一种羽流试验液氦热沉外流程技术研究
2022-05-19王惠颖米辉耀高洪如
王惠颖,王 涛,米辉耀,高洪如
(北京航天试验技术研究所,北京 100074)
1 前 言
空间环境模拟器可以模拟太空真空环境、太阳辐照环境和冷黑环境,从而进行整星或分系统热真空试验[1]。冷黑环境的实现主要通过外流程供应系统将液氮、液氦等低温介质输送到真空舱内的热沉中,使热沉的温度低于10 K。本文介绍的某羽流试验台采用液氮外流程、液氦外流程来供应低温介质,供给热沉、羽流吸附泵及真空系统使用,采用气氮外流程在试验后进行系统复温。
2 系统组成
羽流试验台主要由羽流试验舱(真空舱)、液氮液氦热沉、抽空系统、羽流吸附泵、外流程系统、工艺气液路、测量控制系统等组成。试验中使用抽空系统使试验舱内达到预定真空度,模拟真空环境,使用外流程系统供应低温介质模拟冷黑环境。
3 液氦外流程工作原理
液氦外流程采用开式沸腾方式,用来为液氦热沉及羽流吸附泵提供低温预冷和工作时需要的液氦。主要由液氦罐、真空管路、调节阀、气动阀、安全阀、压力传感器、温度传感器等组成。在用液氮将热沉预冷到100 K时,用氦气置换热沉和管路中的氮。氦气罐内氦气经减压阀、气动隔离阀进入进气管路,而后分4路分别进入液氦热沉1、液氦热沉2、液氦大门热沉和羽流吸附泵,打开热沉各路出口管路上的调节阀和总管路上的气动阀,将液氮和氮气吹除出热沉,经管路后放空。
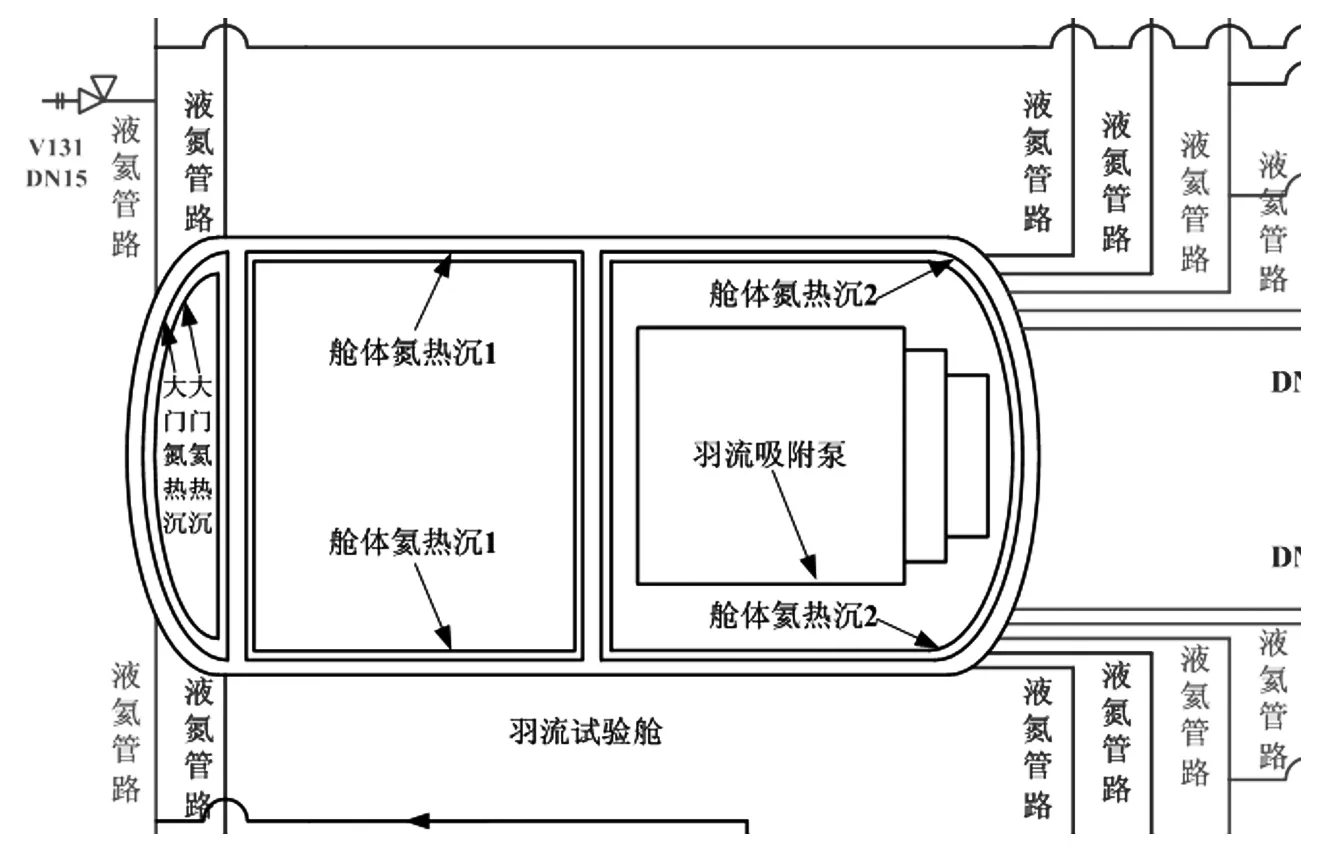
图1 羽流试验舱
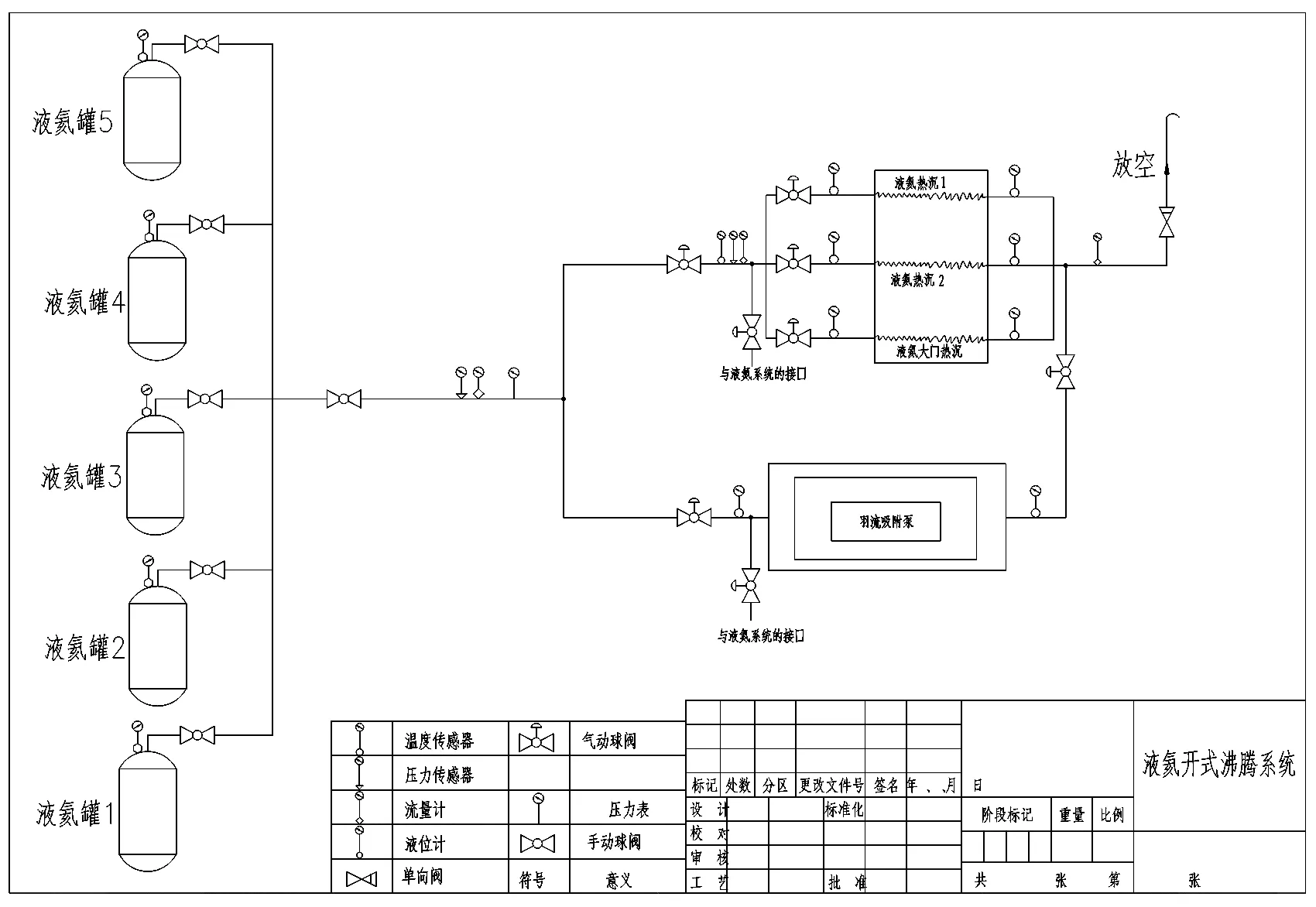
图2 液氦外流程系统原理图
液氦外流程采用5个液氦罐并联供液,打开液氦杜瓦的节流阀,通过快速接头,液氦经自增压进入外流程,打开各路管道上的手动阀,分4路分别进入液氦热沉1、液氦热沉2、液氦大门热沉和羽流吸附泵。通过监控4路热沉前后端温度传感器的温度信号,调节热沉出口端的薄膜调节阀,实现热沉从100 K预冷至10 K,后通过总管路上的气动阀,将氦放空。而后系统开始工作,继续通入液氦,维持液氦热沉和羽流吸附泵出口温度10 K,连续工作2 h后,关闭液氦热沉和羽流吸附泵进口端手动截止阀,热沉出口处氦流经液氦隔离阀和总管路上的气动阀,放空。由于每路热沉以及羽流吸附泵的高度流阻不一样,在同样的入口压力下,各路的流量有差异甚至无液氦流过。在各个流路出口设置调节阀,实时调节各路的流量达到控制温度的目的。此外,在4路热沉出口端管路上安装安全阀,保护系统。
4 测量控制系统
测量控制系统主要完成液氦管路上流量、压力的测量,热沉进出口温度、特征点温度的测量及液氦罐状态参数的测量。测控系统原理如图3所示。
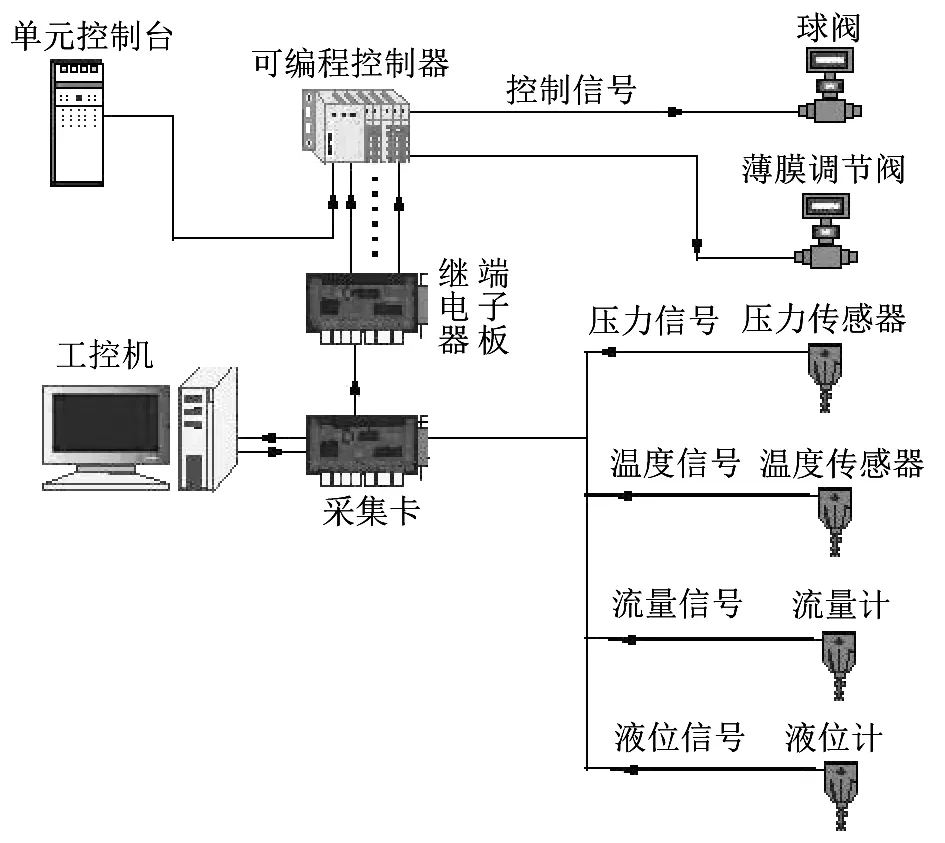
图3 液氦循环系统测量控制系统
为满足测量要求,在系统相应位置,如:压力传感器、温度传感器、流量计、液位计等前端测量设备。
前端传感器产生的信号经过调理模块的滤波和隔离放大后由采集板接收。模拟采集卡采用台湾研华PCL多功能板,设计有1 KB FIFO缓存器数据传输块;16路SE模拟输入或8路差分模拟输入;数字量输入输出通道分别为16路、16路,兼容TTL/DTL;板载1路模拟量输出以及1个8254兼容定时/计数器。
阀门的开启、关闭由控制台进行单元控制。当接通相应阀门的单元控制开关后,产生的输出量信号送给固态继电器控制电路的通断,实现对二位五通电磁阀的开关控制,从而完成气动球阀操纵气的控制。
5 结 论
热沉外流程供应系统包含液氮、液氦、气氮3个外流程系统,工艺系统各设备工作协调性对于环境模拟至关重要。在项目建设中除考虑各系统工艺合理性、经济性外,还需统筹考虑各系统间的衔接问题。