智能输液架的研究与设计
2022-05-14陈逸涵杨尚昀冯宇航王思超
陈逸涵 杨尚昀 冯宇航 王思超

摘要:针对病人输液时移动难的问题,提出了一款集移动,避障,自动跟随病人功能为一体的智能输液架。该智能输液架以STM32和树莓派为核心,以驱动模块,视觉模块,避障模块为基础构成自动跟随系统,上位机树莓派通过yolo算法分析病人与输液架的相对位置关系,下位机STM32控制移动速度和方向,做到输液架自动跟随病人并保持距离恒定,实现智慧医疗。
关键词:自动跟随;STM32;树莓派;yolo算法;智慧医疗
目前现有的输液架大都是固定的无法移动的,少部分考虑到病人移动难问题的输液架也只是简单的加上轮子或通过电机助力,并没有从根本上解决病人移动的问题,还会造成鼓针等问题。我们设计的智能输液架利用MOSSE算法和底盘技术识别自动跟随病人,保证了病人在输液的过程中的移动。
一、系统硬件设计
(一)主控芯片
本设计的智能输液架的主控芯片选取意法半导体公司生产的基于ARM Cortex-M3 内核的32位的STM32F103C8T6微控制器,程序存储器容量是64KB,具有性能高,功耗低,集成度大的特点。
(二)底盘模块
移动模块主要使用三轮全向轮底盘,三轮配置的承载能力和稳定性都要优于四轮配置的底盘,全向轮具有较好的承重能力,并且能够在室内空间里发挥最大的转弯能力,适合于室内的移动。三轮全向轮移动平台是三轮轴线成120度角,全向轮中心分布在同一个圆上,轮子轴心指向平台中心,每个全向轮含9个小轮。
(三)自动跟随模块
自动跟随模块主要由摄像头和树莓派器件配合运动模块共同组成。由摄像头获取图像通过树莓派进行图像预处理后采用MOSSE算法跟踪目标。
(四)避障模块
避障模块采用超声波模块HC-SR04,该模块可提供2-400cm的测量范围,模块由超声波发射器、接收器与控制电路三部分组成。模块采用IO触发测距,模块自动发送8个40KHz的方波并检测是否有信号返回;有信号返回,通过I0输出高电平,高电平持续的时间就是超声波从发射到返回的时间,测试距离=(高电平时间*声速)/2。
二、系统软件设计
(一)整体功能设计
摄像头对贴有标签的跟踪目标进行图像采集,将信息传至上位机树莓派,并利用卷积神经网络进行训练,保持跟踪目标的標签始终位于摄像头采集图片的中心位置,对在目标身上的标签进行分析,不断调整智能输液架的角度,当目标标签偏图像左侧时说明输液架需要向左移动,右侧反之。若目标标签在图像中的面积变小,说明输液架远离了目标。上位机树莓派利用串口通信与下位机STM32进行数据交互,确定与输液架的相对位置来控制输液架的速度、与病人的距离以及姿态方向。在识别特定病人后,不断重复运行上述操作,以达到实时跟随的效果。
(二)底盘运动原理
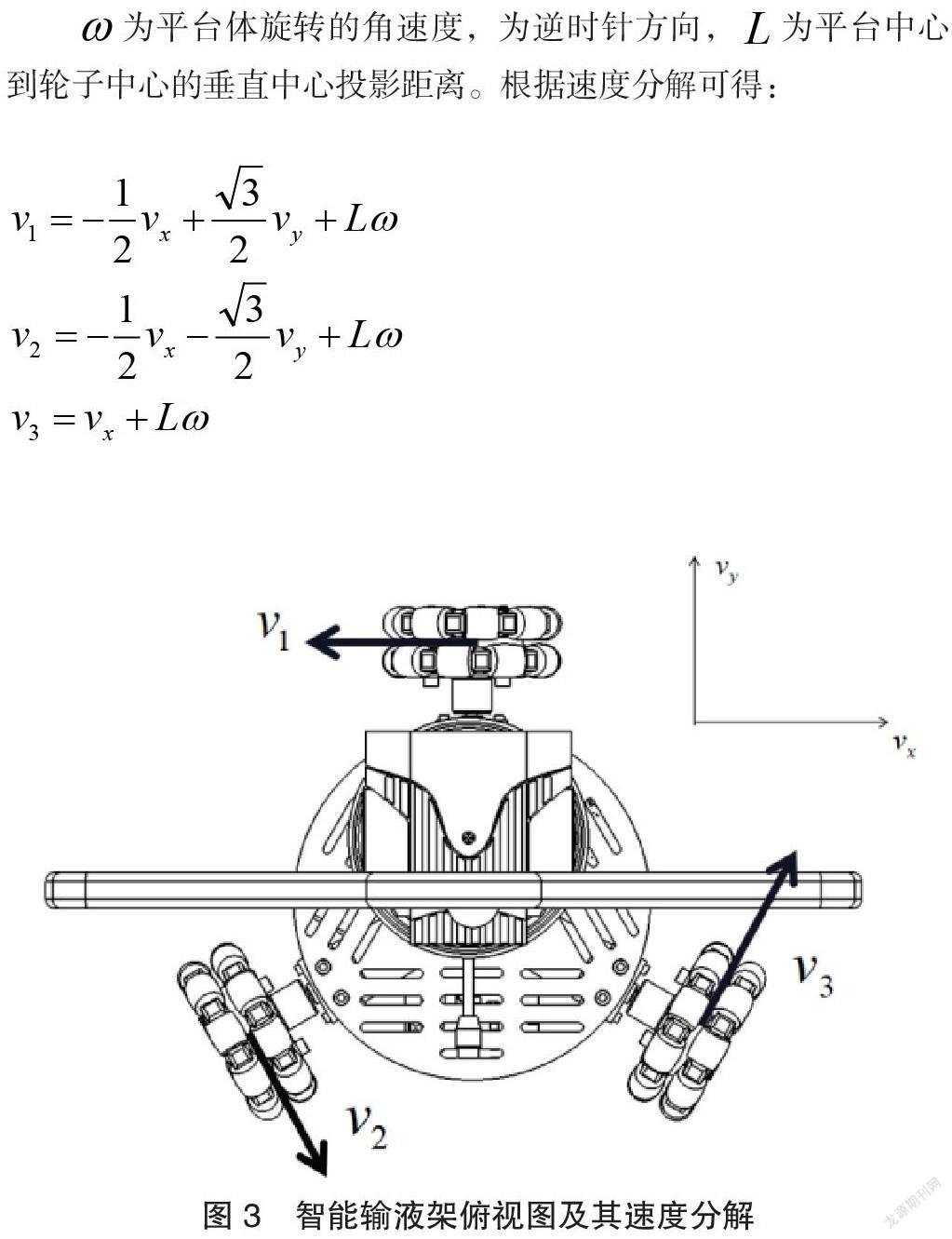
为实现三轮底盘的运动控制,将三轮底盘中心点的位移转化为每个全向轮上各自的转动,进一步得到三轮底盘的速度和方向与三个全向轮的转速关系,整体由STM32控制三个全向轮的转速信息。
为平台体旋转的角速度,为逆时针方向,为平台中心到轮子中心的垂直中心投影距离。根据速度分解可得:
(三)跟随精度的提升与摔倒检测
为提高跟随精度并加入摔倒检测功能,使用openpose对跟随目标人体进行关节点提取,由于人体摔倒,左转,右转等动作主要依赖于头部,躯干,四肢的状态,因此使用18个关节点连接起来形成人体骨架图,利用卷积神经网络进行训练,对人体姿态进行预测,预测出左,右转弯等动作以达到更高的跟随精度,并在跟踪目标摔倒时报警,获得最佳抢救时间。
(四)自动跟随算法
视觉跟踪在视频处理中应用广泛,目标被成功跟踪的每一帧都提供了目标的信息。跟踪算法比在每帧上运行一个对象检测器使用更少的计算资源,因此采用基于相关滤波的跟踪算法。目标的初始选择是基于第一帧中以目标为中心的小跟踪窗口。从此点开始,跟踪和过滤训练同时开始。通过在下一帧的搜索窗口中关联过滤器来跟踪目标,不断在线更新。由于基于深度学习的跟随算法训练周期长,启动慢,实时性不强。因此选择了基于相关滤波的MOSSE算法,实时性更好,启动快,部署方便。MOSSE算法可概括为以下三步:
(a)输入图像f,理想输出g。变换到频域中。
(b)寻找合适的滤波器h:利用求导找到最优解。
(c)在线更新。
传统自动跟随模块利用超声波传感器,结合三边定位算法和超声波测距的原理,预测与跟随目标的相对距离,调整速度和方向信息,从而实现自动跟随。但基于超声波传感器的自动跟随模块更容易受外界障碍的干扰,跟随精度更低,如果应用于输液架的话,很容易产生鼓针,出血等危险情况,因此选择基于视觉识别的精度更高的自动跟随模块。
三、结语
本设计主要是基于STM32单片机和树莓派进行的,能够实现自动跟随输液病人,跟踪精度高,检测病人周围障碍物并发出提醒,病人摔倒及时检测发现并报警的功能,以便病人输液时的移动。且本设计识别速度较快,跟踪精度较高,具有一定的推广价值。
参考文献:
[1]刘勇,吕艳辉,白云裳.三轮全向轮机器人底盘控制与分析[J].中国新通信,2019,21(16):143.
[2]吴瑞锐,朱晓峰,宋宗峰.基于HC-SR04多超声波避障技术[J].智库时代,2020(03):281-283.
[3]简傲.三轮全向移动机器人设计与里程计校正方法研究[D].武汉科技大学,2021.
[4]刘日凤.基于行为识别的人体跌倒系统研究与实现[D].西安理工大学,2021.
[5]王毅,王恺,张艺谭,刘顿,刘妤.基于超声波传感器的智能跟随系统设计[J].传感器与微系统,2021,40(08):92-95.
[6]Fei Xia,De-Jun Jiang,Jin Xiong,Ning-Hui Sun.A Survey of Phase Change Memory Systems[J].Journal of Computer Science and Technology,2015,30(1).
项目资助:天津市级大学生创新创业训练计划项目:“智能输液架的研究与设计”(项目编号:202110058044)。
