掌握核心技术,玩转穿越机
2022-05-18山东省青岛市西海岸新区第一高级中学高一14李金河
◆山东省青岛市西海岸新区第一高级中学高一(14)班 李金河
穿越机广泛应用于影视剧拍摄、战地侦察、娱乐竞技中,也因此激起了许多模友的兴趣。但穿越机零部件价格昂贵,让部分模友望而却步。2020年7月,网络平台禁售穿越机配件的时间长达两个月,这件事也让我意识到了掌握穿越机核心部件技术的重要性。于是,我开始了穿越机飞控板的研发与制作。
一、电路图的设计与电路板的制作
“万里电路凭图起”,电路图中的任何微小差错都会导致整体失败,甚至造成元器件烧毁。因此,我花费了较长时间设计第一版电路图。
刚开始,我用最常用的检查断路的方法,逐一测试飞控板的布线顺序。然而,这种方法难以测试全部布线,由于测试时产生了大量静电,导致商品飞控板被击穿。怎么办?一次偶然的机会,我发现只要在无人机地面站CLI命令行中输入“resource”后按下回车键,就能调出主控芯片的引脚定义。我欣喜若狂,立即设计出第一版电路图,随后,我按照设计的电路图画出了第一版飞控电路板,将其命名为JINHERC,并交由嘉立创公司代加工。
与成品飞控板不同的是,此飞控板采用外置供电方案,将一体成型的电源模块整体粘贴在飞控板下方。这样,供电电流和易受干扰的电信号分别设计在两块电路板上,大大减少了对控制信号的干扰,能获得更好的控制效果。
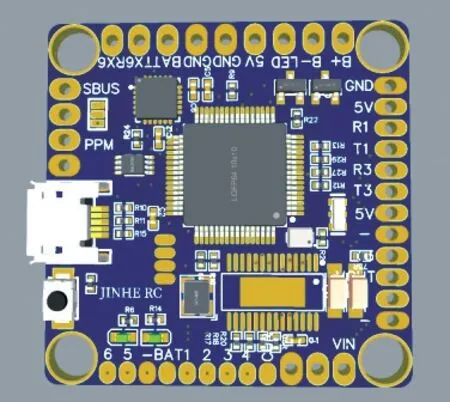
图1 第一版电路3D图
二、测试第一版飞控板
收到电路板样品和网购的元器件后,我立即焊接制作。为了避免浪费,第一次我只焊接了主控部分。
焊接完成后,我用ST-link方式烧录程序,将飞控板与地面站软件连接。此时出现了两个问题:一是USB显示未被识别,二是供电指示灯不亮。这时我才发现,虽然我考虑了外设系统的供电电路,但忘了设计USB低压供电电路,导致芯片未通电。至于USB未被识别的情况,我推测是芯片主供电缺失导致的。
为了弥补供电缺失,我使用烧录器单独给芯片供电。随着电源指示灯被点亮,芯片初始化指示灯也开始闪烁。我以为成功了,但打开地面站,依然没能连上。随后,这个飞控板项目被我暂时搁置了。
后来我和群友聊天谈到这个问题,群友的一句话提醒了我:“是不是USB硬件连接有问题?”我才意识到,之前我总是检查软件,却没有检查硬件。
随后,我想起去年修复手写板的经历:刚开始也无法识别USB,后来换了USB的两根通信线后就能正常识别了。我又分析了飞控板的现状:电脑反馈未识别,说明它能检测到有外部设备接入,只是无法识别。将两根通信线调换,不就成功了吗?
我进行了飞线处理,将信号线调换,果然,电脑没有再反馈错误,地面站也出现了检测到飞控板的串口,点击连接,成功进入了地面站,如图2。

图2 地面站端
主控与地面站建立正常通信,标志着飞控系统的研发已成功大半。这大大增强了我研究飞控板的信心,开始第一次调整电路板。
三、测试第二版飞控板
基于第一版飞控板的USB设计错误及低压供电电路的遗漏,以及在测试中发现的诸多问题,我在第一版电路板的基础上设计制作了第二版电路板。
我采用了一款高性能、外围电路较少的一款LDO为主控芯片供电,它能输出500 MA、3.3 V的稳定电流、电压,能满足主控供电需求。芯片输入最低值为4.5 V,适合作为USB电压的降压稳压器。完善电源的同时,我把USB的信号线也进行了调换。
收到嘉立创公司代加工的第二版电路板后,我又开始了飞控板的验证。这一次,我把OSD字符叠加芯片和陀螺仪都焊接上,测试这些附件能否正常工作。
此款飞控板我采用了两颗钽电容,此电容能更好地对图像进行滤波,图传效果更好。首先连接地面站,识别成功。陀螺仪正常,加速度计正常,检查无报错后,我将飞控板装入无人机进行测试。

图3 第二版飞控板性能良好
四、测试过程
首先测试动力系统,先打开地面站的设置,将电调协议改为dshot600,再打开电机测试栏进行测试(提示:调试时一定要卸桨后再调试参数),其次是测试通信系统,最后是测试图像回传和OSD字符叠加效果。总体测试效果不错。

图4 三项测试效果良好
五、户外飞行测试
我在户外进行飞行测试的结果表明这套PID参数非常适合这款飞行器。测试完悬停后,我还测试了第一人称飞行舒适度,回传稳定程度明显优于商品飞控板。
六、总结与改进方案
总体而言,这款飞控板的研制比较顺利,效果超出了预期,但仍存在以下不足。
1.设计时没有考虑成本,陀螺仪芯片选用了价格高昂的MPU6000。这款芯片价格是其他同等水平陀螺仪芯片的15~20倍。下一步可以尝试用其他ISP通信的陀螺仪芯片替代,或占用I2C串口尝试用MPU6050陀螺仪芯片替代。
2.这款飞控板在电源方面不够完善,下一步我将加入9 V稳压电源,让飞控板能支持DJI等数字高清图传。
3.此款主控板难以实现廉价的初衷,所以接下来我会尝试用STM32F411CEU6芯片尝试替代。
在下一款飞控板设计中,我会将气压计、磁力计(罗盘)、加速度计、陀螺仪结合,刷写INAV固件,实现定点、定高、稳定悬停、自动返航、自动降落等功能,提高控制的精度。
希望越来越多的人能了解航模,爱上航模,体验航模的乐趣。

图5 户外飞行测试