考虑行人跨越障碍物能力的元胞自动机模型*
2022-05-19霍非舟李宇飞马亚萍涂文豪
霍非舟,李宇飞,李 超 ,马亚萍,涂文豪
(1.武汉理工大学 中国应急管理研究中心,湖北 武汉 430070;2.武汉理工大学 安全科学与应急管理学院,湖北 武汉 430070)
0 引言
随着我国经济飞速发展,消费需求也迅速增长,各种购物商场、商业中心应运而生。同时,公共场所疏散出口保持畅通、避免障碍物阻碍通行进而降低疏散效率已成为安全管理常识。
障碍物和通道出口条件会影响通道疏散能力。目前,常用疏散模型主要包括社会力模型[1]和元胞自动机模型[2-3]。Helbing等[4]指出通过在特殊位置设置部分交通设施,可引导正常和恐慌状态下的人群运动;Shivakoti等[5-6]采用动物实验和数值模拟相结合的方法,验证 “对称性破坏”现象;岳昊等[7]考虑步行设施内疏散行人初始位置、数量、多个紧急疏散出口下的行人疏散选择策略、紧急疏散出口通行能力等多个因素条件,构建步行设施的行人紧急疏散出口优化模型;Frank等[8]通过仿真研究安全出口前障碍物对恐慌行人的疏散影响,发现安全出口前存在障碍物并不是有利于所有行人疏散,行人绕行障碍物时选择的疏散路径对减少疏散时间至关重要;Emiliano等[9]提出采用数值模拟方法处理障碍物的先进模型,该模型既保证障碍物的不可通过性,又不需要人为增加其他干预。通过选择合适的障碍物位置与形状,可有效减少行人疏散时间。何栋梁[10]对大型步行设施内的障碍物布局特性进行分析,根据步行设施的设计规范、应用类型、耐火等级等,从疏散空间面积、行人移动距离、移动瓶颈、障碍物布局不平衡系数等4个方面提出评价步行设施存在障碍物条件下的疏散特征指标,并对步行设施内的空间布局提出改进方法;刘天扬[11]通过集群疏散实验发现,出口形式对疏散时间有显著影响。
现有研究中障碍物通常视为不可跨越,行人面对障碍物时需绕行才可通过。在障碍物划分方面:何流等[12]根据障碍物空间占有率大小,将网格分为空地网格、完全障碍物网格、渠化障碍物网格和小型障碍物网格;董力耘等[13]将静态障碍物分为不可穿越和可穿越2种,但并未进一步研究行人跨越障碍物行为对疏散进程的影响;宋英华等[14]将障碍物划分为可跨越和不可跨越2类,同时,让部分疏散人群具备跨越障碍物的能力,但未考虑实际情况中存在部分运动能力较弱但具备跨越障碍物能力的行人。
因此,本文建立1种考虑不同跨越能力的元胞自动机模型,并利用Dijkstra算法计算静态场,通过仿真模拟研究不同跨越能力的行人比例、可跨越障碍物的摆放方式以及在障碍物可跨越的情况下出口状态对疏散的影响。
1 改进的元胞自动机模型建立
1.1 模型介绍
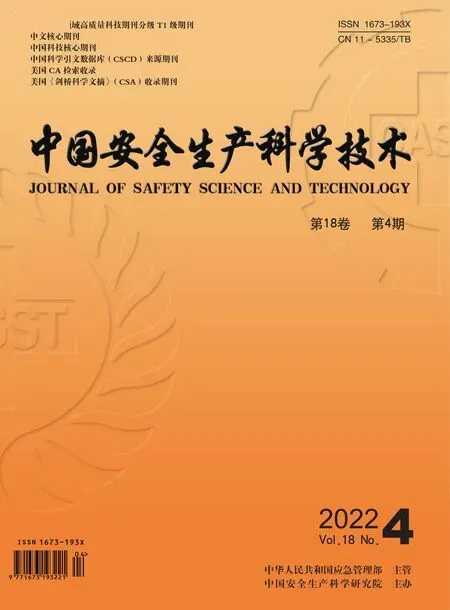
考虑行人不同跨越障碍物能力的元胞自动机模型建立在二维元胞网格内,元胞大小设置为0.4 m×0.4 m的正方形,每个元胞为空或者被障碍物和行人占据。选取2种元胞邻域即Moore邻域与扩展的Moore型邻域,使行人具备不同运动方式,如图1所示。
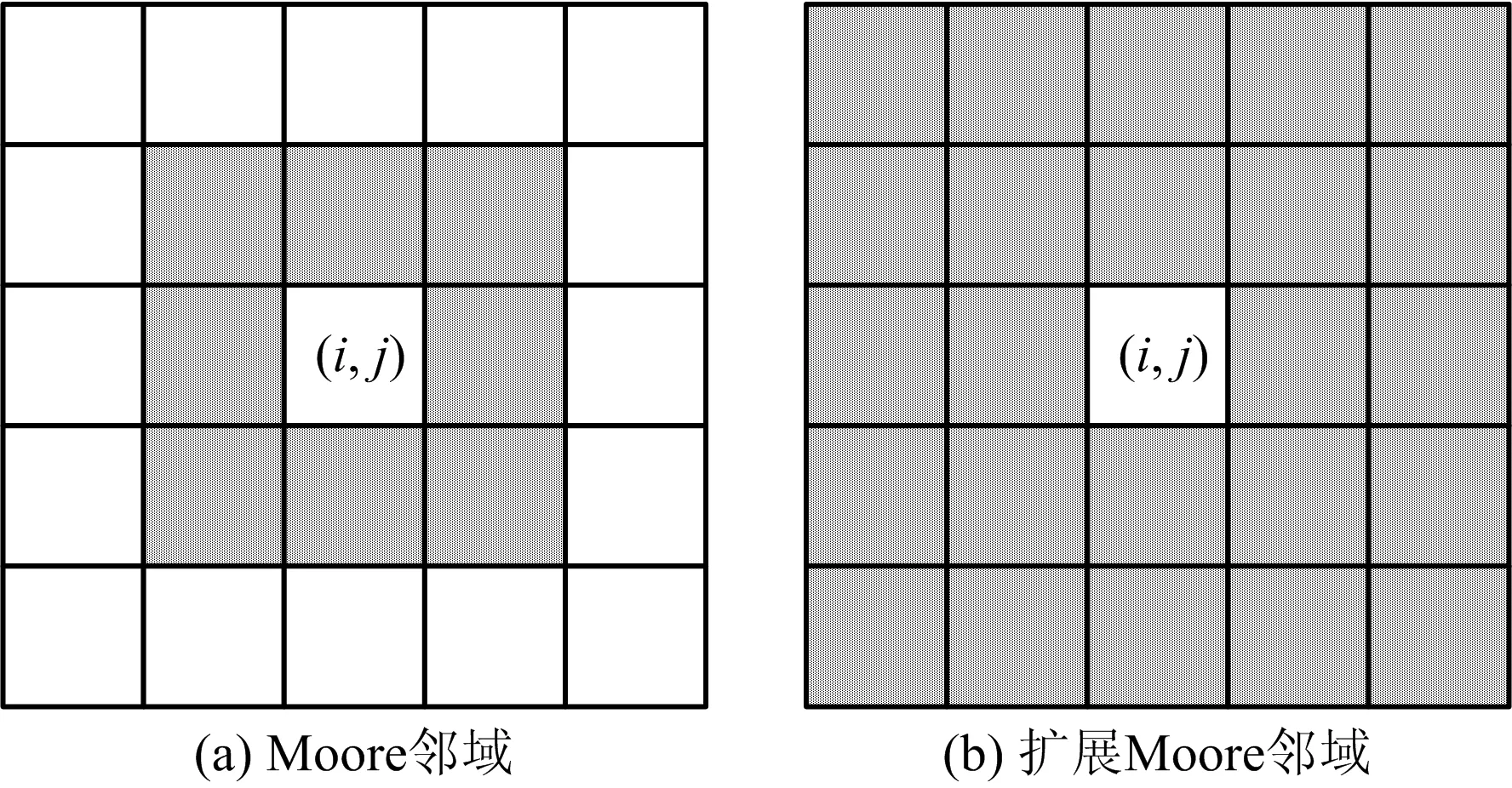
图1 元胞邻域
当行人相邻元胞存在可跨越障碍物时,具有强跨越能力的行人可直接跨越,即按照扩展Moore型邻域确定行人的移动方式,可以在1个时间步移动2个元胞,实现跨越障碍物;具有弱跨越能力的行人当遇到可跨越障碍物时,按照Moore型邻域确定移动概率矩阵,在2个时间步跨越障碍物;不具有跨越能力的行人不可跨越障碍物,需要绕行。
不同跨越能力的行人运动方式如图2~3所示。其中,黑色元胞表示可跨越障碍物,灰色元胞表示行人,白色箭头表示行人元胞运动方向。具有弱跨越能力的行人需要在2个时间步完成跨越,即在t+1时刻位于障碍物位置,在t+2时刻成功实现跨越。具有较强运动能力的人只需1个时间步就能完成跨越。
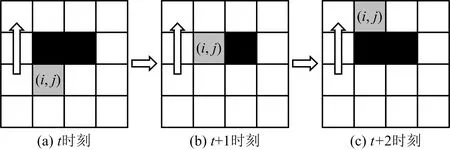
图2 弱跨越能力行人跨越方式示意
图3 强跨越能力行人跨越方式示意
由于场景中存在障碍物,按照Dijkstra算法找出最短路径[15-16]。算法具体包括以下3个步骤:
1)寻找距离起点S最近的未使用点K,将K作为中间点。
2)若其它点经过K到起点S的距离比原距离(不经过K点)小,则将原距离更新为现在的距离(经过K点),将K标记为已使用。
3)重复上述步骤1)~2),直到所有的点均被标记为已使用。
以1个元胞网格数为8×8个元胞且中间存在障碍物的区域为例,如图4所示,计算每个位置的场强大小,其中障碍物和墙壁的危险度大小为Inf,出口危险度为0。由图4可知,相较于传统场强算法所求场强值大小,Dijkstra算法考虑到障碍物的存在,位于障碍物的区域后方和墙壁边元胞的场强要略大,更贴合实际情况。
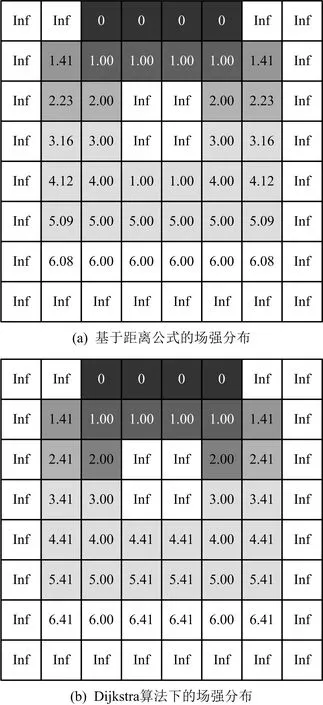
图4 场强分布
此外,将不可跨越障碍物的危险度设为较大定值,可跨越障碍物危险度则设置为不可跨越障碍物的1/2,行人通过危险度等级判断障碍物是否为可跨越障碍物。
考虑以上因素,不具备跨越能力的人员向邻域元胞转移概率Pij如式(1)~(2)所示:
Pij=N-1eKsSij(1-nij)(1-mij)εij
(1)
(2)
(3)
(4)

(5)
(6)
(7)
1.2 行人运动更新规则
疏散人员的运动采用同步并行更新规则,即在每个时间步内,所有元胞同时更新其状态,当2个或2个以上行人想要同时进入1个元胞,按相同概率随机选择1个行人进入,其他行人在原地等待。疏散过程流程示意如图5所示。模型对行人的具体更新规则如下:

图5 疏散过程流程示意
1)初始化人员分布,判断行人相邻元胞是否存在可跨越障碍物,存在可跨越障碍物时部分行人可按不同跨越方式跨越障碍物,其他行人面对障碍物时只能绕行。
2)求得所有行人转移概率,并确定行人下一步的位置。
3)当存在多个行人竞争1个元胞时,随机选择1个行人进入元胞,其他行人则留在原地。
4)当行人移动至出口位置,此行人在下一时间步被疏散出系统。
5)重复步骤1)~4),直到所有行人疏散完毕,结束模拟。
2 仿真模拟分析
模拟场景为行人在某商场的出入口过道疏散时的过程,通道尺寸长×宽为20 m×10 m,对应元胞网格数为50×25个。初始位置障碍物分布如图6所示,初始条件为出口宽度w=7个元胞,即2.8 m,位于居中位置,中间黄色货架视作不可跨越障碍物,绿色为座椅类可跨越障碍物,通过实地调查发现,商场小型座椅通常高度低于0.3 m,行人在疏散过程中有一定概率朝出口方向跨越过去,前后相邻的两可跨越障碍物距离为4个元胞。改变可跨越障碍物与墙壁的距离、行人密度和出口的宽度,研究在不同行人密度条件下,不同障碍物摆放形式和出口条件对疏散时间的影响。可跨越障碍物与两侧墙壁的距离设为s,行人密度设为ρ,出口宽度设为w。

图6 初始位置障碍物分布
可跨越障碍物的行人比例为p=p1+p2。其中,p1表示具有强跨越能力的行人比例,而p2表示具有弱跨越能力的行人比例。具有强跨越能力的行人为大部分的青少年男性和少部分运动能力强的女性;具有弱跨越能力的行人为大部分中年男性和青少年女性、以及少部分老年人;不具备跨越障碍物能力为大部分老年人和儿童。为减少误差,所有数据均模拟仿真60次,取其平均值。累计行人疏散人数随时间步变化的曲线选取最接近平均值的1次模拟数据。
2.1 跨越障碍物人群对疏散过程的影响
分析具有不同跨越能力的人所占比例,即p1和p2的值对平均疏散时间的影响,其中不具备跨越障碍物能力的行人占比设置为恒定值30%,则p2=0.7-p1。
疏散时间步随p1的变化如图7所示,当行人密度ρ≤0.4时,p1和p2的取值对疏散时间几乎没有影响,这是因为此时行人密度较小,人员跨越障碍物的需求较小,所以改变p1和p2的值对疏散时间影响可以忽略。当行人密度增大,即ρ≥0.6时,行人跨越障碍物的需求较大,疏散时间随p1的增大逐渐减小,在p1=0.3达到最小;而当p1继续增大,疏散时间又开始增加,这是由于此时行人跨越能力增强,会在出口处形成拥堵,导致疏散时间增加。由此可知,p1=0.3和p2=0.4时,行人疏散效率最高。
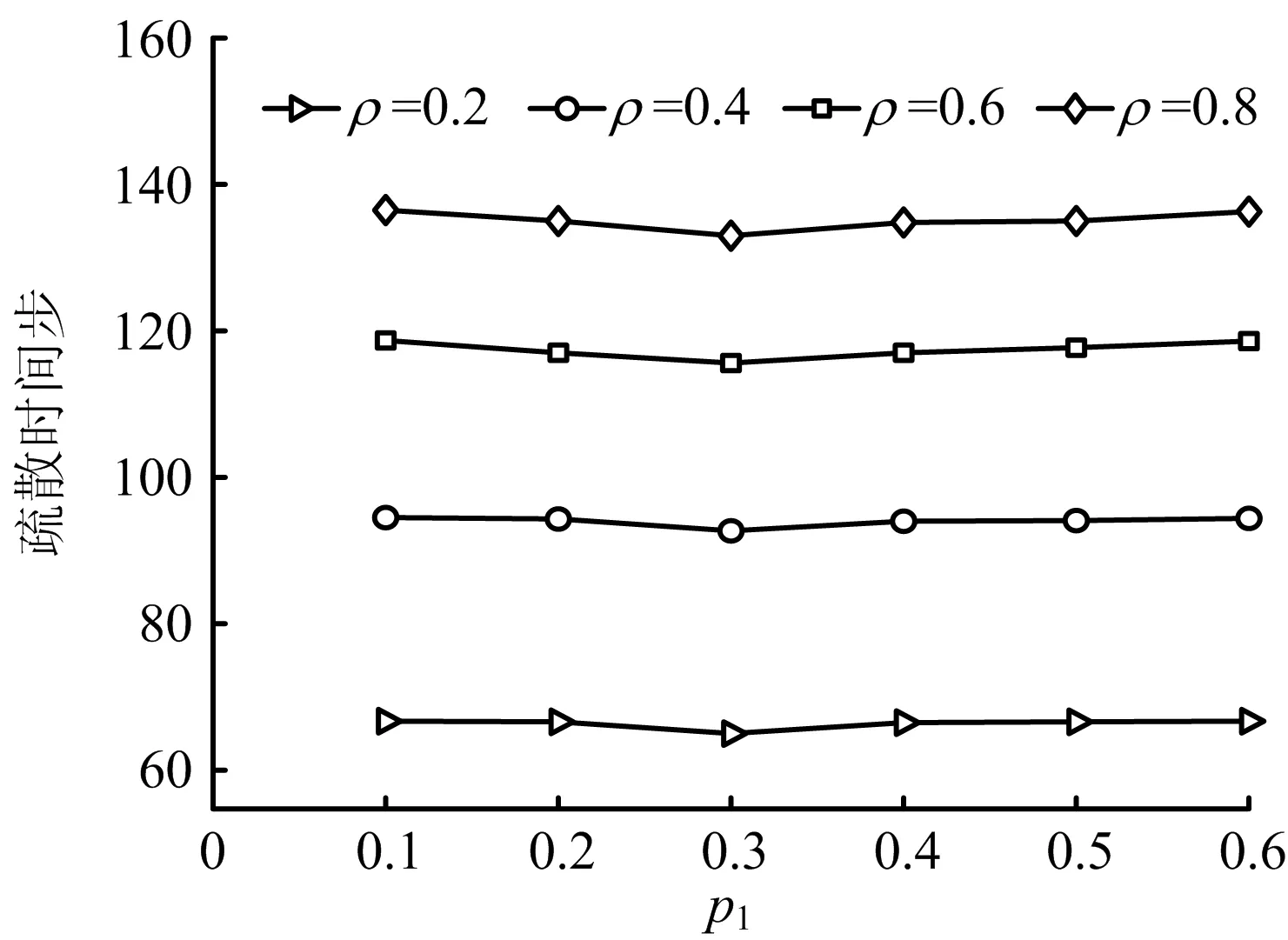
图7 疏散时间步随p1的变化
选取p1=0.3,p2=0.4为初始值,设置行人密度ρ=0.5,分别对行人存在跨越行为和不存在跨越行为的2种情况进行模拟,如图8所示。由图8可知,当存在可跨越障碍物行人时,疏散时间相应减小,平均疏散时间相比减小1.43%。但总体疏散时间减小不明显,这是因为可跨越的障碍物宽度较窄,障碍物对行人的影响较小。

图8 初始条件下行人是否跨越障碍物对疏散的影响
障碍物长度为4个元胞以及行人是否跨越障碍物对疏散的影响如图9~10所示,当增大障碍物宽度至4个元胞时差异更加明显,并随s值增加不断增大,平均疏散时间减小9.1%。这表明考虑行人存在跨越障碍物行为时,行人通过障碍物的能力更强,对于疏散过程起到促进作用。

图9 障碍物长度为4个元胞分布

图10 障碍物长度为4个元胞时行人是否跨越障碍物对疏散的影响
2.2 行人密度对疏散时间的影响
通过改变过道内疏散行人密度ρ,在不同密度条件下,疏散时间随障碍物位置变化如图11所示。当行人密度ρ=0.2时,可跨越障碍物距离墙壁的距离在5个元胞以下时,s的大小对疏散时间影响较小,这是因为此时行人密度较小,而疏散行人主要集中在中间位置,当s≤5时,可跨越障碍物对行人没有起到阻碍作用;当s≥6时,行人就会有跨越障碍物的需要,所以导致疏散时间突然增加。当行人密度ρ=0.4时,随行人增多,过道中间位置容纳不了这么多行人,开始向两边扩散,可跨越障碍物距离墙壁较近时也会对行人疏散起到阻碍作用,疏散时间随s的增加逐渐提升。当行人密度ρ为0.6,0.8时,疏散时间随s增加不再发生显著变化。这是由于此时行人密度足够大,无论可跨越障碍物距离墙壁多远,都会对行人起到阻碍作用,所以障碍物的摆放情况对疏散时间的影响不明显。
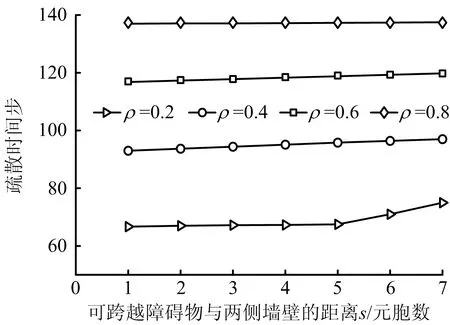
图11 可跨越障碍物与墙壁的距离对疏散时间的影响
障碍物位置对疏散时间的影响结果如图12所示,可以看到在4种s值不同的情况下,随密度增加平均疏散时间逐渐延长,4条曲线变化趋势基本一致。除此之外,初始行人密度越大,完成疏散所需时间越长。
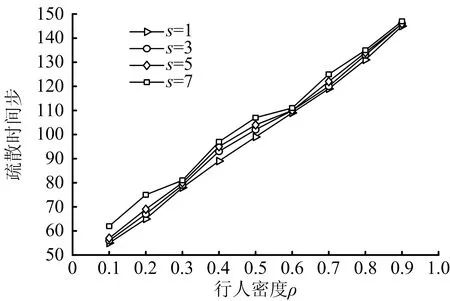
图12 障碍物位置对疏散时间的影响
2.3 出口大小对疏散时间的影响
选取密度ρ=0.8的场景,分析出口大小对疏散时间的影响,出口宽度选取w为5,7,9,11。疏散时间步随出口大小变化如图13所示,当出口宽度为5个元胞和7个元胞时,疏散时间差距较大,相较于w=5,7时,平均疏散时间减小16.3%。但当出口宽度为9个元胞时,相较于7个元胞,平均疏散时间仅减小4.1%,疏散时间几乎相等。将出口宽度w从9个元胞增加到11个元胞宽度时,平均疏散时间仅减少3.2%。
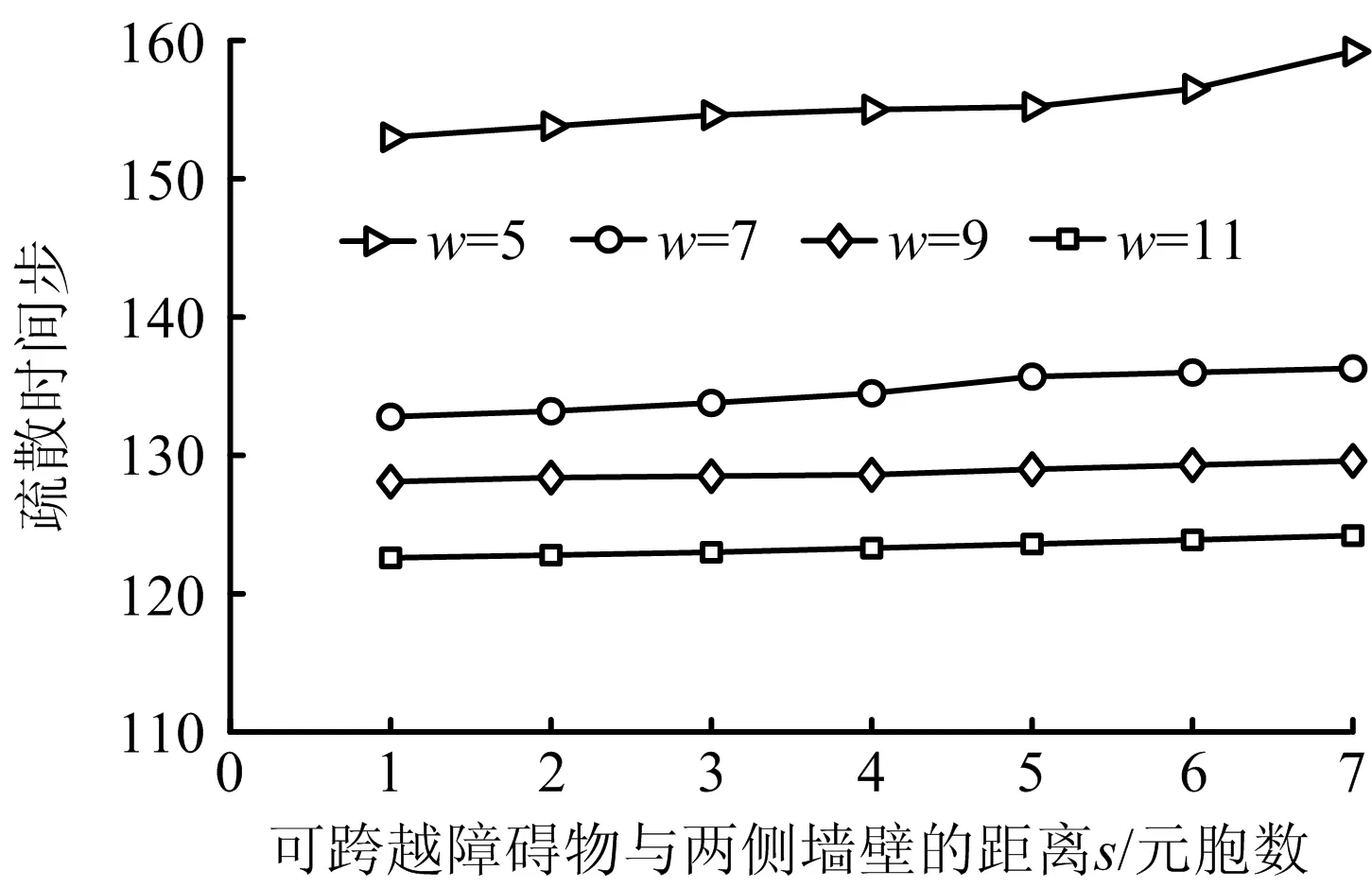
图13 疏散时间步随出口大小的变化
不同出口条件下行人分布如图14所示。由图14可知,在不同出口大小条件下的行人分布情况,其中过道内浅绿色的元胞表示存在行人,在Step=90时,w=5场景下行人在出口处形成拥堵,而w=7,9,11时,并无拥堵现象的发生。可以得到出口大小w=7时,能容纳行人通行数量基本达到饱和,已经满足该商场过道的疏散条件,再增加出口大小对疏散过程影响较小。

图14 时间步为90时不同出口条件下行人分布
不同出口宽度下疏散人数随疏散时间变化结果如图15所示,选取s=5的情况观察,时间步Step<50时,曲线是基本重合的,在Step=50时,w=5的曲线开始分离,而w=7,9,11的3条曲线距离较近,可以推断出拥堵是在Step=50时开始形成的,对疏散过程产生明显的阻滞作用,导致疏散时间增加。Step=120时,w=9,11的曲线斜率开始下降,说明此时随疏散行人的变少,出口利用率开始降低。

图15 不同出口宽度下疏散人数随疏散时间的变化
3 结论
1)存在跨越行为的元胞自动机疏散模型可以区分具有不同跨越能力的行人,模拟过程更加符合实际情况。
2)考虑行人的跨越障碍物行为时,可有效减小拥堵,提高疏散效率;当具有不同跨越能力的行人所占比例达到一定值时,疏散效果最佳;同时,可跨越障碍物越长,跨越障碍物行为对疏散效率的提升越明显。
3)在不同障碍物摆放情况下,改变行人密度,行人疏散变化规律基本一致。随行人密度增大,疏散时间均匀增加。当行人密度较小,可跨越障碍物放置在靠近过道中间位置时会对疏散有明显的阻碍作用。
4)出口宽度较小时,行人会在出口位置发生拥堵,严重影响人员疏散效率;当出口宽度达到一定值时,出口拥堵现象消失,此时继续增大出口宽度对疏散时间的影响较小。