通用航空无人机飞行管控系统设计
2022-05-16王梦璇
■ 王梦璇
引言
本文旨在结合中国民航最新政策法规,设计一种无人机飞行管控系统“G-Cloud”,可以直接对无人机的位置、高度、速度等数据进行实时监测;利用互联网和云技术的手段,将海量的文字及数据信息通过系统终端直观呈现。系统使用雷达实现对活动目标自动跟踪监测、并结合视频监控实现安防系统的数字化、智能化和网络化。系统主要功能包括:单个或多个目标自动探测、跟踪运动目标、区域报警设置、智能自动值班、目标轨迹、信息回放、目标自动识别等。
1 系统总体结构
如下图所示,G-Cloud 由机载数据采集设备、低空监测设备、监控中心、工作终端四大部分组成:
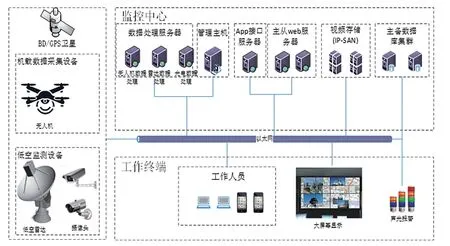
图1 系统网络结构拓扑图
1.1 机载数据采集设备
机载数据采集设备含定位模块、无线通讯模块及ADS-B 模块。无人机飞行过程中,定位模块会按一定频率接收定位卫星下发的最新位置信息,然后机载盒体会通过无线通讯及ADS-B 两种方式实时向监控平台实时提交最新位置信息。
1.2 低空监测设备
低空监测设备包括安装在监控现场的低空监控雷达和监控摄像机。
低空监控雷达:雷达对探测区域内的无人机等活动目标进行搜索、获取目标的位置,方向,速度等信息,并定时上报给雷达数据处理服务器。
监控摄像机:安装在现场的智能网络摄像机,监控中心能够根据雷达探测追踪目标控制摄像头旋转角度,对目标进行摄像;并将目标的视频数据传送给光电数据处理服务器。
1.3 监控平台
监控中心由管理主机、机载数据处理服务器、雷达数据处理服务器、光电数据处理服务器、Web 服务器、APP 接口服务器、视频存储设备、数据库服务器组成,是整个系统的核心部分。监控中心采集雷达定时发送的目标监测数据、根据目标的经纬度,方向,速度,将活动目标的运动轨迹在地图上显示,并控制摄像机的旋转,对报警目标进行拍摄,同时进行大屏幕播放。监控中心将雷达数据实时存入数据库,将视频文件存入视频存储设备。监控中心为安保人员提供web、手机APP、现场大屏幕等展示接口。
机载数据处理服务器:负责采集无人机定时上报的经纬度、高程、时间等数据,同时将这些数据存入数据库。
雷达数据处理服务器:负责采集雷达定时发送的目标监测数据、雷达数据包括目标x 坐标、目标y 坐标、目标z坐标、目标方位角、目标绝对速度、目标距离、目标批号、数据周期等,同时将雷达数据存入数据库。
光电数据处理服务器:负责控制摄像机,对报警目标进行摄像,并接收摄像机实时传送的视频数据,传送到大屏幕播放,同时将视频文件存入视频存储设备。
Web 服务器:Web 服务器负责整个监控平台系统的功能及数据展示,是整个平台的展示窗口。
APP 接口服务器:APP 接口服务器将现场报警信息推送到安保人员的手机APP 上,安保人员可以通过手机APP 查看现场报警信息。
视频存储设备:存储摄像机拍摄的视频文件。目前视频存储有三种成熟的解决方案:存储服务器方案、IP-SAN方案、云存储方案。存储服务器方案扩展比较困难,云存储方案成本比较高,本系统采用IPSAN 方案,IP-SAN 方案具体介绍见数据存储方案设计章节。
数据库服务器:数据库服务器为数据采集、处理服务器提供共享存储空间和内容一致性的存储区域,存储大量雷达监测数据以及管理设置数据。数据库服务器采用主从同步,读写分离方式存储数据。
管理主机:监控整个系统服务器运行状态以及网络性能。
1.4 工作终端
工作终端包括安保人员使用的电脑和手机、大屏幕显示终端、声光报警终端。工作人员可以通过前端电脑浏览器登录,管理整个系统,实时了解到现场监控情况;报警信息也会实时推送到工作人员手机上;另外大屏幕实时播放监控现场视频。
2 系统分层结构
G-Cloud 平台软件结构从逻辑上分为物理层、网络层、数据采集层、应用支撑层、系统应用层、信息展示层等六层。该系统采用组件式结构,灵活方便,并有良好的通用性和可扩展性。基于该模型可迅速组建各种应用模式的无人机监管解决方案。系统的分层结构如下图所示:
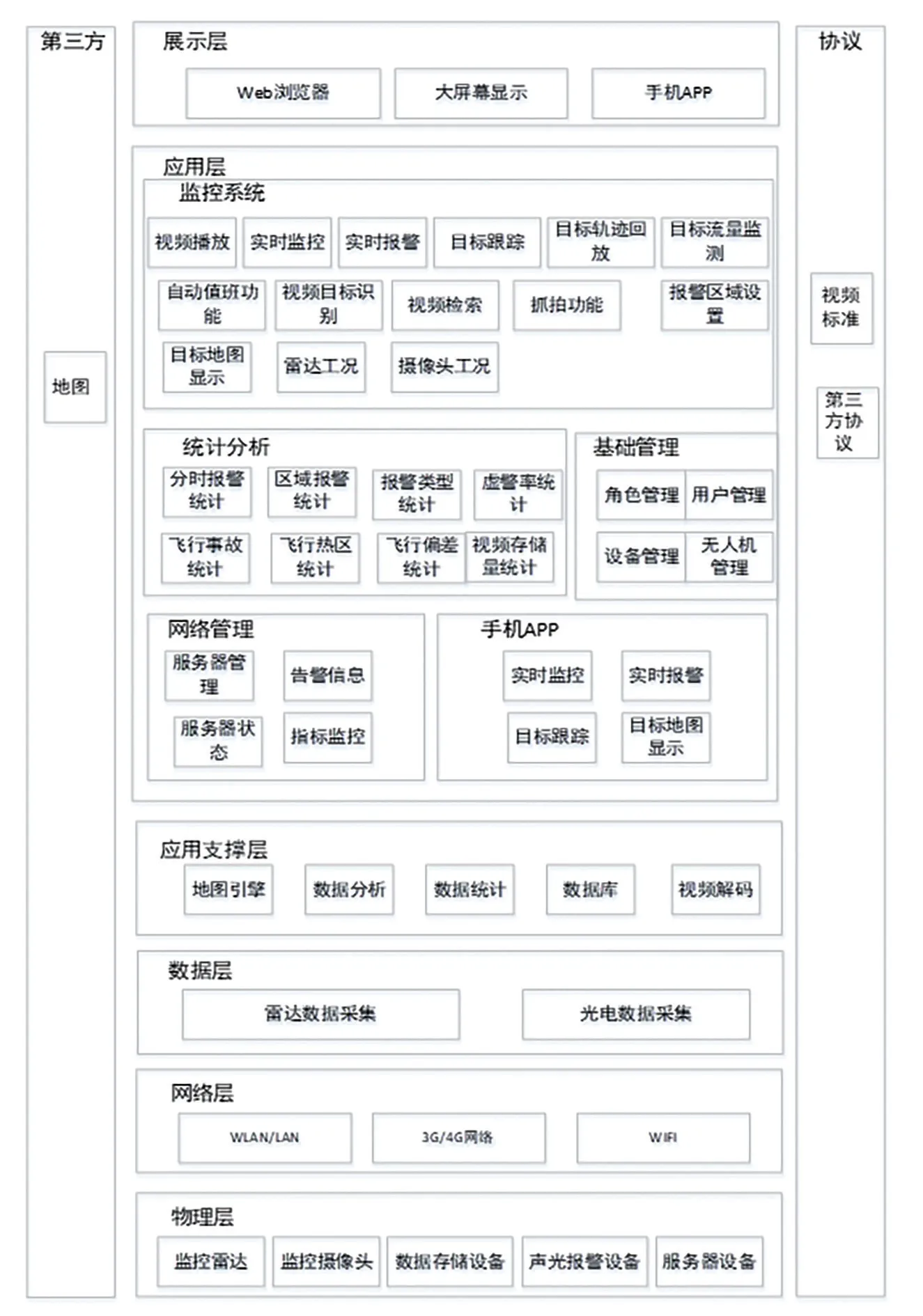
图2 分层结构图
2.1 物理层
物理层包括监控雷达、监控智能网络摄像机、数据存储设备、声光报警设备以及服务器等物理硬件设备,是整个系统的硬件基础。
2.2 网络层
网络层包括WLAN/LAN、3G/4G/5G网络、WIFI 等通信方式,监控雷达、监控摄像机与监控中心之间的数据通过WLAN/LAN 通信,监控中心与安保人员手机APP 通过3G/4G/5G 网络通信。
2.3 数据层
数据层包括雷达数据采集、光电数据采集等。数据层为应用支撑层提供数据基础。
2.4 应用支撑层
应用支撑层包括地图引擎、数据处理、数据分析、视频解码、数据库等。应用支撑层主要依赖地图、活动目标的参数,预测目标运行轨迹,为应用层提供功能基础。
2.5 应用层
应用层包括、实时监控、实时报警、目标跟踪、目标轨迹回放、目标流量监测、自动值班功能、视频目标识别、抓拍功能、报警区域设置、目标地图显示、视频播放、日志管理、用户管理、历史报警、摄像头运转情况、雷达运转状况、轨迹回放、角色管理、设备管理、分时报警统计、区域报警统计、目标类型统计、目标趋势统计等功能,具体可见下一节系统功能。
2.6 展示层
展示层包括web 界面展示、手机APP 展示、中心大屏幕展示;监控管理人员可以通过web 界面、中心大屏幕,便捷了解监控现场的实时情况、并可以对系统进行设置。
2.7 依赖和规则
雷达和光电的综合安防系统依赖现场地图,并遵守视频标准、以及第三方协议等。
3 系统工作流程
3.1 机载数据采集设备工作流程
机载数据采集设备工作流程流程主要包含机载数据接收及处理流程、视频数据处理流程、以及监控流程等。系统流程图如下图所示:
3.2 机载数据处理流程
飞行中的无人机实时将最新位置及飞行状态数据上报给机载数据处理服务器,机载数据处理服务器分析处理数据,并将数据存储在数据库服务器;过程中如果需要报警,机载数据处理服务器将通过光电数据处理服务器发送指令给摄像机,打开摄像机对目标进行摄像,同时发送报警信息给声光报警设备和APP服务器,APP 服务器将报警信息推送到安保人员手机上。
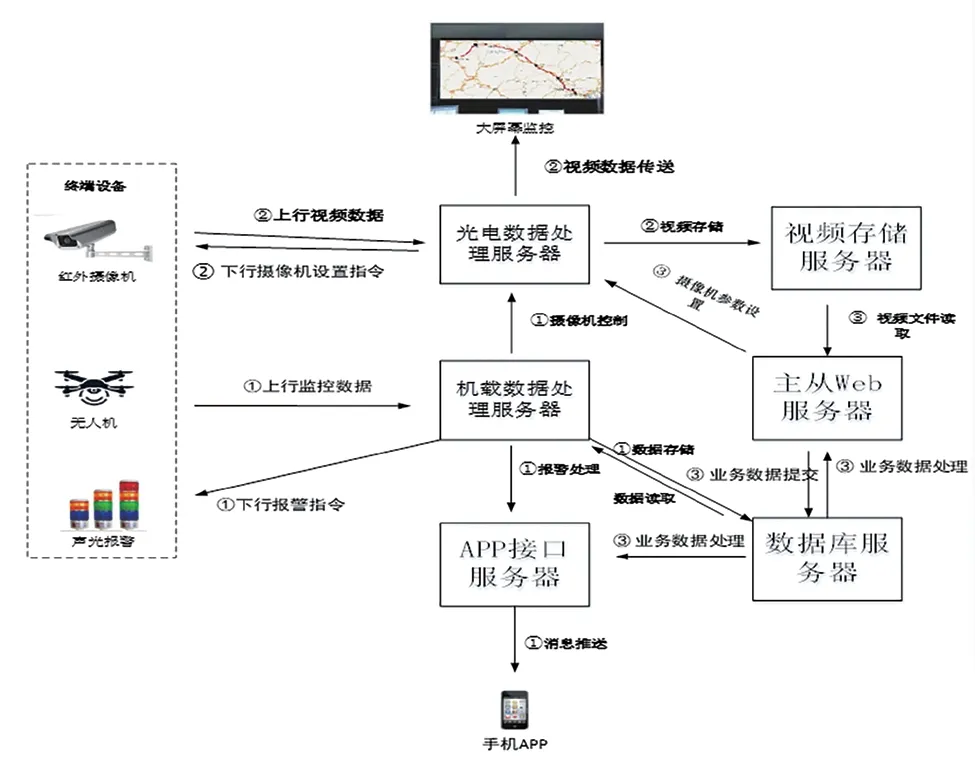
图3 系统流程图
3.3 视频数据处理流程
摄像机将现场视频上传给光电数据处理服务器,光电数据处理服务器将视频发送给现场大屏幕,同时保存到视频存储设备上;安保人员可以通过光电数据处理服务器将摄像机设置参数发送给摄像机。
3.4 监控流程
安保人员通过监控前台查看监控现场状况,安保人员也可以通过监控前台界面向摄像机发出设置指令,指令通过光电数据处理服务器传送给摄像机。
3.5 地面雷达及光电工作流程
主要包含雷达数据处理流程、视频数据处理流程、以及监控流程等。系统流程图如下图所示:
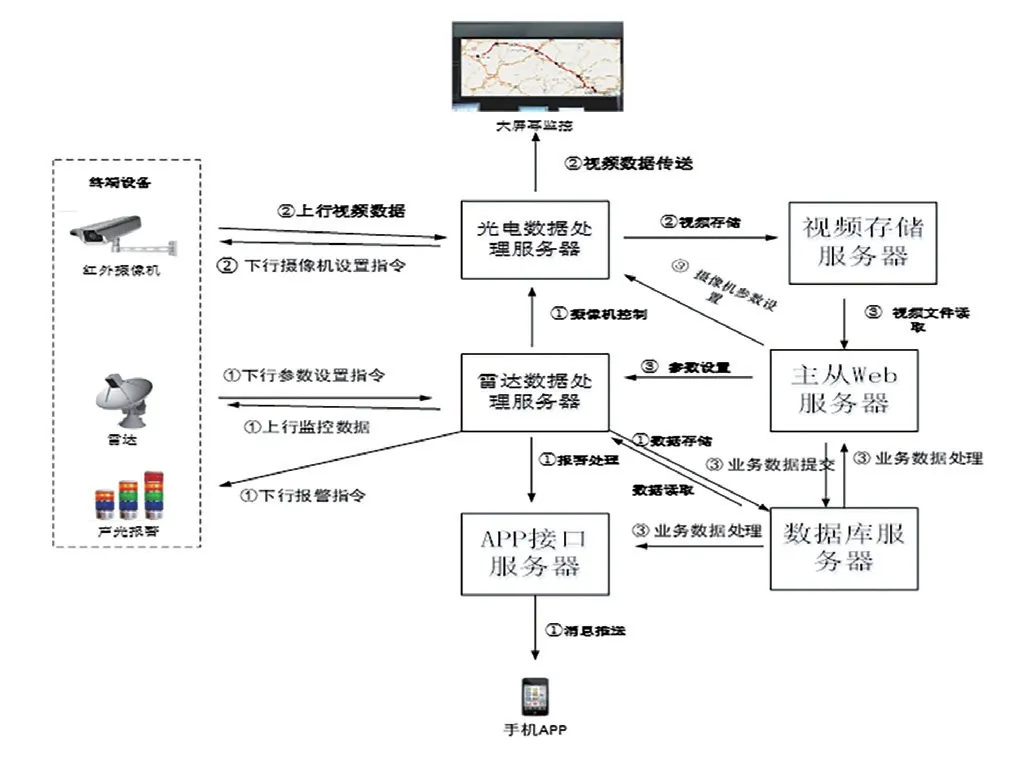
图4 系统流程图
3.6 监控雷达数据处理流程
安装在现场的监控雷达实时将活动目标数据上报给雷达数据处理服务器,雷达数据处理服务器分析处理数据,并将数据存储在数据库服务器;如果发现报警目标,雷达数据处理服务器将通过光电数据处理服务器发送指令给摄像机,打开摄像机对目标进行摄像,同时发送报警信息给声光报警设备和APP 服务器,APP 服务器将报警信息推送到安保人员手机上。
3.7 视频数据处理流程
摄像机将现场视频上传给光电数据处理服务器,光电数据处理服务器将视频发送给现场大屏幕,同时保存到视频存储设备上;安保人员可以通过光电数据处理服务器将摄像机设置参数发送给摄像机。
3.8 监控流程
安保人员通过监控前台查看监控现场状况,安保人员也可以通过监控前台界面向雷达和摄像机发出设置指令,指令通过雷达数据处理服务器、光电数据处理服务器传送给监控雷达或者摄像机。
4 总结
G-Cloud 能够实现无论在办公室还是室外,随时通过电脑、手机端管理和监视各类型无人机;有效提升监管部门协同效率及管理能力,飞行计划快速报批,让用户赢得起飞时间;支持互联网/3G/4G/5G/ADS-B 北斗低空雷达等多种链路数据实时接入,结合禁飞区数据和电子围栏,无人机飞行过程实时监视,自动告警。