可见光热反射成像测温中图像配准技术研究
2022-05-12翟玉卫吴爱华
翟玉卫, 刘 岩, 李 灏, 吴爱华
(中国电子科技集团公司第十三研究所,河北 石家庄 050051)
1 引 言
基于光学原理的温度检测技术已经在半导体器件温度测量领域得到了广泛应用,尤其是对于工作在大功率条件下的器件,光学温度检测技术已经处于不可或缺的地位。目前应用比较广泛的光学原理测温仪器主要有显微红外热像仪、微区拉曼测温仪及光热反射成像测温仪[1~3],这几类仪器的突出优势是非接触测温,不影响被测器件或产品工作状态,测试结果直观。其中光热反射成像测温仪具有最高250 nm的空间分辨率及20 ns的时间分辨率,不仅能够测得器件表面微小结构的温度并能获得其温度变化过程[4,5]。由于这些突出优点,光热反射成像测温仪在大功率微波功率器件温度测试方面得到了日益广泛的应用。
国内在光热反射成像测温技术研究方面报道较少,文献[6]报道了用国外生产的仪器对GaN HEMTs进行测温的应用。在理论研究方面,文献[7]报道了提高光热反射测温分辨率的研究。为了推动光热反射成像测温装置国产化进程,本文进行了更接近实用化的研究,重点分析了光热反射成像测温中图像配准技术,并初步实现了对GaN HEMTs器件的温度成像检测。
2 图像配准算法
光热反射测温技术基本原理如式(1)所示。
(1)
式中:ΔR为反射率变化量;R为反射率的均值;ΔT为被测材料温度变化量,K;CTR为热反射率校准系数,与材料相关,K-1。
有关技术文献指出,被测件与测温仪器之间发生亚像素级的相对位置变化会影响测温结果。因此,在光热反射成像测温过程中需要进行精确的图像配准[8],即采用一定的技术手段使被测件与测温仪器的相对位置保持固定不变。这是实现准确热反射测温的重要前提。
被测件与测温仪器之间的位移表现在结果上就是测温仪器前后获取的两幅图像不重合,因此实现图像配准的第一步就是计算出两幅图像相对位移,这个位移是二维的,这里把计算位移的算法称为图像配准算法,把二维方向分别称为x方向和y方向。
设参考图像各点读数为s(x,y),待配准图像g(x,y),两图像间仅存在平移变换,即g(x,y)=s(x-Δx,y-Δy),其中x,Δx,y,Δy均为整数。
空域做平移等效于与δ(x-Δx,y-Δy)做卷积,对应于频域乘一个相位:
f(x,y)⟺F(u,v)
(2)
式中:u、v是x、y傅里叶变换后对应的空间频率。
(3)
式中:M、N分别是是x、y方向像素数。
(4)
空域互相关对应于频域:
C(u,v)=S*(u,v)G(u,v)
(5)
由于:
g(x,y)=s(x-Δx,y-Δy)
=s(x,y)⊗δ(x-Δx,y-Δy)
(6)
(7)
(8)
因而互相关函数的傅里叶变化为:
(9)
进行归一化后只留下相位信息,称为phasecorelation。
(10)
逆变换得到空域的一个冲击函数。
cp(x,y)=δ(x-Δx,y-Δy)
(11)
函数峰值对应坐标即为偏移量:
(12)
用上述算法即可实现像素级的图像偏移量。但是,正如文献[8]中指出的,亚像素级的位移对光热反射成像测温仍然会有很大的影响。该方法运算量较小,在大位移和小位移条件下均可使用,只需根据现有信息反推得到sinc函数的各个参数,再由sinc函数得到(Δx,Δy)即可。为了实现亚像素级配准,将亚像素平移的cp(x,y)可以近似认为是中心在(Δx,Δy)处的sinc函数的下采样[9],因而可以根据cp(x,y)峰值点附近的函数值估计(Δx,Δy)。以仅存在亚像素平移的情况为例,假定主峰为cp(0,0),两个次峰分别为cp(1,0)和cp(0,1),则x、y方向的平移量Δx、Δy可依式(13)、式(14)计算:
(13)
(14)
其中±号取值应令估计的平移量落在主峰与次峰之间,上例情况中两个方向平移量都应在区间(0,1)内。
3 实验装置及结果分析
3.1 实验装置
完成算法编写后,需采用一定技术手段将被测件调回取参考图像的初始位置。这里采用了基于压电陶瓷的纳米位移台实现被测件位置的实时调节[10]。图1所示是搭建的实验装置。CCD相机用于获取被测件表面反射光强并成像;光源用于提供入射到被测件表面的单色光;三轴压电平台用于实时补偿X/Y/Z方向发生的微小位移;高精度控温组件用于改变或保持被测件温度;Z轴位移装置实现对被测件的快速聚焦;X、Y位移装置作为粗调装置以较快速度调节被测件水平方向的位置。
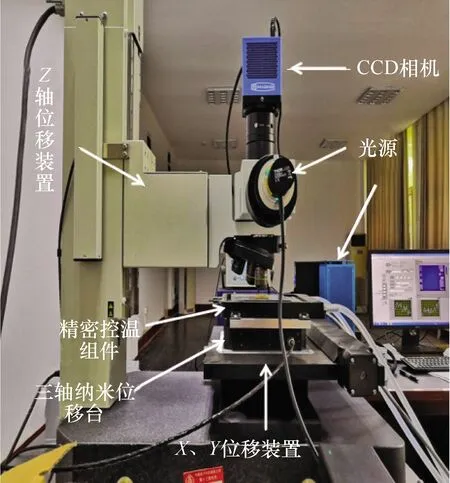
图1 光热反射成像测温实验装置
测试装置采用20×物镜,数值孔径(NA)为0.4,采用530 nm波长单色LED作为光源,根据空间分辨率斯派罗判据(Sparrow Criteria),其最佳空间分辨率如式(15),为662.5 nm。
(15)
式中:Ds为空间分辨率,m;λ为光的波长,m;NA为数值孔径,无量纲。
CCD相机作为探测器,其像素尺寸(pixel pitch)决定了成像的清晰程度,及探测器是否能够将具备了足够分辨力的图像清晰显示出来。式(16)是镜头放大倍率M、像素尺寸S、空间分辨力Ds三者之间的关系式。
(16)
实验装置采用的CCD相机像素尺寸为5 μm,则配备放大倍率为15倍物镜时即可满足需要。实验装置的20×物镜足以将662.5 nm分辨率图像清晰呈现。此时,每个像素对应被测件上0.25 μm的视野,即像素分辨率(pixel resolution)为0.25 μm。
在测量过程中,纳米位移台会根据图像配准算法给出的偏移量实时调节被测件在水平方向的位置,最终完成图像配准。这里选择德国PI公司的生产的P-562.3CD型三轴压电平台。该位移台在X、Y、Z三个方向最高行程200 μm,最小步进1 nm。调试完成后,该位移台定位稳定性约10 nm。
为了验证配准技术的精度,采用纳米位移台作为参考标准。设定纳米位移台三轴的初始位置为(100 μm,100 μm,100 μm),调整纳米位移台使被测件在X方向出现1 μm的位移,此时纳米位移台三轴坐标如图2(a)所示(只显示X、Y方向)。采用图像配准技术后,纳米位移台坐标如图2(b)所示,放大后如图2(c)。可见,配准技术可以实现精度约20 nm,远优于像素分辨率,可以实现亚像素级的图像配准。
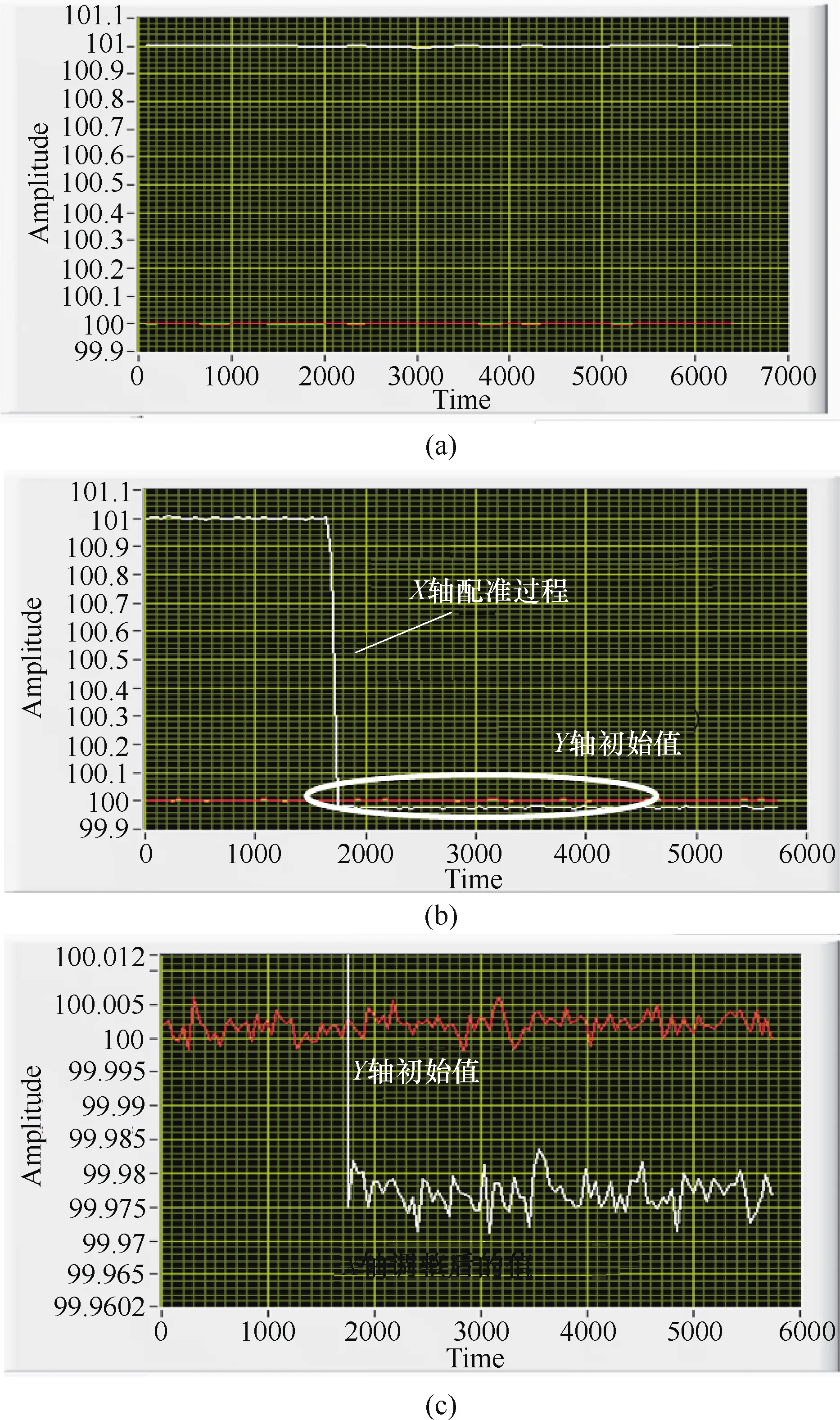
图2 图像配准技术的精度
借助于上述技术,即可实现亚像素级的图像配准技术,及图像配准算法实时计算被测件与测温仪器在水平方向的相对位移,压电平台根据这个位移量调整被测件在X/Y方向的位置,保持被测件与CCD相机的相对位置不变。图3给出图像配准方法对由于温度变化引起位移的修正结果:图3(a)为被测件20 ℃时测得的图像;图3(b)为被测件50 ℃(未进行图像配准)时测得的图像;图3(c)为被测件50 ℃时重聚焦后测得的图像;图3(d)为被测件50 ℃时进行图像配准后测得的图像。测温过程中以20 ℃作为起始温度,此时被测件的位置作为起始位置,获取CCD的图像作为参考图像;当被测件温度升高至50 ℃时,由于热膨胀,其位置必然会发生变化,而且这个变化发生在X/Y/Z三个方向,具体表现就是图像显示区域改变和图像模糊;进行图像配准前首先要调整Z轴以实现重新聚焦,然后用图像配准方法及压电平台自动将被测件的位置调整回初始位置,再进行有效测试数据的采集。

图3 被测件位移修正过程
在图像配准技术完成后,对典型GaN HEMTs器件进行了光热反射成像温度测试,如图4。根据GaN HEMTs器件工作原理[11~13],此类器件发热应集中在漏极和源极之间几个微米的栅极附近区域。
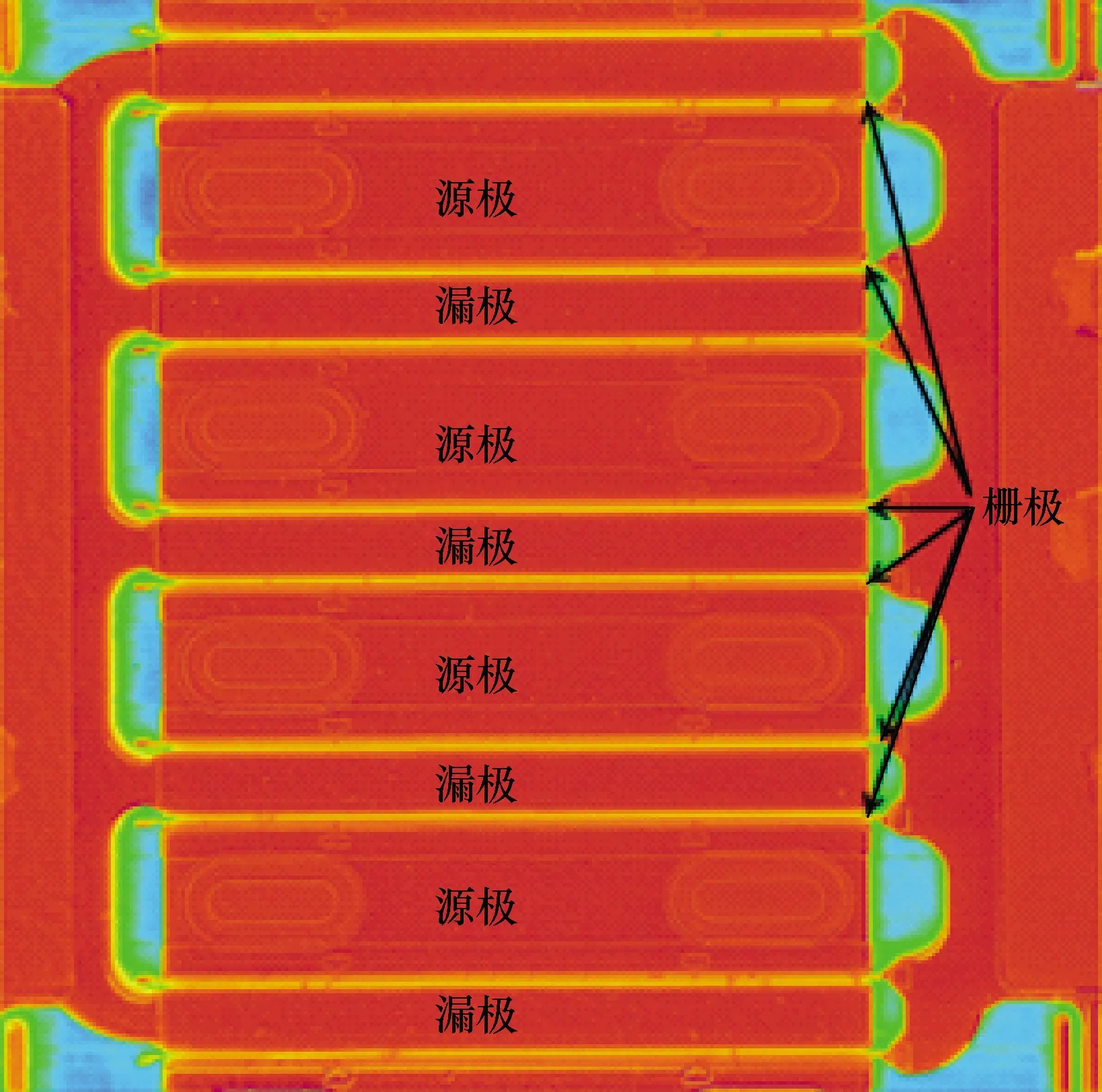
图4 被测件图像
3.2 试验结果
在Vds=28 V,Ids=0.25 A,控温组件20 ℃试验条件对被测件进行了测试,采用20×物镜,当不用配准技术时,被测件在测温过程中会发生非常明显的位置漂移,导致测温结果非常不理想,如图5所示。没有采用配准技术,被测件在测温过程中发生了明显的位置漂移,测温过程中测温装置测得的信号来自不同材料,由于光热反射测温结果与材料特性相关,这会导致引起较大的测温误差。

图5 无图像配准的测温图像
采用配准技术后,可以保证测温过程中被测件相对于测温装置的位置基本稳定,测温图像及温度值如图6所示,峰值温升约为37.4 ℃。图7是委托国外检测结构利用先进的NT220B光热反射测温仪对同一只器件在相同工作条件下进行检测的结果,峰值温升约为35.7 ℃。
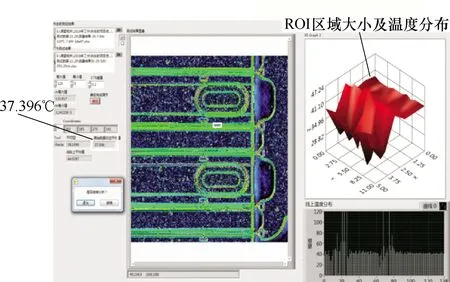
图6 自研装置的测温结果
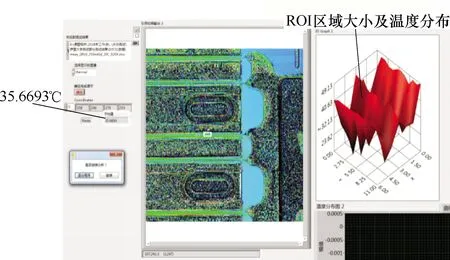
图7 NT220B光热反射测温仪的测温结果
除峰值温度外,两幅图像在某些区域的温度值差别较大,这主要是由于采用的测量波长存在差异[14,15]。国外机构采用的波长是365 nm,而我们采用的波长是530 nm。关于波长与材料相关性的问题将在后续工作中继续研究。
同时,可以明显看出国外检测机构得到的热分布图像质量优于本装置的结果,尤其是在两种材料的交界处没有明显的伪高温或低温现象出现。可能的原因是国外仪器采用的图像配准方法更加完善或具有波长优势。后续将继续进行技术完善。
4 结 论
研究的基于频域图像处理技术的图像配准算法,能实现对亚像素级位移量的计算。利用三轴压电平台、图像配准算法可有效补偿温度变化引起的X、Y方向的位移。通过本文技术手段,有效保证了测试期间被测件位置的稳定,实现了对GaN HEMTs成像温度检测。通过与NT220B光热反射测温仪测量结果对比,证实了图像配准技术的有效性。同时,对比也显示图像配准技术尚不完善,还需进一步研究。
