基于模型尺度调整算法的水下冲刷数据处理
2022-05-16程武伟樊剑甲
吕 骥,程武伟,樊剑甲
(浙江华东测绘与工程安全技术有限公司,浙江 杭州 310014)
多波束测深系统是一种全覆盖式声呐测深系统,能够精确、快速地测出沿航线一定宽度内的水下目标的大小、形状和高低变化,从而描绘出水下地形地貌的精细特征[1]。在水利水电和新能源勘测工程中,多波束探测已成为一种成熟、有效的技术手段,它对上游库区水下地形的扫测成果可用于水库库容复核、坝前淤积和冲刷监测、上游边坡滑坡体监测等;对坝后消力池过流面和下游河床的水下地形扫测成果可用于消力池(含底板、尾坎、导墙和围堰等)的冲蚀缺陷检测和下游临近河床冲坑检测[2-4]
处理多波束数据的流程:①对多波束数据进行去噪处理,即对每条测线数据逐段进行人工编辑,去除粗差;②采用专用软件整合定位数据,形成水下地形高程数据;③通过GIS软件合成基于数字高程模型(DEM)的水下地形图用于展示和提取特征参数[5]。理论上,多波束测量数据具有多源性的误差,这是由于多波束探测系统包含了导航定位传感器、姿态传感器、声速传感器和声呐传感器等多源传感器。除了传感器数据误差导致的多波束数字高程模型精度偏差,在数字高程模型中提取特征参数时,还存在多波束数据显示隐藏问题。这是由于采用软件对多波束数字高程模型制图过程时,面对区域周边数据相对中心区域多1~2个数量级及以上的地形深度变化差异,可能出现中心区域内小尺度数值变化的缺陷异常被周边大深度变化数据掩盖的情况,如果用单一模型尺度展示数字高程模型,会导致该特征区域数据被显示隐藏,从而导致数据分析出现误判断。
本文针对此类多波束数据显示隐藏的问题,阐述一种利用区块坐标、区域隔离和数据色谱法的模型尺度调整算法,以期能有效解决多波束数据显示隐藏的问题。
1 理论基础
多波束测深系统,简称多波束,是通过声波发射与接收换能器阵进行声波广角度定向发射和接收,在与航向垂直的垂面内形成条幅式高密度水深数据,可精确、快速地测绘沿航线一定宽度条带内水下地形,根据水下地形变化判别分析冲刷、冲蚀、变形、淤积等各种缺陷情况。
1.1 数据建模
多波束测量原理是根据一系列已知角度测量声波的来回时间差,算出每个角度对应的斜距,再根据这个斜距和每个波束的固定角度计算该点的水深[6],通过多波束探头沿着测线不间断地发射和接收声呐回波信号,获得不同点的水深值,形成海量的水深数据。一般多波束后处理软件为了构建高质量格网数字水深模型,多采用局部插值方法[7-8];此类插值方法一般指采用自然邻点插值(natural neighbour interpolation,NNI)的传统NNI算法和基于局部动态最优的NNI算法等[9]。
基于此类算法进行空间索引数据建模时,多波束测深数据可处理为有限离散点集S,然后对后者进行格网化组织,此时需要确定索引格网的行宽(Rspace)与列宽(Cspace),然后对每一个离散点,按照其空间位置的分布,计算其空间索引坐标[9]。对于任意离散点Pi(X,Y,Z)∈S,其空间索引坐标值的计算公式为
(1)
式中:i、j分别为空间索引块的行列号;Xmin、Ymin分别为有限离散集S在水平和垂直方向上的最小值[10]。
在空间索引数据建模的过程中,式(1)中涉及的索引格网行宽(Rspace)与列宽(Cspace)采用的是经验参数,对不同离散点集数据量存在自适应估计而导致数据失真的问题[11-12]。通过相关软件获取的色谱图和水下地形图可用于分析水下冲刷、淘蚀情况,由于在冲刷和淘蚀区域局部形成急剧变化的水深值,在局部形成不同的离散点集数据量。这可导致式(1)中的索引格网行宽与列宽的参数值出现自适应估计的问题。尤其是处理某些特定冲坑区域的多波束数据时,例如坝后消力池底板冲槽和海上风电桩基础冲坑周边,其冲刷变化量对比周边地形深度值变化可能有1~2个数量级差异,可出现特征参数数据被显示隐藏的现象,导致数据处理不完整,数据分析出现误判断。
1.2 数据处理算法
本文引入一种“模型尺度调整算法”,对多波束数据获取的水下冲刷缺陷实施快速分类和识别。“模型尺度调整算法”是一种利用区块坐标、区域隔离和数据色谱法对多波束数字高程模型的模型尺度进行自我调整适应的算法;基于该算法的数据挖掘方法能有效解决多波束数据显示隐藏的问题。此类数据挖掘方法既可用于坝后消力池冲刷等特定区域的多波束数据处理,也可用于海上风电场数量众多的桩基础周边小面积区域内的冲刷监测。
1.2.1区域隔离法
所谓区域隔离,就是将重点关注的水下地形区域进行单独提取,并与周边地形数据隔离,从而保证数字高程模型的尺度满足水下冲刷检测区域的显示精度要求。本文提出2种区域隔离方法,第一类为基于算法程序的自动区域隔离法,第二类为半人工的区域隔离法。
1.2.1.1基于算法程序的自动区域隔离法
该类方法根据已知中心坐标值和区域半径,采用风机冲刷算法程序自动提取经过潮位改正和去噪点处理的多波束特定格式数据,即带有高程值的三维点数据。这类方法能高效处理海上风电场桩基础周边冲刷数据。
首先,每个海上风电场拥有风机数量少则几十个,多则上百个;而且桩基础类型也有单桩、高桩承台、复合筒和升压站等多种。其次,每种桩基类型的基础周边冲刷检查范围是固定的,例如单桩基础为距中心坐标点17~50 m,高桩承台基础为20~50 m,复合筒基础为36~100 m,升压站是40~100 m。所以采用这种算法程序可避免大量重复的人工计算工作量,并减少人为错误。
具体的做法是先将风电场内各风机桩基础中心坐标点数据提取并建立定位表格文件,然后将多波束特定格式数据和定位表格文件代入风机冲刷算法程序中。采用专用的数据分析软件,对数据进行区间分布统计,合理范围筛选、数值计算,对不同半径范围内的高程情况、冲淤方量、数值演变等情况进行运算和统计。
1.2.1.2半人工的区域隔离法
对水电站和内陆河道的水下地形区域进行多波束检测作业,由于区域内无中心点坐标,只能从岸边控制点坐标系引点,获得区块坐标。在水电站作业区,坝前上游库区属于上游区块坐标,坝后下游过流面和河床属于下游区块坐标。针对坝后消力池区域的多波束数据处理,考虑各电站区块具体尺寸参数不同,采取人工从下游区块坐标内定位消力池的边界区域效率最高,因而定义为半人工的区域隔离法。
处理这种类型的多波束数据,半人工的区域隔离方法可以精确定位区块坐标内的目标区域,并减少算法程序中烦琐的获取并输入区块尺寸参数,反而能提高多波束数据处理工作效率。
1.2.2数据色谱法
根据多波束数据的高程值和平面坐标,可以建立基于高程值的三维数据色谱图。在完成区域隔离后,通过人工调整所选数据的高程范围,或在批处理程序中提前设定高程范围。这种调整数据色谱对应的高程值,进而调整数字高程模型尺度的方法,能够获取三维数据色谱图上不同精度的冲蚀范围和深度,从而解决多波束数据隐藏问题。
1.2.3挖掘方法流程
基于模型尺度调整算法的第二类数据挖掘方法,采用半人工的区域隔离法和数据色谱法等计算手段,适合水电站作业区域的多波束数据处理应用案例。相应的数据处理步骤归纳如下:①由于坝前和坝后的水位高程相差很大,多波束数据可分为坝前部分的多波束水下地形成果和坝后的多波束水下地形成果。②坝后的多波束数据在CARIS处理软件中以“.grd”文件格式输出,保存后的文件导入GIS制图软件,例如Global Mapper软件中,也可导入Autodesk Recap软件中。③在相关软件中,根据消力池底板流向剖面图显示的高程范围,人工调整数字高程模型的高程范围,并逐步调整高程范围的最大和最小值,使之满足消力池冲刷区域的显示要求。
2 典型案例验证
某水电站为混凝土重力坝,溢流坝采用戽流式消能工,一期、二期溢流坝采用同一形式的消力池,护坦顶部顶高程64.5 m,池底平段长22 m,全长29 m,下游河床有浅滩和碎石出露。水下检查内容包括坝后消力池底板和尾坎的缺陷区域和水下障碍物,以及临近下游河床的冲刷坑情况。坝后部分的水下地形扫测成果是通过无人船搭载多波束检测获得(图1),左岸1号和2号弧门后消力池底板局部的水流向剖面见图2。通过水下机器人搭载图像声呐和高清摄像对消力池底板进行“己”字形水下巡检,获取在2号消力池底板的冲刷区域,如图3所示。多波束数据常规处理后获得的水下地形成果无法核实水下摄像和图像声呐显示的冲蚀缺陷。

图1 坝后水下地形等高线

图2 坝后消力池底板顺水流向剖面

图3 坝后2号消力池底板水下摄像和声呐图像显示冲刷区域
由图2可知,1号和2号消力池底板的高程范围为64.5~64.7 m,落差约0.2 m;而临近河床有一个冲刷坑,最深在57 m,与周边河床的落差约7 m。由于2个落差有1个数量级的差距,导致水下地形图出现无法核实1号和2号消力池底板冲蚀缺陷的现象,定义为“多波束数据隐藏问题”。
本案例中,由于出现多波束数据隐藏问题,不能在水下地形图中直观分析消力池底板冲蚀情况,造成与前期潜水员探摸到底部冲蚀的成果不一致,后期需要采用水下机器人对消力池底部全部区域进行水下巡检,先检测出消力池冲蚀区域的范围和深度,再进行多波束数据的二次处理验证。案例说明,如果能预先了解多波束数据隐藏问题的形成条件,并能合理应对处理,可有效降低水下作业时间和项目作业成本。
2.1 坝后消力池冲刷检测
对多波束采集的消力池底板数据的第一次处理中含有多波束数据隐藏问题,如图4所示,导致消力池底板冲蚀0.5 m内的高差没有显示出来。有的案例在分析中指明了存在0.2 m的高差,但在三维图像中没有明确标识出来[13]。
采用模型尺度调整算法后,通过运用区域隔离法和数据色谱法,把多波束数据隐藏问题暴露出来。本案例对坝后消力池底板冲蚀低于0.2 m高差的位置和范围就有明确标识,也能和前期潜水员探摸摄像的成果吻合。多波束数据调整后效果见图5。
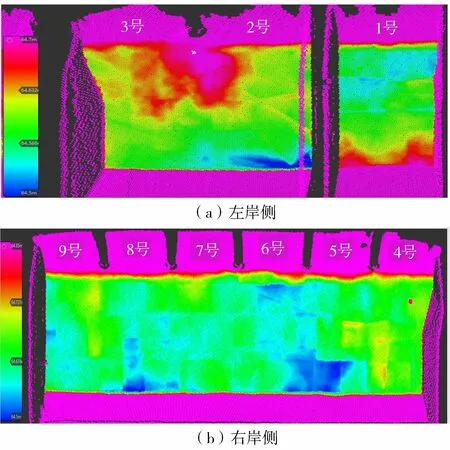
图5 坝后消力池底板冲蚀多波束处理效果
2.2 坝前铺盖表面变形检测
采用多波束技术也可对面板堆石坝的结构表面变形情况进行检测[14-16]。某水电站大坝上游面的水下铺盖平台安排实施水下结构变形检测,并找出疑似渗漏位置。通过无人船搭载多波束,获取坝前铺盖平台高精度水下地形数据,其中第一次的处理效果没有运用区域隔离和数据色谱法,无法明确平台结构表面变形情况,如图6所示。
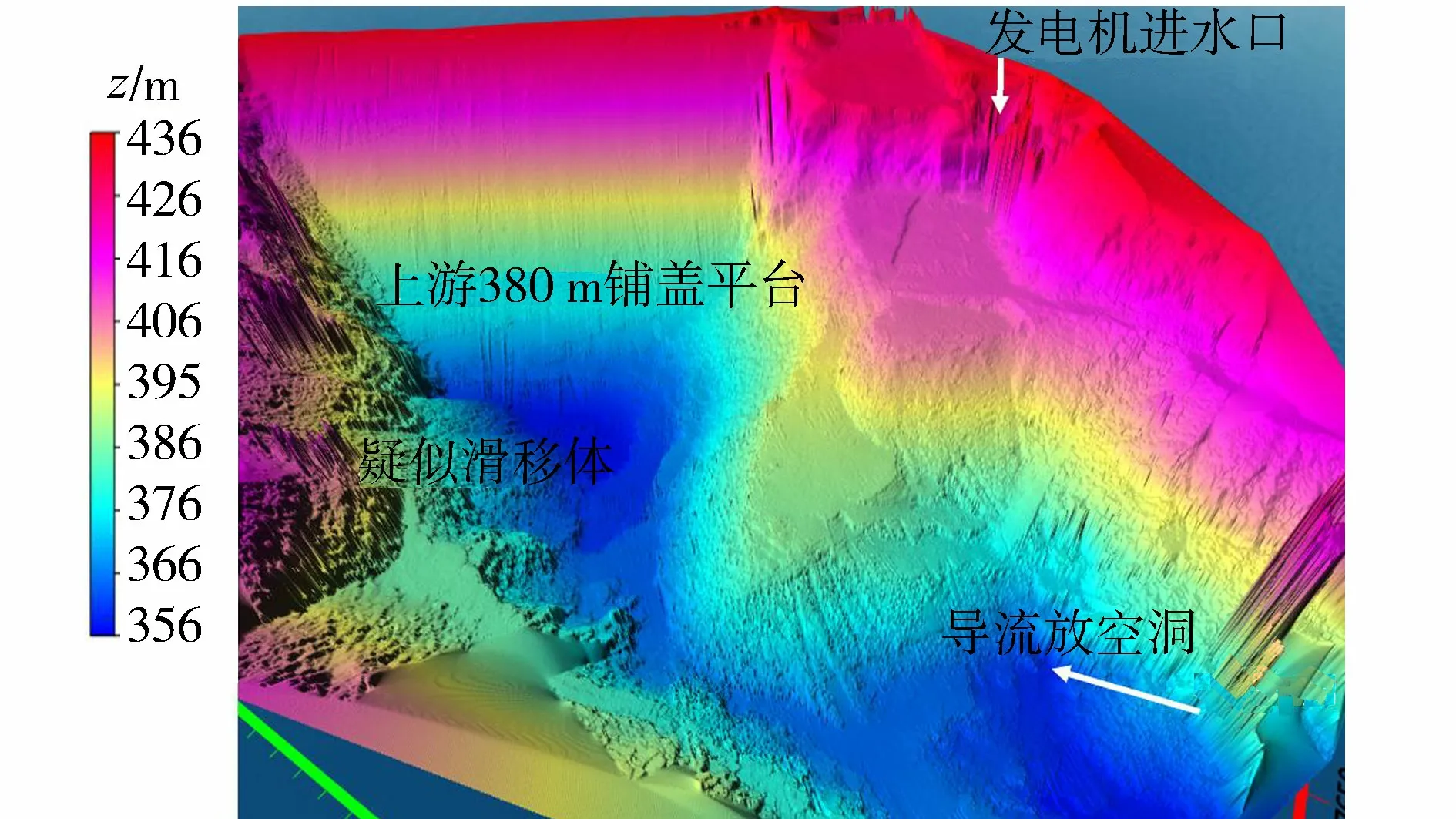
图6 坝前380铺盖平台第一次多波束处理效果
采用模型尺度调整算法后,在坝前铺盖平台数据处理中的多波束数据隐藏问题暴露出来,通过运用区域隔离法和数据色谱法,获得了铺盖平台在377~380 m高差范围内的变形塌陷区域,对后续进行疑似渗漏位置的分析提供了数据支撑,如图7所示。
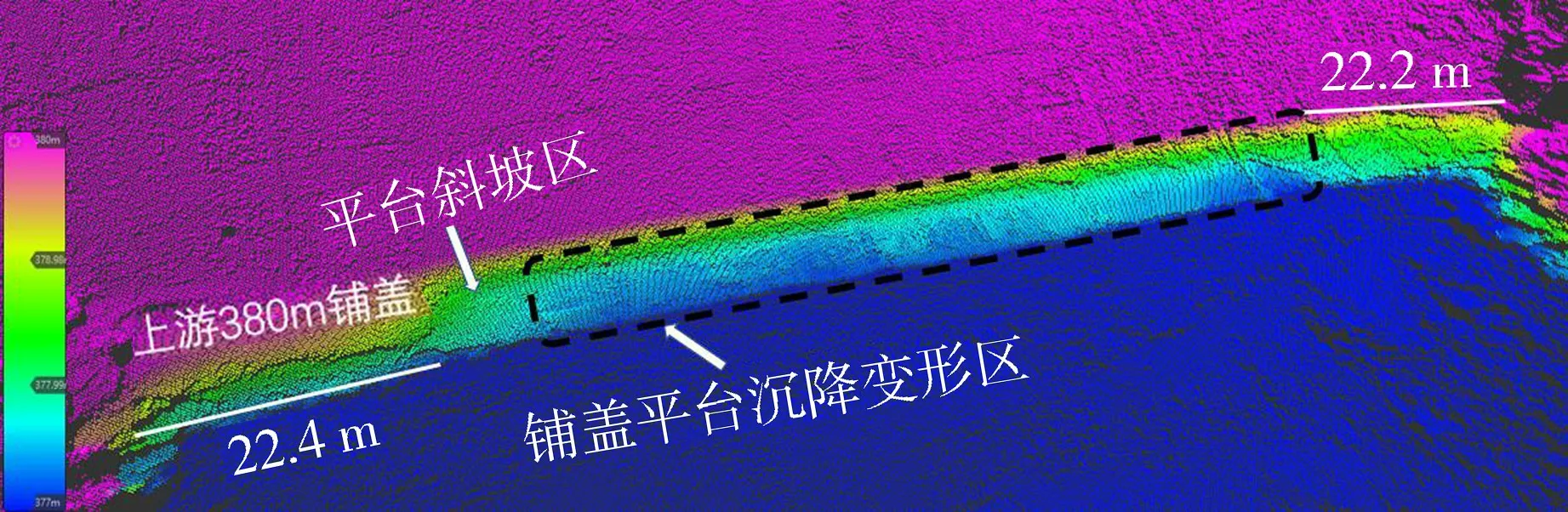
图7 坝前铺盖平台第二次多波束处理效果
2.3 应用效果分析
基于模型尺度调整算法的第二类数据挖掘方法,适合坝后消力池等需要对数字高程模型处理采用人工调整处理方案的应用案例。类似坝后消力池检测区域的选取适合采用半人工区域隔离法,精确调整数字高程模型中的显示色谱,完成对模型尺度的调整处理,从而解决形状不规则区域或特定冲刷区域的多波束数据显示隐藏问题。
在坝后消力池冲刷检测中,检测区域的高差范围为0.2 m,对应处理前的最小高差1 m,处理的对比效果为1∶5。在坝前案例中,检测区域的高差范围为3 m,对应处理前的最小高差10 m,处理的对比效果为1∶3.33。可见,采用本文提到的模型尺度调整算法,可对多波束数据处理成果提高3~5倍的显示效果,并解决多波束数据隐藏的问题。
3 结 语
通过分析消力池过流面检测的多波束数据处理过程中的数字地形特征的显示隐藏现象,提出了两类基于模型尺度调整算法的数据挖掘方法,其中第二类数据挖掘方法已应用于水电站水工建筑物水下冲刷检测的多波束数据处理中。其中的模型尺度调整算法是一种利用区块坐标、区域隔离和数据色谱法的数据处理方法,可对多波束数据处理成果提高3~5倍的显示效果,并解决多波束数据隐藏的问题。
