三维激光扫描技术在新首钢冬奥项目中的应用
2022-05-18银振华
银振华
(北京首钢国际工程技术有限公司, 北京 100043)
0 引言
新首钢园区在服务冬奥的基础上保留自己原有的钢铁工业气息,对既有的工业遗址设施进行改造利用,将工业和冬奥两种文化互相交融,形成时代的标志。
工业设施(包括工业建、构筑物)改造和再利用的首要任务便是对现有设施结构的测绘,冬奥项目启动初期,面对单体量大、规模大、原始图纸缺失的首钢工业遗址,采集基础数据成了大难题。北京首钢国际工程技术有限公司于2014年在冬奥组委办公地首钢西十筒仓改造中,率先引进了三维激光扫描技术,并将其应用到了冬奥项目工业设施的改造测量工作中。目前已经开展三维激光扫描项目40余项,扫描各类异形工业设施达到350项,合同额达1500万元,打通了三维扫描技术流程。本文在三维激光扫描技术的基础上,通过冬奥配套服务项目(金安桥站交通一体化及工业遗存修缮)扫描测绘的实例,详细研究了三维激光扫描获取数据的流程、数据处理以及成果形成的方法。
三维激光扫描技术,又称实景复制技术,是近年发展起来的一项新型的立体测绘技术,可以深入到复杂的现场环境中,进行扫描操作,能够快速、自动化、全方位、非接触、高精度、大面积、高分辨率且海量地获取被测对象的三维坐标,构建出被测对象精准的三维立体模型[1]。
利用三维激光扫描技术可实现工业设施的数据采集和现状平、立、剖面图绘制,为研究改造工作提供准确、翔实的数据,是工业遗址改造服务冬奥的一个重要环节。其内容涉及工业设施的四至关系、地形、面积、形状、高度、门窗位置、尺寸、内部柱梁平面尺寸及定位、立面、截面及其彼此间的搭接关系,桁架、天车、轨道等的位置、标高等[2]。传统的工业设施测量主要为二维平面测量,基本采用全站仪配合钢尺量距的方式完成,为单点测量,其数据缺乏整体性。随着科学技术的发展,建设方、设计方在要求测绘人员绘制出建构筑物平、立、剖面图的同时,提出了三维建模的需求,即将工业遗址的空间点位数据和纹理影像数据完整、真实、准确地搬到计算机中,建立数字档案,为工业遗存的存档、保护、修复、设计提供技术支持[3]。同时,在实际工作中,作业员也经常遇到工业设施年久失修,阶梯、通廊等严重破损的情况,存在爬上爬下的安全隐患,而三维激光扫描技术的引进,既提高了工作效率,同时也降低了安全隐患。
1 工程应用实例
1.1 工程简介
冬奥首钢工业遗址公园(金安桥站交通一体化及工业遗存修缮)项目是充分利用首钢独特的工业遗迹资源及区位优势,以服务冬奥为契机,打造集高端数字智能、工业文化创意、服务冬奥配套等为一体的高端办公区、冰雪运动与康体运动娱乐休闲区、旗舰店/主力店为核心的文化娱乐区。该项目位于北京市石景山区新首钢高端产业综合服务区东北角,总占地面积为18.6 ha。其中,建设用地面积为13.3 ha,代征绿化用地面积为5.1 ha。
该项目的工业设施大部分于1949年建成投产,2010年停产,历经多次改造,工业设施与原设计已有多处不符的情况,原设计图纸不能作为改造依据。遂在本次工作中采用三维激光扫描技术来获取原始数据,重新将建筑设施还原,解决设计改造工作的前期难题。
本次测绘的主要内容包括工业建筑设施的单体测绘,以及通廊桁架位置关系和详细尺寸。根据建设方以及设计方对测绘内容及单体要求,拟定了三维激光技术与传统工程测量技术相结合的方式,利用三维扫描技术满足单体平、立、剖面尺寸,层数,层高,柱子和梁尺寸,结合三维模型丰富的成果质量。采用传统测量完成总图定位测量,同时校对检查三维扫描成果[4]。
1.2 整体思路与技术路线
整体遵循先控制后细部的原则,建立测区控制网后,通过全球定位系统(global positioning system,GPS)、全站仪、水准仪联测厂房外部已知点,在工业设施内外部设立足够数量、精度可靠的控制点,通过地面三维激光扫描技术手段获取工业设施整体三维点云数据,制作工业设施各位置点云剖面,通过特征提取,整理出一系列设计及施工用到的计算机辅助设计((computer aided design,CAD)成果,并进行三维原始数据留存。工业设施整体平面图精度小于5 cm,重点部位点云精度为2 mm。
2 工程实施
三维激光扫描的目的是获取被测物体的三维轮廓数据,进而快速重构出目标的场景三维模型及线、面、体、空间等各种制图数据。主要包括数据采集与数据后续处理等过程。第一步数据采集包括建立控制网以及现场扫描等工作,第二步数据处理包括点云拼接、坐标转换、点云覆色等,最后在应用数据方面包括建立表面模型、纹理映射、输出到CAD等。具体流程如图1所示。
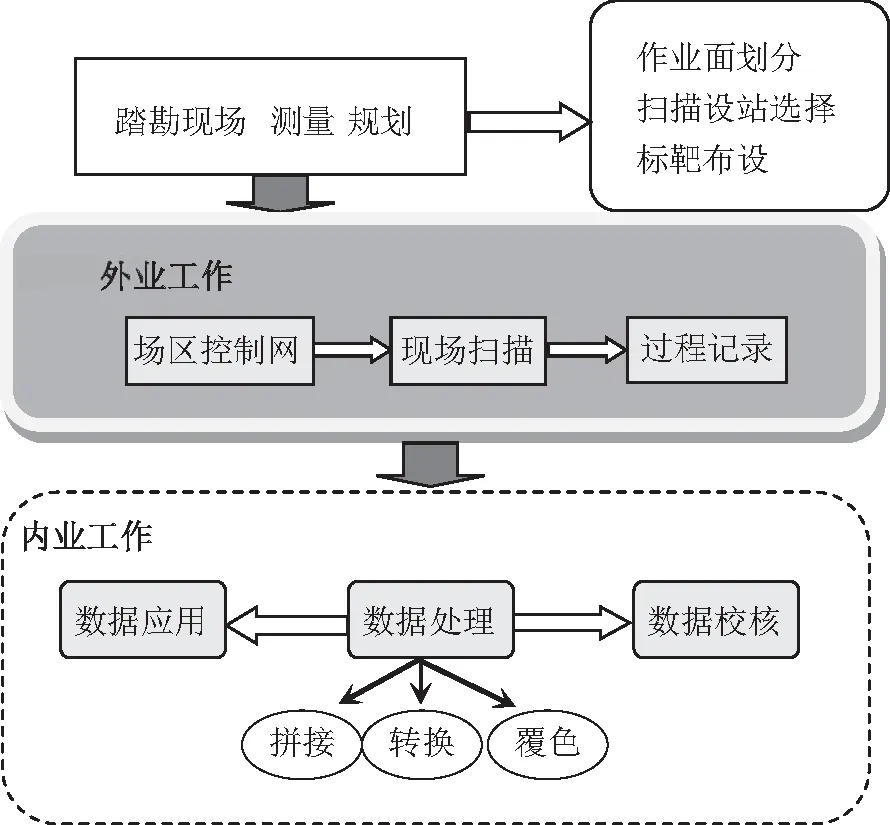
图1 工作流程图
2.1 控制测量
控制测量是工程建设中各项测量工作的基础,是三维扫描工作的基准和框架,目的是精确测定控制点和部分关键点的三维坐标,保证测量坐标系的一致。
本次工程采用全球导航卫星系统(global navigation satellite system,GNSS)连续运行参考站网虚拟参考站(virtual reference station,VRS)技术,布设工程平面控制点。采用直接水准方式,布设工程高程控制点。
精度等级设置为平面控制二级、高程控制三等。工程采用GPS实时动态载波相位差分技术(real time kinematic,RTK)+全站仪极坐标法相结合的方式进行建构筑物单体总图定位工作,采用激光三维扫描方式进行建构筑物单体之梁、板、柱、架的平、立、剖面尺寸测绘。
2.2 三维激光扫描测量外业实施
在先期对项目内各个单体建筑及设备设施周边进行控制测量的基础上,采用三维激光扫描技术对建构筑物单体等设备设施进行全方位精确的三维激光扫描,形成构筑物及其设施的整体点云数据和影像数据,再经过特征提取,获取建、构筑物各个部件的三维精确尺寸,生成设计方需求的平、立剖面图,完整地表现各种设备设施的尺寸信息和搭接关系,提供精准数据,完成三维原始数据留存工作,并进行三维建模[5]。
对于大规模的三维扫描作业,在外业实施过程中,应做好扫描过程记录,记录内容包括测站与控制标靶的对应关系,测站站号对应需要校核的结构(梁、柱、门窗、洞口等),以便后续数据处理与检核。
2.2.1整体扫描
在本次工程中,为保证待测物整体范围内数据精度的准确,扫描前期进行了靶纸与控制测量点的联测工作。工业设施内整体地形、地物、屋顶、桁架、柱体、铁路、沟道,选择使用Faro 3D X330扫描仪进行扫描,该扫描仪主要特点为外形小巧、拼接方便、轻便实用。扫描过程中,为保证扫描仪设置测站间隔控制在8~15 m,在坑体、铁轨等地物附近另设加密扫描,以确保数据的完整性。为满足数据拼接精度,扫描过程中扫描仪设定在1/2模式下高精度扫描,确保了扫描数据的点间距控制在3 mm以内。工业设施内部整体平面扫描外业共进行30 d,架设测站340处,原始数据量达350 GB。
2.2.2单体细部扫描
工业设施内关键柱体及桁架、鱼腹梁等构件使用法如350型扫描仪的使用方法进行扫描。该扫描仪测量精度高、扫描速度快,还具有一系列辅助功能。为保证厂房整体范围内数据精度的准确,扫描过程前期选取单体工业设施内6处布设反射片,与控制测量进行联测。重点工业设施扫描外业共15 d,架设测站200余站,原始数据量达120 GB。
2.3 点云数据处理
点云数据处理的完整过程包括点云数据预处理、测站拼接、实体模建立、数据结果的输出等步骤。对三维点云数据进行预处理,一般需要对获取的原始数据进行再加工,检查数据的完整性及数据的一致性,进行数据格式的规范化、进行点云去噪、配准、抽稀、分块和导出等操作[6]。
2.3.1数据预处理
在进行配准之前,首先要进行数据预处理。因为在扫描物体时,由于遮挡等原因,采集的数据不只是我们需要的数据,其中还包括很多我们不感兴趣的数据,例如,物体周围的花草树木、车流、人群等,这样就必须在配准之前,利用数据的预处理功能把我们感兴趣的数据提取出来。预处理的方法很多,可以利用激光强度把同一类物体同时选中后删除、人工选取等方法。去除噪声剔除冗余数据的过程是,逐站将激光扫描数据导入点云处理软件,通过软件的过滤功能自动去除噪声点云,得到滤波点云数据。
2.3.2测站拼接
将三维激光扫描仪获取的原始点云数据导入到仪器自带点云处理软件中,设置拼站参数自动进行站点拼接,这个过程叫作数据配准。
每一个视点的数据都有一个独立的测站坐标系,数据配准就是把不同视点的数据统一到一个坐标系下,使之成为一个整体。三维激光数据配准一直是地面三维激光技术的重点和难点,配准的精度直接影响到后期成果的精度。根据工程特点,地面三维激光数据配准方法大致分为两种,一种是基于特征的数据配准,另一种是迭代数据配准。根据工程特点,路线较为复杂,测站布置相对密集,选用特征标靶球配准,能够更好地提高配准精度。
另外,把点云整体作为一种特征来一起参与计算,要比单独使用标靶计算精度要高。
2.3.3坐标转换
点云配准完成后,点云的坐标系为扫描仪测站的自定义坐标系,在进行平、立、剖面的绘制之前,需要进行坐标系转换,把点云坐标转换在控制坐标系中。本次工程区域较大,工作周期相对单体建筑扫描较长。为改善工作进度,提高质量降低整体区域平面误差,在控制测量的环节中增加反射靶盘,对于区域四角的建筑设施,以及核心区的重要设施采取多点标靶控制,增加转换参数的个数,提高转换质量。
2.4 数据提取及出图
经过转换坐标的点云就是真实的场景加载拟定坐标系的三维坐标,点云是扫描成果文件,是表达目标空间分布和表面光谱特性的海量点集合。具有可量测性、光谱性、不规则性、高密度性、表面性。包含imp、rwp、rsp、asc、xyz、ptc、txt、pol等多种数据成果格式。鉴于点云特点以及数据格式的多样性,使得在成果输出阶段可提供更多的方法。本次以直接导出点云为例,配准后的点云数据和影像数据,根据实际需要使用相应的专业软件即可制作点云剖面图,主要步骤如下:
(1)根据数据情况进行点云抽稀,在满足建模精度的条件下减小数据量,并加载整体数据。
(2)在专业软件内基于建构筑物本身特征和扫描仪坐标系,转换北京地方坐标系。
(3)根据需求在建构筑物特定位置制作点云剖切,形成点云剖面
(4)最终把点云剖面转换成xyz格式。
由上述步骤制作的点云剖面在cad中打开,转好相应的视图直接进行特定建构筑物平立剖面的绘制并最终提交成果。
2.5三维数据建立模型
三维激光扫描仪所得到的点云模型,是由空间不规则的离散点构成的,这些点云之间并没有构成建筑物的实际表面,所以要得到建筑物的有拓扑关系的真实表面,还要通过特殊的算法来恢复建筑物表面的这种拓扑关系,构建建筑物表面三角网模型就是其中一种比较简单而实用的方法[7]。
由于三维激光所采集的数据是数以万计的三维离散点,因此在进行三角网建模时,就难免会产生数据冗余,一个平面P在正常的情况下,可以由两个三角网构成,但是由于点云过于密集,所以生成的三角网往往会远远多于两个,这样就无疑造成了数据冗余,所以在构建三角网之后还要对建筑物的三角网模型进行数据简化[8]。
实体模型也是基于建筑物点云模型构建的。实体模型和三角网模型一样,也是建筑物模型的一个形式,但是二者有很大的区别:三角网模型表现建筑物更精细、准确,但是数据量较大;实体模型表现建筑物没有三角网模型那样精细,但是数据量很小。所以构建一个建筑物的模型时,为了更精确地表现建筑物,最好把二者结合起来,建筑物复杂的地方(如板、梁、柱)可以构建三角网,比较简单、规则的地方(如建筑厂房)可以构建实体模型[9],如图2所示。
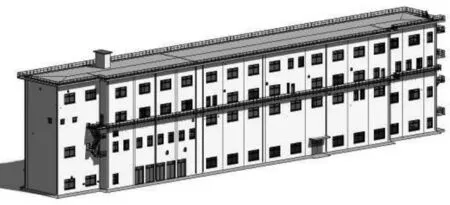

图2 点云与实体模型
2.6 成果检核
本次工程采用全站仪极坐标法、钢尺测距法、直接水准法等多种模式对金安桥工业设施成果数据进行了检核[10-11],水准全线复核,手持激光测距仪量校尺寸40处,全站仪测点80个,精度全部符合规范要求,如表1所示。
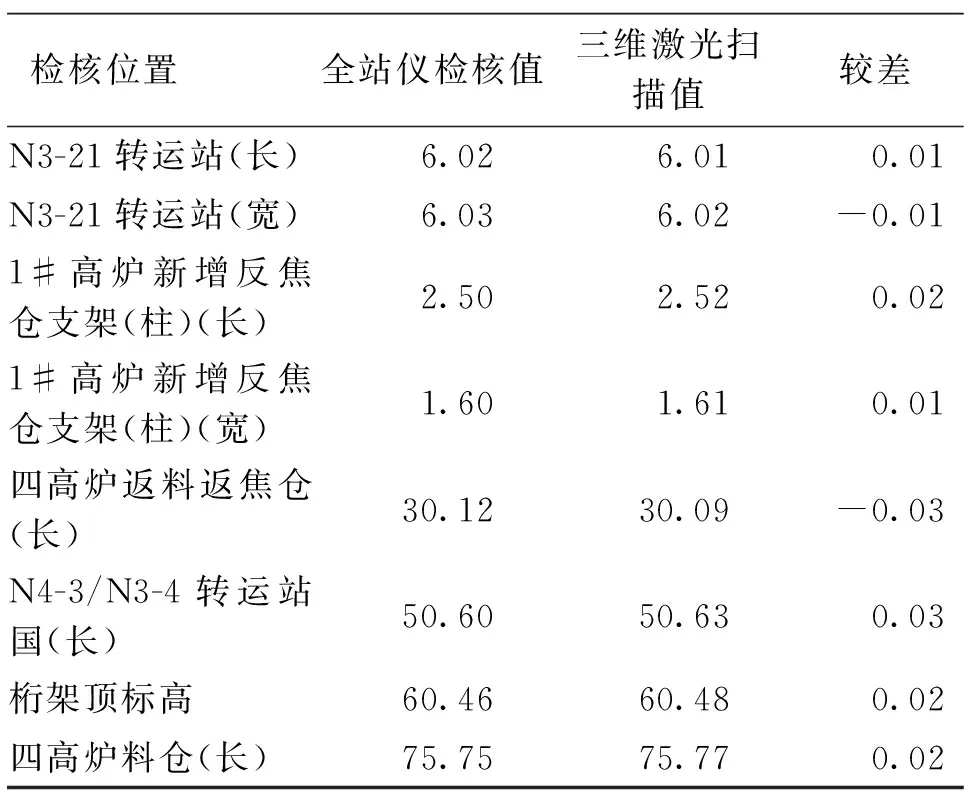
表1 尺寸校核检查表 单位:m
3 结束语
拥有8年三维扫描技术经验的北京首钢国际工程技术有限公司,在新首钢园区工业设施改造中采用三维激光扫描技术,对老旧工业设施,尤其是没有图纸的,或者原图纸变更较大的设施进行扫描测绘,根据不同设计单位的需求提供了工业设施的二维线画图、三维点云模型、三维模型等产品。成果提供给国内知名设计单位,如中国建筑设计院、北京建筑设计研究院、中联筑境设计院进行设计,获得好评。在三维激光扫描技术方面积累了丰富的工程经验,有以下经验可以在工业区建筑改造可进行复制推广:一是三维激光扫描技术将工业遗存资源数据获取由三维全息数据取代单点采集二维数据,丰富了数据信息,成果有巨大的应用潜力;二是三维激光扫描技术提高了测绘效率和获取数据的精度,为老旧工业资源改造提供了海量的基础数据,是工程顺利改造的技术支撑;三是三维点云数据及其衍生成果具有更多的应用价值。
依据新时期测绘行业“两服务、两支撑”的工作定位,下一步将在实景三维方面展开探索,配合已有的技术,研究局部实景三维的构建。
