卫星平面可展天线背架结构设计与分析
2022-05-19宋振东何元一王童语
李 刚,宋振东,何元一,王童语
(1.沈阳新松机器人自动化股份有限公司,辽宁 沈阳 110000;2.深圳职业技术学院机电工程学院,广东 深圳 518055;3.黑龙江科技大学机电工程学院,黑龙江 哈尔滨 150002)
1 引言
平面可展结构是一种为了解决由多功能、大尺寸的需求与运载工具有效运载容积限制的矛盾,而发展起来的一种复杂航空机构。在空间探测、卫星通讯、军事侦察等方面应用广泛,主要用于平面天线、卫星太阳帆(电池阵)、太空折叠伸展臂、空间平台等[1-9]。平面可展天线背架结构采用可展桁架结构,由完全一致的桁架单元组成。具有高刚度、高精度、高重复性、高收纳率等诸多特点,可以满足各种复杂的几何设计。通过分析平面可展天线背架结构,可以较为全面的了解平面可展结构的性能特点。
由于使用桁架单元,使可展机构具有较强的模块化功能,可以根据需要增加模块或者减少模块,极大的扩大了可展桁架机构的功能和重复使用率。桁架单元主要有四面体单元、四棱锥单元、六面体单元、三棱柱单元以及六棱柱单元等[10-11]。
星载平面反射面可展天线一般采用空间可展支撑桁架机构作为天线的背架,桁架结构具有高刚度、高收纳率、高稳定性等特点,其设计相对简单,可以满足许多复杂的机构需要。1978年美国发射的Seasat SAR 卫星上搭载了2架桁架式平面反射面可展天线。每个天线由8 块相控阵平面天线组成,支撑机构采用六棱锥可展桁架机构,天线完全展开后尺寸为(10.74×2.16)m,完全折叠后尺寸为(1.34×2.16)m,整机重量为103kg[12]。1991年欧空局成功发射了ERS-1 遥感卫星,该卫星共有5块平面可展天线面板,展开尺寸为(10×1)m,折叠后尺寸为(2.05×1.1×0.65)m,整机质量85kg[9]。1996年加拿大航空局发射了Radar⁃sat-1 相控阵天线,该天线位于卫星的两侧,展开后类似两翼形状,展开面积为(15×1.5)m,单侧重量223kg[13]。2007年,加拿大航空局再次发射了Radarsat-2卫星,该卫星上搭载了由4块平面天线面板组成的平面可展天线。四块面板展开总厂15m,机构重量56kg[14]。
尽管平面可展天线背架结构发展了几十年,但其机构复杂,重量大,刚度差等因素仍然存在,严重制约着平面可展机构的发展。为了解决目前存在的问题,这里提出了一种卫星平面可展天线背架的结构方案。从机构学的角度出发,建立了机构简化模型,推导了机构模块化拓展后自由度与模块数之间的关系。为了研究机构的动态折展过程,这里建立了机构的数学模型,对机构折展过程进行了轨迹仿真。为了研究机构的结构动力学特性,这里建立了平面可展天线背架的有限元模型,并完成了机构的模态分析、谐响应分析及热变形分析。
2 卫星平面可展天线背架结构设计
根据卫星天线功能需求,这里提出了一种卫星平面可展天线背架的结构方案,如图1所示。
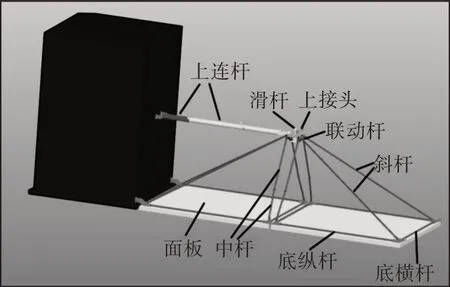
图1 卫星平面天线背架结构Fig.1 Structure of Satellite Planar Antenna
机构驱动采用电机、弹簧、扭簧,电机分别置于面板与卫星连接处以及两板之间的铰链处,弹簧布置在滑杆与上接头处,扭簧布置在其他铰链处,作为辅助展开动力。根据需要,可在该机构上进行模块化扩展。模块与模块之间采用剪式机构进行连接,确保模块同步展开。每个剪式机构由4根短杆和2根长杆组成具有单一自由度的平面双闭环机构,如图2所示。为了分析机构的折展运动特性,这里将机构部件进行简化,如图3所示。

图2 剪式机构示意图Fig.2 Diagram of Scissor Mechanism
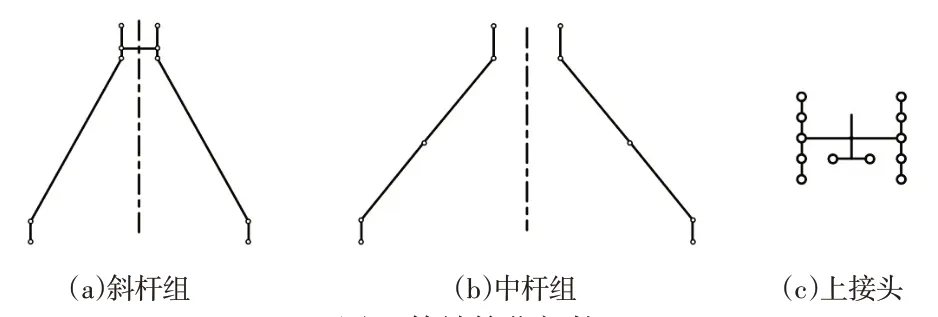
图3 等效简化部件Fig.3 Equivalent Simplified Components
根据部件简化模型,可以的到平面可展天线背架的简化模型,如图4所示。
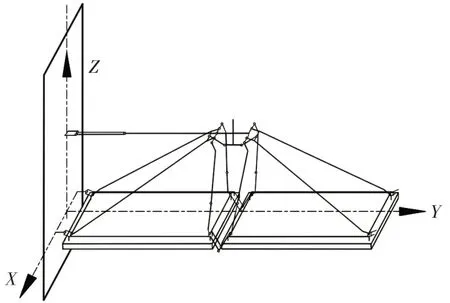
图4 机构简化模型Fig.4 Simplified Modall of Mechanism
图4所示的机构在展开过程中,空间各点均在竖直平面内运动,在计算机构自由度时,可将机构向YZ平面投影,如图5所示。并可采用平面机构自由度计算公式:

图5 机构投影图Fig.5 Projection of Mechanism

式中:n—机构总构件数;g—机构总运动副数;fi—第i个关节自由度。
图5所示的机构简图中,共有15个构件,铰链总数为20,第i个关节的自由度fi=1,因此机构的自由度为:

当两个模块串联并采用剪式机构进行连接时,机构结构简图,如图6所示。此时,机构简图中共有33个构件,铰链总数为47,第i个关节的自由度fi=1,因此,机构的自由度为:

图6 双模块机构投影图Fig.6 Projection of Mechanism with Two Modules

当机构模块数扩展为n时,构件总数为15+18×(n-1),总铰链数为:20+27×(n-1),所以机构的自由度为:

由以上分析可知,当可展天线背架的模块数发生改变时,机构整体自由度并不随模块数改变而发生变化,整机自由度为2。这说明在机构控制时,需布置两个驱动电机。
3 卫星平面可展天线背架建模与运动分析
为了了解平面可展天线背架上各点在展开过程中的运动情况,需要对机构进行数学建模,从而获取各点的位置坐标表达式。由于机构展开和折叠过程中,平面天线背架机构模块的两个四棱锥单元是对称运动的,因此,这里将含有一个模块的平面可展天线背架机构分为两部分:固连机构和可展模块,如图7所示。
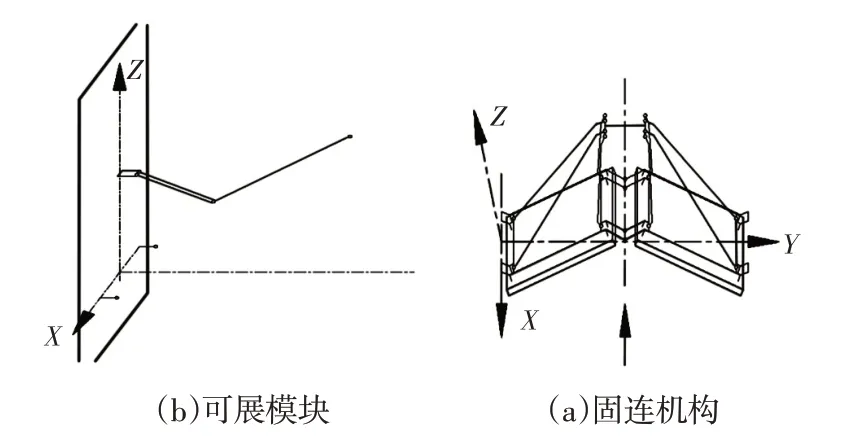
图7 机构简化示意图Fig.7 Simplified Diagram of Mechanism
根据以上简化模型,对含有一个可展模块的平面可展天线背架机构进行数学建模。将固连机构中的坐标系规定为整体坐标系,将可展模块上的坐标系规定为局部坐标系。将固连机构上点的坐标置于矩阵A中,可以得到一个(3×14)的整体坐标矩阵,将可展模块机构上节点坐标置于矩阵B中,可以得到一个(3×136)的局部坐标矩阵。由于固连结构与可展模块通过铰链连接,因此,天线背架展开过程中,相当于可展模块以铰链为中心进行旋转,假设旋转较为-α。利用坐标变换理论,可以得到旋转矩阵C:

为方便计算,将可展模中的局部坐标系原点移至铰链中心处,进行位置变换后的可展模块节点坐标矩阵B2为:

式中:P—铰链中心在局部坐标系中的位置向量;
Q—铰链中心在总体坐标系中的位置向量。
将B2进行旋转并置于总体坐标系下,即可得到可展模块在总体坐标系下的节点坐标矩阵B3:

最后将固连机构节点坐标矩阵及可展模块节点坐标矩阵组合,即可得到含有一个可展模块的平面可展天线背架机构的整体坐标矩阵D(3×150):

当模块的数量增加为2时,需要先将2个模块进行组合,即将第二个模块的坐标原点转换到第一个模块坐标系内的末端。设B1为将第二模块移至第一模块末端后得到的在第一模块局部坐标系下的两个模块节点坐标矩阵,则有:

式中:P2—第二模块局部坐标系下第二模块与第一模块连接点的位置向量;Q2—第一模块局部坐标系下的第一模块末端铰链中心的位置向量。
总体坐标系下可展模块节点坐标矩阵B3为:

式中:P1—铰链中心在局部坐标系中的位置向量;
Q1—铰链中心在总体坐标系中的位置向量。
最后可以得到含有两个可展模块的平面可展天线背架机构所有节点坐标矩阵D:

当机构中的可展模块数继续增加时,计算方法方法以此类推,这里不再赘述。由于机构自由度为2,因此在机构运行过程中,需要提供两个驱动,如图7所示,这里假设驱动置于α1及α4处。分别施加角速度ω1=(-0.05)rad/s,ω2=0.1rad/s。

图8 机构中各角度标注Fig.8 Angles in Mechanism

图9 关节角位移随时间变化曲线Fig.9 Curve of Joint Angular Displacement VS Time
在MATLAB 中进行机构展开过程的运动学仿真,可以得到各角度随时间变化曲线。
仍然以α1及α4为系统参数输入端,假设机构匀速运动,且ω4= 2ω1,在MATLAB 中进行平面可展天线背架机构展开运动学仿真,可以得到不同模块数的平面可展天线背架机构运动包络图。
从图10所示的仿真结果可知,这里设计的平面可展天线背架机构可连续平稳展开,满足可展天线功能要求。
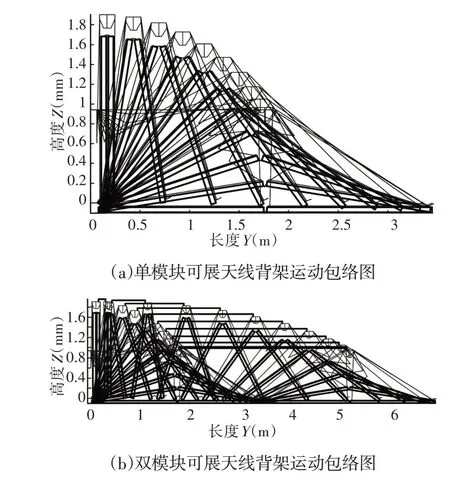
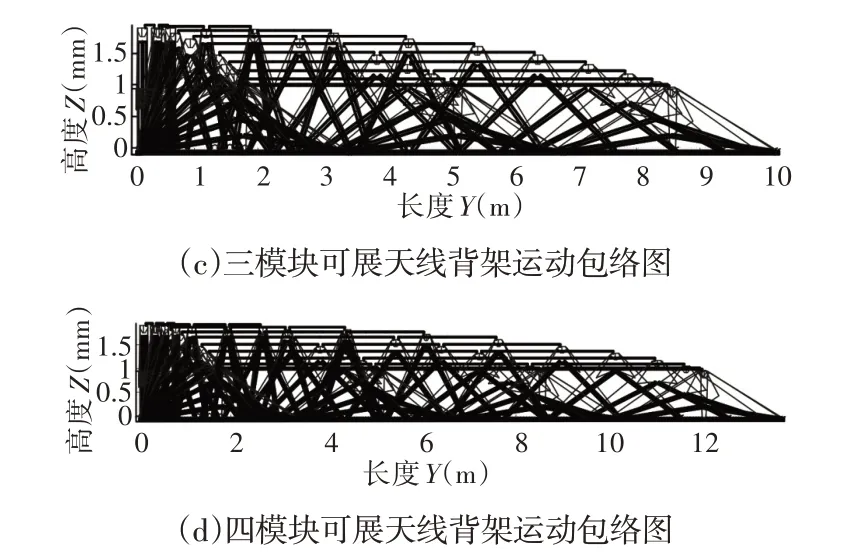
图10 不同模块数的平面可展天线背架机构运动包络图Fig.10 Motion Envelope Diagram of Planar Deployable Antenna Frame Mechanism with Different Modules
4 卫星平面可展天线背架结构动力学分析
机构的模态是机构本身固有的一种特性。通过对不同的机构进行机构模态分析,可清楚的了解所研究的机构可能会在哪些频率范围内或某个频率达到共振状态[15]。并且还可以提前得知在给定的频率影响下机械结构的可能响应。为了获得较准确的机构模态,首要需要在ANSYS中对机构进行准确的简化和建模,对机构的杆件、铰链等部件进行相应的处理。然后对机构进行适当的网格划分和合理的约束。其中,支撑杆选用Beam188 单元,截面为环形;天线面板采用Solid45单元;铰链采用Beam188单元,截面为矩形。各件材料属性,如表1所示。

表1 材料属性Tab.1 Material Properties
利用ANSYS前处理模块,对不同模块数的平面可展天线背架机构进行网格划分,如图11所示。

图11 模型的网格划分Fig.11 Meshing of Modal
在ANSYS中采用Block Lanzos法对单模块可展支撑桁架机构进行模态分析,得到前十阶模态,如表2所示。前4阶模态振动云图,如图12所示。

表2 单模块可展天线背架机构前十阶模态(Hz)Tab.2 First to Tenth-Order Modal of Single Module Deployable Antenna Frame Mechanism(Hz)
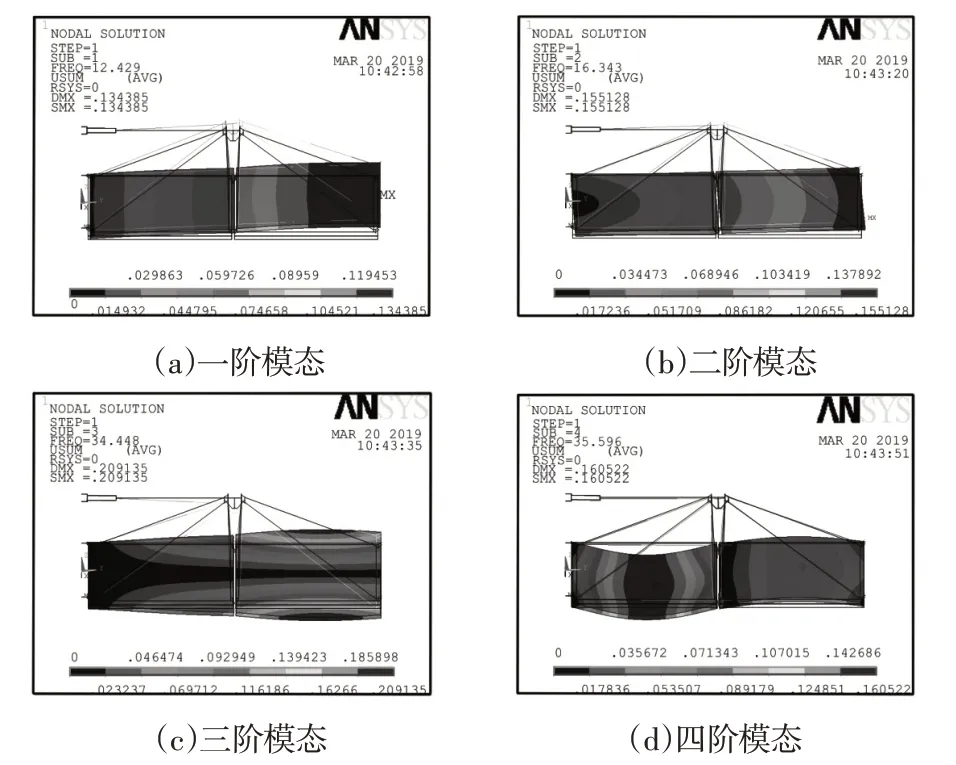
图12 单模块可展天线背架机构前四阶模态振动云图Fig.12 First to Fourth-Order Modal Vibration Cloud of Single Module Deployable Antenna Frame Mechanism
通过振形云图可知,一阶模态机构产生了绕X轴的整体翘起变形;二阶模态机构产生了绕Z轴的整体偏移变形;三阶模态机构产生了绕Y轴的整体扭转变形;四阶模态机构天线面板产生了绕各自X轴的扭曲变形。同理,对含有双模块平面可展天线背架机构进行模态分析,可得到前十阶模态及前四阶模态振动云图,如表3、图13所示。

表3 双模块可展天线背架机构前十阶模态(Hz)Tab.3 First to Tenth-Order Modal of Double Modules Deployable Antenna Frame Mechanism(Hz)

图13 双模块可展天线背架机构前四阶模态振动云图Fig.13 First to Fourth-Order Modal Vibration Cloud of Double Modules Deployable Antenna Frame Mechanism
当模块数为3和4时,可得到机构前十阶模态,如表4、表5所示。振动云图,如图14、图15所示。

表4 三模块可展天线背架机构前十阶模态(Hz)Tab.4 First to Tenth-Order Modal of Three Modules Deployable Antenna Frame Mechanism(Hz)

表5 四模块可展天线背架机构前十阶模态(Hz)Tab.5 First to Tenth-Order Modal of Four Modules Deployable Antenna Frame Mechanism(Hz)
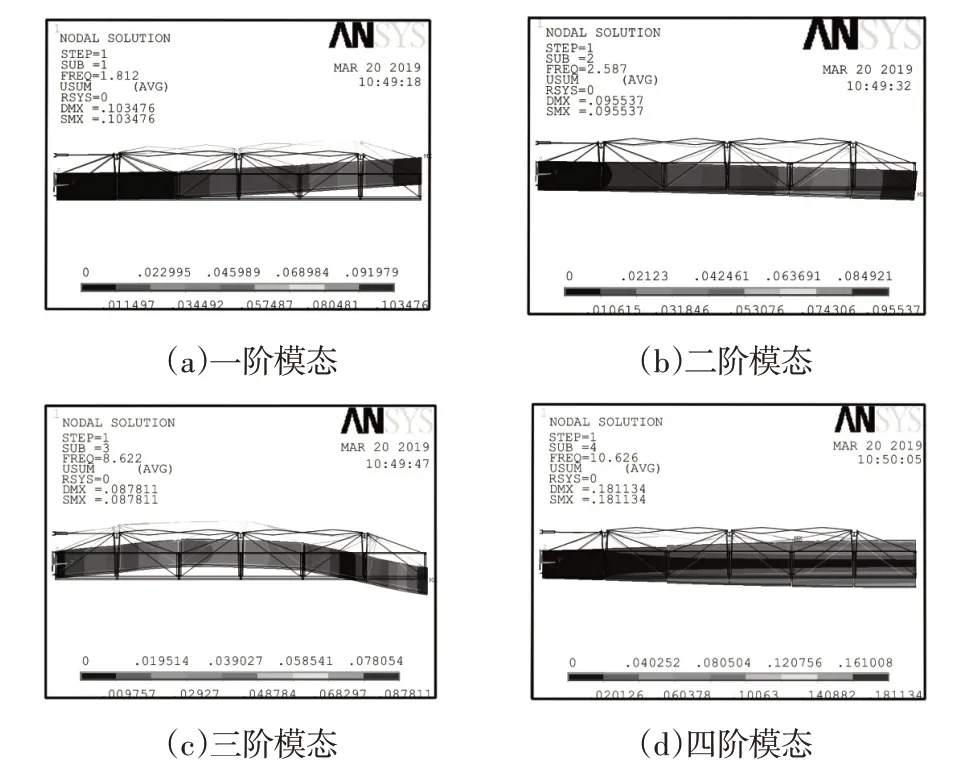
图14 三模块可展天线背架机构前四阶模态振动云图Fig.14 First to Fourth-Order Modal Vibration Cloud of Three Modules Deployable Antenna Frame Mechanism
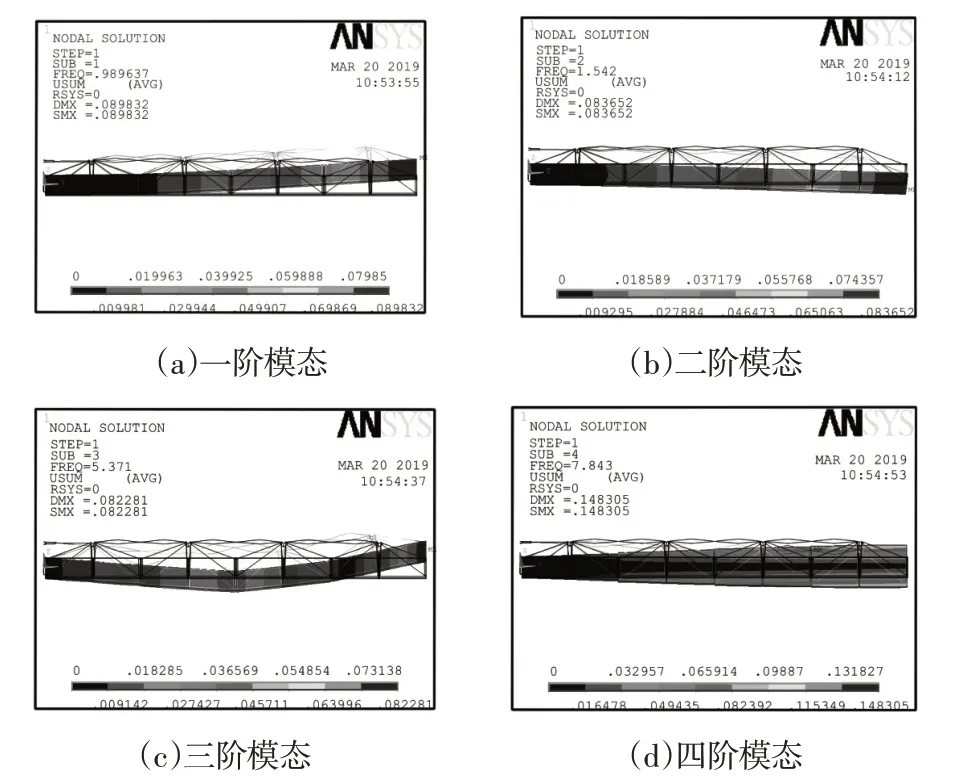
图15 四模块可展天线背架机构前四阶模态振动云图Fig.15 First to Fourth-Order Modal Vibration Cloud of Four Modules Deployable Antenna Frame Mechanism
谐响应是指随时间变化的持续性周期载荷作用在机构上时,将会在机构中产生持续的周期响应。对平面可展天线背架机构进行谐响应分析,用以确定当随时间以正弦函数规律变化的外力作用的机构上时,机构的稳态响应,并得到不同频率载荷作用下,机构的位移响应值对频率的曲线图。通过分析响应曲线,找到机构的共振频率。为验证机构能否克服由外力产生的共振、受迫振动提供有效的理论依据。
由于本课题只需要观察机构某点对于频率的敏感性,所以所施加的周期性外载荷的大小没有具体的要求,只需要在一个适当的范围内就可以,所以本课题所施加的周期性外载荷为1N,方向沿Z轴负方向,作用点分别为:单模块机构第131节点处、双模块机构第267节点处、三模块机构第403节点处、四模块机构第539节点处。四个力的作用点均位于各自机构的末端铰链中心处。外载荷频率分别为:单模块机构(0~90)Hz、双模块机构(0~40)Hz、三模块机构(0~30)Hz、四模块机构(0~25)Hz。在ANSYS中对四个模型进行谐响应分析后,得到四个节点在X、Y、Z方向位移对频率的响应曲线,如图16所示,其中图16中各图横坐标单位为Hz,纵坐标单位为m。分析得到的十二幅图,可以发现机构末端点的位移在机构固有频率处均得到不同程度的放大。由于一阶模态是在Z轴方向的整体翘起变形,所以从图中可以看到末端点对该处固有频率十分敏感,尤其在Z方向的位移量最大。由于第二阶模态是X方向的偏移,所以节点在X方向的位移量放大较为明显。通过以上分析可知,当周期性外载荷的频率与机构固有频率接近或者相同时,机构的振动加剧,甚至达到共振,同时验证了对四个模型模态分析的正确性。

图16 不同模块数的机构位移-频率响应曲线Fig.16 Displacement-Frequency Response Curves of Mechanisms with Different Module Numbers
5 卫星平面可展天线背架热变形分析
由于本课题所研究的平面可展天线背架机构周围的温度场可以近似认为不变,所以在ANSYS软件内对机构进行结构耦合稳态热力学分析。
不同材料相同温度下的热胀冷缩性质不同,所以分别为机构中的三种材料添加热膨胀系数参数,如表6所示。

表6 不同材料的热膨胀系数Tab.6 Thermal Expansion Coefficient of Different Materials
设参考温度为15°C,温度场温度为-50°C,所以温度载荷Δt=-65°C,在ANSYS中对四个模型进行热力学分析,得到热变形云图,如图17所示。
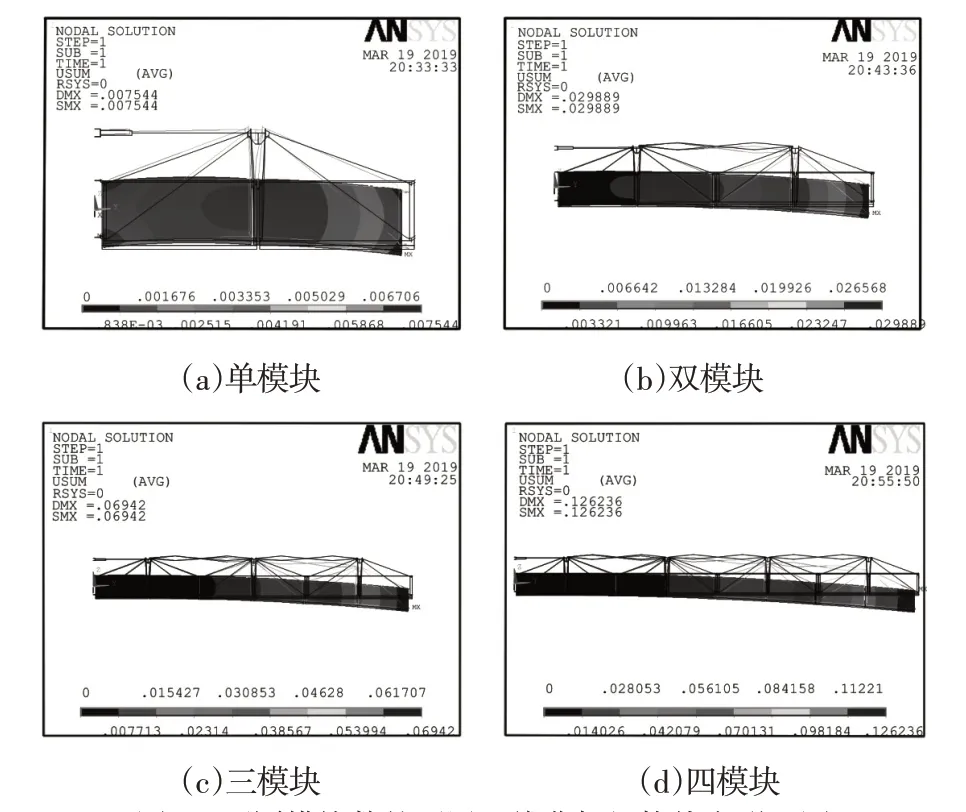
图17 不同模块数的可展天线背架机构热变形云图Fig.17 Thermal Deformation Cloud Map of the Frame Mechanism of Deployable Antenna with Different Module Number
由以上变形图可知,由于温度变化,会使机构发生形变,随着模块的不断扩展,变形会越来越大,且变形主要为沿Z轴方向的变形。
6 结论
(1)这里从机构学的角度,提出了一种卫星平面可展天线背架机构的设计方案,并推导了含有不同可展模块数的背架机构的自由度;
(2)这里建立了平面可展天线背架机构的数学模型,进行了单模块机构的各关节展开角位移随时间变化的运动学仿真分析,并分析了含有(1~4)个可展模块的背架机构展开过程的运动包络;
(3)这里建立了平面可展天线背架机构的有限元模型,对含有(1~4)个可展模块的背架机构进行了模态分析及谐响应分析;
(4)为了适应太空温度变化的恶劣环境,这里对含有(1~4)个可展模块的背架机构进行了热变形仿真分析。