2.1 机械手组成
机械手动作完成一般需要驱动、执行、控制等机构的协同配合[4]。其中驱动系统的主要工作是为机械手提供动力源;执行系统能够协助完成上下料、抓取等操作;控制系统则属于机械手的大脑,不但能确保机械手根据设置动作完成任务,还能对其动作进行修正。各系统之间的关系,如图1所示。

图1 机械手组成结构示意图Fig.1 Schematic Diagram of the Structure of the Manipulator
2.2 阻抗模型
阻抗模型[5]种类较多,这里建立的阻抗模型如下:

式中:Md、Dd、Kd—机械手理想的惯性、黏性阻尼以及刚度矩阵;
Fd—理想接触力;Fe—真实接触力。因此有Fe=[fn,ft]T,其中fn与ft—法向力与切向摩擦力。

式中:Ke—环境刚度矩阵;δxn—变形矢量。

式中:μ—干摩擦系数。

对机械手阻抗进行建模,有助于分析机械手运动特性,提高系统对阻抗控制的精度。
3 机械手PLC阻抗控制系统设计
3.1 PLC系统构成
这里是在西门子S7-200PLC 基础上进行阻抗控制系统设计。编程控制器类型较多,其结构主要包括电源、储存器[6]、中央处理器以及输入输出接口等。其工作原理基本上是对输入/输出物理量利用一定算法来实现[7]。以S7-200为例,PLC结构,如图2所示。

图2 PLC结构图Fig.2 PLC Structure Diagram
这里选用的门子S7-200PLC是一款性价比较高的小型可编程控制器,具有强大的功能,可达到一般大中型控制器水准[8]。不但系统集成方便,还能重新组建网络,具有人机对话的功能。
3.2 系统控制配置
3.2.1 旋转编码器
编码器可对角位移进行测量,因此也称为角编码器[9]。由于机械手阻抗控制系统需要对机身转动进行检测,同时还要达到准确控制目的。此外,还考虑到S7-200系列的控制器可以进行高速计数,因此选择欧姆龙E6A2-CW5C增量式旋转编码器,其具体参数,如表1所示。

表1 编码器型号参数Tab.1 Encoder Model Parameters
3.2.2 光电传感器
光电传感器是将光电元件当作检测元件的传感器,先将被测量变换为光信号,再通过光电元件将光信号转换为电信号。通常发送器、接收器与检测电路构成,其主要特点是精度高、反应迅速、非直接接触、结构简单。本系统选用的是SICK WT14-2P422型号的光电传感器,其主要参数,如表2所示。

表2 光电传感器主要参数Tab.2 Main Parameters of Photoelectric Sensor
光电传感器在与PLC相连时,这里的PLC输入端为源型,则需要将公共端与0V相连,这样电流可通过24V进入传感器,再进入PLC的接线端子,利用内部电路与公共端进行连接。
3.2.3 机械手轴
机械手的XY轴利用85STH65-5904A两相混合式步进电机。其步矩角度为1.9°,能够带动机械手进行各种方向移动。步进电机驱动器则使用脉宽调制控制原理,加强了全数字式电流环控制,确保电机不会出现共振区域,减少噪声与温度。
3.3 系统控制策略与流程
3.3.1 物体空间坐标系构建
物体空间坐标系的构建和指尖具体位置有关,因为机械手每个手指和被抓取目标之间不存在相对移动,所以坐标系中心x′0和目标质心不发生重叠,可将x′0视为目标上的某点。同时利用它对之间中心位置进行描述:

式中:x′i—第i个指尖的笛卡尔位置[10],结合目标抓取力不同手指平均分配规则,目标坐标系由不同指尖位置线性组成。则坐标系定向矩阵如下:

公式中,ro1描述为:

目标坐标系中第三轴ro3垂直与矢量v1、v2的线性平面表示为:


式中:ro2—目标坐标系中第二轴,其表达式如下:

3.3.2 阻抗控制方案确立
为使控制系统更具稳定性,将平移弹簧保存的能量确定为:

其中:

该公式描述物体坐标系的位移差,Kt′=ktI属于平移刚度矩阵。因此平移弹簧形成的驱动力矩能够利用其能量倒数计算获得:

式中:KtΔx′od=ft—与物体坐标系对应的平移驱动力矩,使此力矩映射在关节力矩中,获得平移弹簧的电机力矩:

式中:J—旋转刚度对角矩阵。
同理能够计算得出空间旋转弹簧与连接弹簧的电机力矩τ0与τc。
因此计算得出空间弹簧关节动力矩公式为:

则机械手PLC阻抗控制规律表示为:

式中:N′(θ)—无源力补偿;τext—关节力矩反馈;v′o—弹簧中心相对目标空间坐标系的速度:

利用上述控制规律,即可实现对机械手阻抗的有效控制。针对控制策略,设计的系统软件流程,如图3所示。
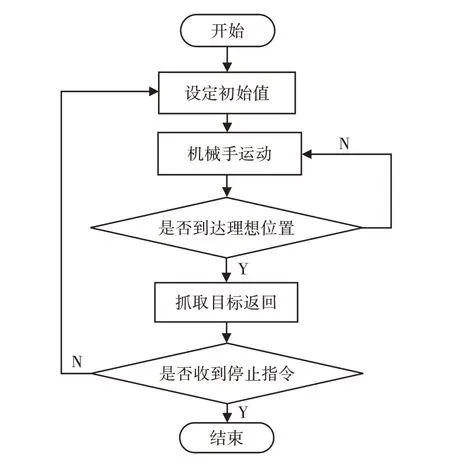
图3 系统软件控制流程图Fig.3 System Software Control Flow Chart
4 仿真实验数据分析与研究
TVT-MERSA 自动生产拆装调试装置属于一个非常优秀的仿真实验平台,不但具备传输、机械手、供料等单元,且不同模块之间通过控制器进行单独控制,更加方便网络连接。此外,还具有电源、按钮等多种设备。受限机械手实物图,如图4所示。
实验中选取的机械手相关参数,如表3所示。这里选用的西门子S7-200CPU22系列的PLC 具备下述几种结构的配置单元:S7-200CPU221单元:共10点,其中6点为输入,4点为输出,没有扩展功能;S7-200CPU222单元:共14点:其中8点为输入,6点为输出,可实现一定模拟量的控制以及两个模块的扩展功能;S7-200CPU223单元:共40点,其中24点为输入,16点为输出,通信口数量非常多,通信能力较强。在不加辨识情况下,设置一个变化的力信号,利用文献[1-2]以及这里方法对其进行跟踪。获得的实验结果,如图5所示。

表3 机械手参数表Tab.3 Manipulator Parameter Table
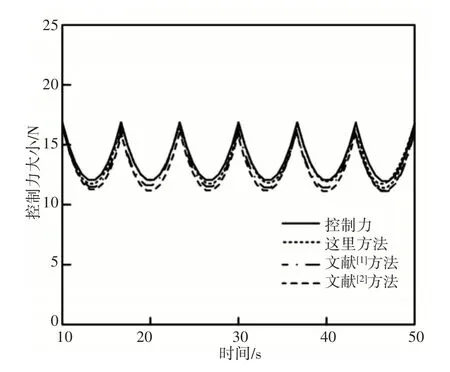
图5 不同方法抓取力的跟踪情况图Fig.5 Tracking Situation of Grasping Force by Different Methods
加入辨识的目标阻抗,使机械手受到一定约束,在实验条件不变情况下,再次对三种方法进行抓取力信号的跟踪,跟踪曲线,如图6所示。
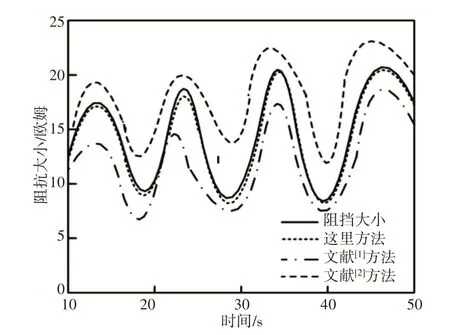
图6 阻抗跟踪控制曲线图Fig.6 Impedance Tracking Control Curve
由图5可知,机械手在受到约束限制时,这里控制系统能够精准地对阻抗大小进行控制,而其它两种方法控制误差较大。这是因为这里在PLC控制下可以推理出抓取物体的期望力,确保阻抗跟踪精度,从而更好地实现阻抗控制。虽然在控制时出现小幅度抖动,但是不会对实际跟踪位置造成影响。
5 结论
这里在西门子PLC控制基础上,设计一种阻抗控制系统,大大提高机械手在未知环境下的操作性能。但是这里方法也存在一些不足,例如,只对PLC的控制与编程进行详细分析,并没有对开关和检测器做出选择,希望在今后研究中可以弥补这些不足。