多功能体能运动训练器PMAC多轴控制方法
2022-05-19郎殿栋
郎殿栋
(北京体育大学,北京100084)
1 引言
目前我国各项运动的快速发展,运动健康领域普遍采用多功能体能训练,通过体育运动有效促进人类身体健康[1]。利用功能性体能训练能够有效改善传统训练存在的不足,全面深化人体、运动以及体育三者之间的关系,在提升训练效果的同时,还能够有效避免运动期间发生损伤的情况。另外,注重核心力量的训练才能够实现各种复杂的动作,进而组成完整的动力链。如何有效实现训练器的多轴控制,成为社会各界学者广泛关注的热点话题。
部分专家学者给出了一些较好的研究成果,文献[2]提出一种多轴协同转向控制方法,通过组建Lyapunov函数,采用Lyapunov函数构建仿真模型,对阶跃路线以及正弦进行跟踪控制,该方法能够控制汽车列车跟踪多种目标路线行驶。文献[3]提出了一种相邻交叉耦合控制方法,主要结合多轴同步控制的基本原理组建对应的控制模型。该控制方法的收敛速度较快。以上方法虽然现阶段取得了较为满意的研究成果,但是由于未考虑预补偿多轴轮廓误差,导致多轴控制延误以及误差增加,容错率降低的问题。
为此,提出多功能体能运动训练器PMAC多轴控制方法。采用辨识传递函数预测实际位置,预补偿多轴轮廓误差,建立多功能体能运动训练器的拉格朗日动力学模型,调整PMAC多轴控制器控制参数。采用自适应学习算法,计算隶属度函数参数,实现多功能体能运动训练器PMAC多轴控制。所提方法不仅能够提升容错率,同时还能够有效降低控制延误以及误差,获取较为满意的控制结果。
2 多功能体能运动训练器PMAC多轴控制方法
2.1 PMAC多轴轮廓误差预补偿
主控PMAC将控制指令通过PID计算转换为速度量控制信号传递至电机驱动器,其中,速度环的控制在多功能体能运动训练器驱动内部完成。以下主要通过交流伺服电机驱动结构完成电机的全部运行。设定Tm代表输出力矩,Td代表负载力矩,其中电机的驱动状态方程为:
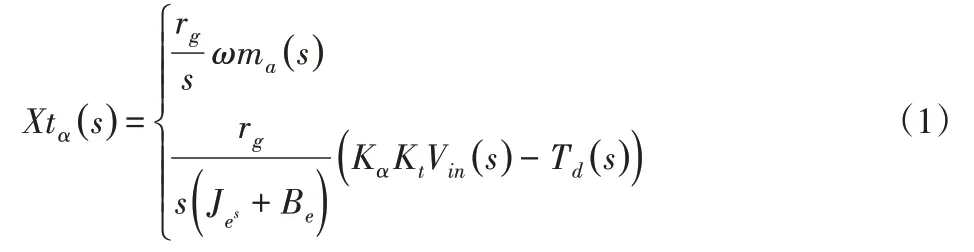
式中:ωma(s)—电机实际转动的角速度;Kα—电流放大器;Kt—电动机常数;rg—转换系数;Je—转动惯量系数[4];Be—粘滞阻尼系数。
将其转换为时域方程,则有:

在不考虑负载的情况下,能够获取整个系统的传递函数[5],即:

在多轴运动系统中,需要针对单轴驱动建模进行分析。通过分析结果可知,不同的轴分别跟随不同的误差,当轴的误差出现在轮廓线上即为轮廓误差。根据轮廓误差补偿模型进行补偿的先决条件就是对系统进行建模,由于轮廓误差的测量精度会对补偿结果产生影响,所以需要在设定周期内完成测量以及补偿等全部操作。
根据轮廓误差模型对轮廓误差进行求解,得到的求解结果即为实际位置点到命令曲线的最短距离[6]。针对两轴轮廓误差模型而言,可以结合实际曲线进行计算,即:

在实际应用过程中,由于系统进行插补的速率较快,指定位置的曲率半径以及跟随误差两者之间的差值较小,但是由于曲率半径计算过程较为繁琐,导致补偿过程时间复杂度也会相应增加,会对轮廓误差补偿产生负面影响[7]。所以,为了有效避免上述问题的发生,直接采用直线拟合方式对轮廓误差进行估计。
多轴运动控制系统属于离散的伺服控制,通过插补器将曲线进行离散处理,形成命令轨迹线对应的插补点,在设定的周期内对多功能体能运动训练器进行控制,使实际轨迹和命令线两者之间的距离更近。其中,命令轨迹主要由对应的插补点的短线段建立。以下详细给出轮廓误差的求解流程:
(1)设定一个长度为N的队列,r(k)=r(k-N)—缓存需要的命令位置点,其中r(k)—k时间段的命令位置,确保r(k)和实际位置点p两者的时间相同,队列中的数据会随着插补过程不断进行更新。计算时间复杂度主要是由队列长度决定的,其中队列长度越长,计算效率越慢;反之,队列长度越短,则计算效率就越高。
(2)获取队列中不同位置点r(k)=r(k-N)到实际位置点的距离,同时寻找最近点r(k-m)。为了使最近点在缓存队列中,N值应该足够大,假设m=N,则说明队列的长度N取值较小,此时需要适当增加N的取值,以有效提升轮廓误差计算结果的准确性[8]。
(3)连接最近点r(k-m)、相邻点r(k-m-1 )以及r(k-m+1)组成的两条线段,分别获取各条线段的坐标位置。
(4)求解获取P1、P2到实际距离点P的较近点P*,即轮廓点误差,其中P*和P两者之间的距离即所需要获取的轮廓误差值。
已知坐标为Pi(xi,yi,zi)、Rk(xk,yk,zk)以及通过向量求法,能够获取以下的计算式:
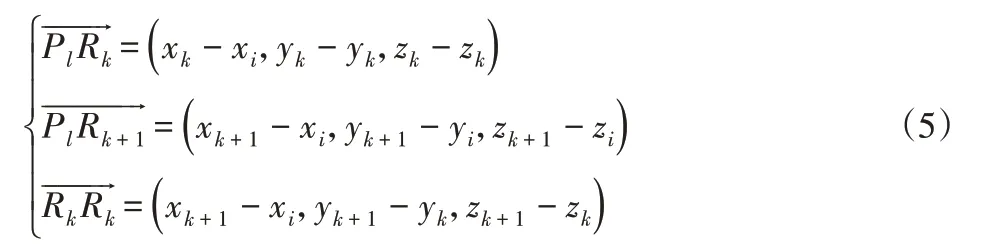
通过上述求解过程能够准确计算不同曲线条件下的轮廓误差,并且能够更好地应用到轮廓误差的补偿模型中[9]。
预补偿技术主要是利用对插补点位置的修改完成轮廓误差的补偿,而交叉耦合的补偿方式主要是利用对伺服过程进行修改实现的,具体的计算式如下:

式中:Pref—期望轨迹上的插补位置;
Pact—实际位置;
Pn—轮廓误差点。
通过需要运行的插补轨迹得到命令位置,然后在运行的平台中,利用插补轨迹,获取真实的运行轨迹位置。得到系统的轮廓误差之后,假设直接将误差补偿量应用到系统的命令轨迹上,会导致系统出现命令轨迹不光滑的现象,轨迹运行时间增加,带来一系列的负面影响。为了有效解决上述问题,主要通过低通滤波获取对应的补偿量,有效降低系统产生的振荡,有效确保补偿结果的准确性。
2.2 多功能体能运动训练器PMAC多轴控制
通过PMAC多轴轮廓误差预补偿后,利用拉格朗日等式建立动力学模型,采用自适应模糊神经推理系统进行自适应学习,同时调整模糊控制系数的参数,形成自整定控制器,完成多功能体能运动训练器PMAC多轴控制,以下给出具体的操作步骤:
模糊逻辑控制器主要由多个不同的部分组成,将杆位置的参考值设定为输入,将实际的杆位置作为输出,模糊模块的输入为杆长误差E以及杆长误差在时间上的导数EC。其中隶属度函数主要用来描述不同输入参与计算的程度,将该函数作为每种输入关联的一个权重值,主要用来定义不同输入值间的功能重叠,最终确定一个输出值[10]。
推理以及决策过程中主要包括以下步骤:
(1)根据对比全部规则以及控制器输入确定目前所使用模式的规则。
(2)通过规则制定相应的决策。
通过AND运算符计算输出隶属度,具体的计算式如下:

式中:μ(z)—模糊化处理过程。
去模糊化就是在模糊集中提取确定值设定为代表值。利用联合推理过程计算三角形面积的模糊中心。设定λ(E:EC)权重系数主要依赖于E和EC,将Kp和Kd两者用于计算,则具体的计算式为:

控制器的参数自整定计算式为:

以下主要通过自适应模糊推理系统进行参数增益整定,具体的操作步骤为:
(1)对前件参数进行固定,同时使用最小均方差分法对结论参数进行训练。
(2)采用反向传播BP近似误差对前件参数进行更新。
将最小误差分析法嵌入到多功能体能运动训练器PMAC多轴控制系统中,以有效增强系统控制结果的可靠性。在整个过程中,需要进行线性训练,将获取的Kp和Kd作为不同训练器的伺服阈值。
其中,AN-FIS主要是由以下几部分组成,即:
(1)第一层:
该层中各个节点i通过以下函数实现自适应功能,即:

(2)第二层:
共计含有规则25个,各个节点输出分别代表不同规则的激活等级,即:

(3)第三层:
通过固定节点i计算第i个规则激活等级所占据全部激活等级的比例,具体的计算式为:

(4)第四层:
根据自适应节点i计算第i个规则对总体输出的贡献,即:

(5)第五层:
单一节点通过全部输入信号计算总体输出,具体的表达式为:

通过上述操作步骤能够确定输入数据和输出数据,实现多功能体能运动训练器PMAC多轴控制。
3 实验结果分析
为了验证所提多功能体能运动训练器PMAC多轴控制方法的有效性,在Intel-i33.40GHz CPU,实验语言为Python环境下进行测试。多功能体能运动训练器,如图1所示。

图1 多功能体能运动训练器Fig.1 Multifunctional Physical Exercise Trainer
分别采用文献[2]方法、文献[3]方法和所提方法,进行实验并获取对比实验数据。经过不同迭代次数后,得到三种不同控制方法的多轴控制延误对比结果,如图2所示。
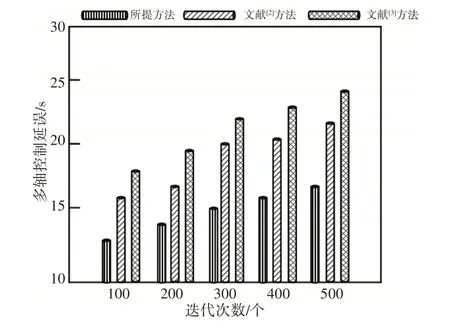
图2 不同控制方法的多轴控制延误对比结果Fig.2 Comparison of Multi-Axis Control Delays with Different Control Methods
分析图2中的实验数据可知,随着迭代次数的增加,不同方法的多轴控制延误随之增大。当迭代次数为500次时,文献[2]方法的多轴控制延误为22s,文献[3]方法的多轴控制延误为24s,而所提方法的多轴控制延误为17s。由此可知,所提方法的多轴控制延误较低。由于所提方法优先对PMAC多轴轮廓误差进行预补偿,能够在伺服期间进行位置预测以及求解,获取系统的数学模型,确保整个控制过程的顺利完成。为此,所提方法的多轴控制延误明显更低一些。
为了验证所提方法的控制效果,以下实验测试对比不同方法的控制误差,具体实验结果,如表1所示。
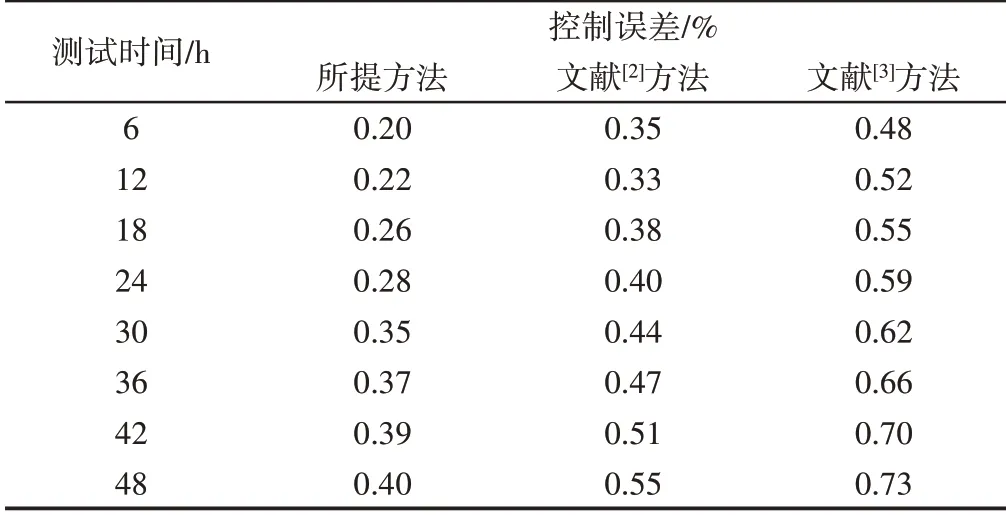
表1 不同方法的控制误差对比结果Tab.1 Comparison of Control Errors of Different Methods
分析表1中的实验数据可知,随着测试时间的增加,不同方法的控制误差随之增大。当测试时间为48h,文献[2]方法的控制误差为0.55%,文献[3]方法的控制误差为0.73%,而所提方法的控制误差为0.40%。由此可知,所提方法的控制误差较小。
为了进一步验证所提方法的有效性,以下实验测试对比各个方法的容错率,具体的实验对比结果,如图3所示。

图3 不同方法的容错率对比结果Fig.3 Comparison of Fault Tolerance Rates of Different Methods
分析图3中的实验数据可知,所提方法的容错率受到迭代次数的影响较小,但是另外两种方法的容错率会随着迭代次数的增加而降低,由此验证了所提方法的优越性。主要因为所提方法对PMAC多轴轮廓误差进行预补偿,促使所提的容错率得到一定程度的提升。
4 结束语
为了获取理想的控制结果,提出一种多功能体能运动训练器PMAC 多轴控制方法。通过多轴轮廓误差模型,预补偿轮廓误差。采用自适应学习算法,计算隶属度函数参数,实现多功能体能运动训练器PMAC多轴控制。实验结果如下:(1)所提方法的多轴控制延误仅为17s,与其他两种方法相比,多轴控制延误较低。(2)所提方法能够有效减小控制误差,提高容错率。