无源器件在片散射参数校准比较方法研究
2022-05-12吴爱华王一帮梁法国张立飞胡海龙
霍 晔, 吴爱华, 王一帮, 栾 鹏, 刘 晨,梁法国, 孙 静, 张立飞, 胡海龙
(1.中国电子科技集团公司第十三研究所,河北 石家庄 050051;2.中国西安卫星测控中心,陕西 西安 710043)
1 引 言
测试无源器件在片散射参数(S参数)前,需选用合适的校准方法对在片S参数测试系统进行校准[1,2],在片S参数测试系统主要由矢量网络分析仪、探针台、微波探针、在片校准件、微波电缆等组成。常用的校准方法有SOLT、LRRM和多线TRL等[3~7],每种校准方法对应不同的校准算法和校准标准,特点也不尽相同[8~12]。校准过程中,不同校准方法得到的系统误差项存在差异,导致测试得到的无源器件在片S参数会存在偏差,偏差的量值在国内未得到解决,使不同校准方法下的测试结果具有不确定性。
为了确定最大偏差值,美国国家标准研究院(NIST)对此进行了研究,开发了校准比较算法[13],校准比较算法通过比较不同的校准方法,计算得到相同被测无源器件S参数的最大偏差,在国际上得到了广泛应用[14~16],但其结论中缺少两个端口误差项之间的级联关系。国内尚未开展此技术研究工作。
基于上述问题,本文开展了无源器件在片S参数校准比较方法的研究工作,充分考虑了两个端口误差项之间的级联关系,多线TRL校准方法可以对传输线的特征阻抗进行准确定义,并且能够减少在片测试中的随机误差,因此在国际上被公认为在片校准准确度最高的校准方法[5,17~22]。通过以多线TRL校准方法为参考基准,建立SOLT、LRRM与多线TRL校准方法误差项差异的数学模型,使计算得到的无源器件4个S参数最大偏差更加完善,进行了试验与结果分析,与美国NIST的校准比较算法进行了比较,给出了此方法的实用性结论。
2 校准比较方法
2.1 建立误差项差异的数学模型
在片S参数测试系统校准时,系统误差项通常采用S参数表示[23],考虑到实际求解过程中误差项之间需要级联运算和参数转换,本文通过传输参数(T参数)与S参数之间的转换关系[24]进行计算,如式(1)和式(2)所示。
(1)
(2)
其它校准方法(SOLT、LRRM等)与多线TRL校准方法比较示意图如图1所示。以多线TRL校准方法的校准参考面为基准,其它校准方法与多线TRL校准方法的差异用图中的A和B表示。
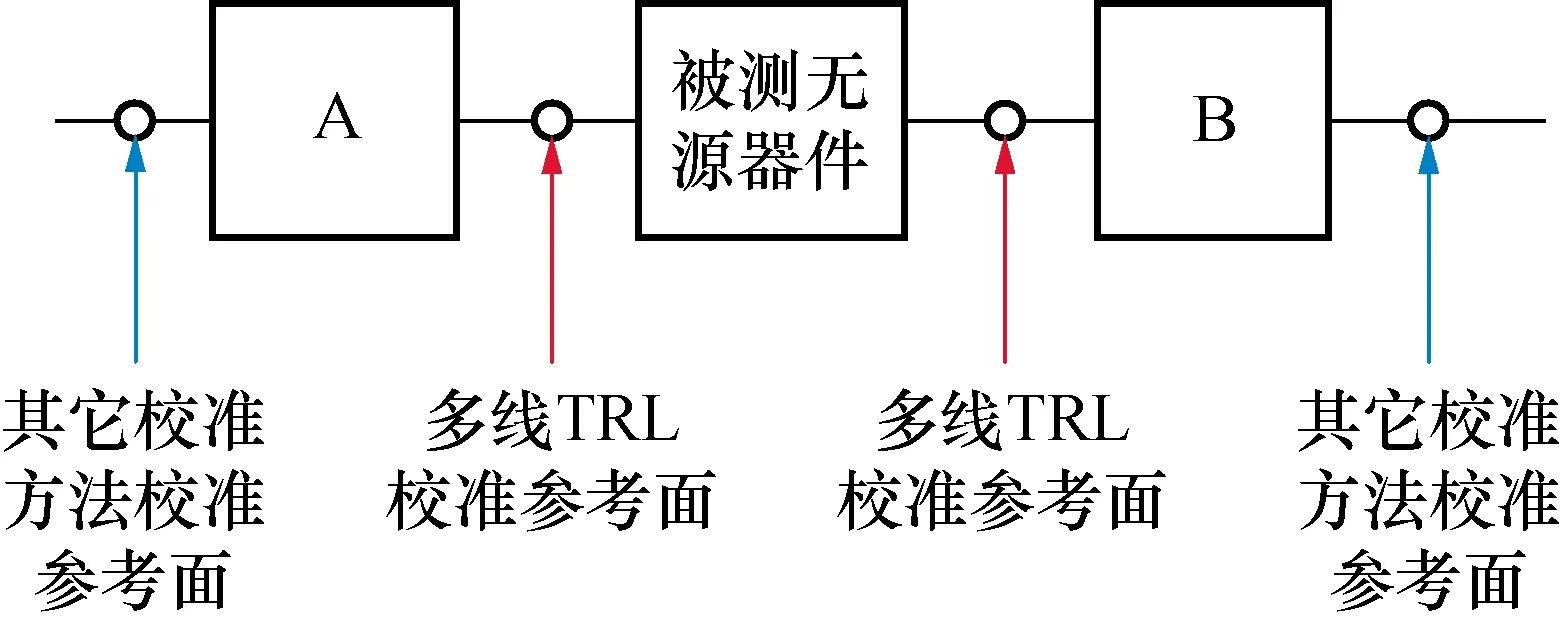
图1 校准比较方法示意图
选用某种校准方法对在片S参数测量系统校准后,得到式(3)。
(3)
式中:

(4)
式中:Mi为未经修正的在片S参数测量系统测得的两端口无源器件的传输矩阵;Ti为两端口无源器件的传输矩阵;X和Y是选用校准方法得到的两个端口的误差项。
选用多线TRL校准方法对系统校准后测量被测件,得到式(5)。
(5)
式中:MML为多线TRL校准方法下测量被测件的传输矩阵;XML、YML为多线TRL校准方法得到的误差项矩阵;TML为多线TRL校准方法下被测件实际传输矩阵。
其它校准方法对系统校准后测量被测件,得到式(6)。
(6)
式中:MS为SOLT、LRRM等校准方法下测量被测件的传输矩阵;XS、YS为SOLT、LRRM等校准方法得到的误差项矩阵;TS为SOLT、LRRM等校准方法下被测件实际传输矩阵。
理想情况下式(5)和式(6)相等,得到式(7)。
(7)
令:
(8)
(9)
理想情况下X1和Y1应为单位矩阵,但由于不同校准方法导致X1和Y1并不理想,与单位矩阵有偏差,偏差用式(10)和式(11)表示。
(10)
(11)
式中单位矩阵:
(12)
由式(7)~式(12)得到式(13)。
(13)
由于|ΔY1|≪1,则得到式(14):
(14)
由式(13)和式(14)得到其它校准方法与多线TRL校准方法下误差项差异的数学模型,如式(15)所示,式中包含了两个端口误差项之间的级联关系。
(15)
式中:
(16)
(17)
2.2 计算无源器件S参数的最大偏差
通过其它校准方法与多线TRL校准方法下误差项差异的数学模型,结合T参数与S参数之间的转换关系分别计算无源器件4个S参数的最大偏差。
由式(4)、式(10)、式(11)、式(15)、式(16)、式(17)得到误差项差异的数学模型的传输矩阵关系式(18)。
(18)
式中:
TA=T11+T11X11+T21X12-T11Y22-T12Y12-
T11X11Y22-T21X12Y22-T12X11Y12-T22X12Y12
(19)
TB=T12+T12X11+T22Y12-T11Y21-T12Y11-
T11X11Y21-T21X12Y21-T12X11Y11-T22X12Y11
(20)
TC=T21+T11X21+T21X22-T21Y22-T22Y12-
T11X21Y22-T21X22Y22-T12X21Y12-T22X22Y12
(21)
TD=T22+T12X21+T22X22-T21Y21-T22Y11-
T11X21Y21-T21X22Y21-T12X21Y11-T22X22Y11
(22)
2.2.1 计算S11最大偏差
由式(1)、式(2)和式(18)得到无源器件S11的关系式(23)~式(43)。
(23)
(24)
(25)
式中:

(26)
(27)
(28)
(29)
(30)

(31)
TD1=1+S11X21+X22+S22Y21-Y11
(32)
TD2=(S11S22-S21S12)X21Y21
(33)
TD3=S22X22Y21-S11X21Y11-X22Y11
(34)
S11S≈S11+S11A1+A2-S21S12A3+S11S22A4+

(35)
式中:
A1=X11+X22Y11-X22-X11Y11
(36)
A2=X12-X12Y11
(37)
A3=Y21+X11Y21
(38)
A4=X11Y21-X22Y21
(39)
A5=X12Y21
(40)
A6=X21Y11-X21
(41)
A7=X21Y21
(42)
|S11S-S11|≤|S11||A1|+|A2|+
|S21S12||A3|+|S11S22||A4|+


(43)
对于无源器件有|Sij|≤1[25],其中i,j=1,2。由式(43)得到S11最大偏差,如式(44)所示。
|S11S-S11|≤|X11+X22Y11-X22-X11Y11|+
(|X12|+|X21|)|1-Y11|+
(|1+X11|+|X11-X22|+
|X12|+2|X21|)|Y21|
(44)
2.2.2 计算S21最大偏差
由式(1)、式(2)和式(18)得到无源器件S21的关系式(45)~式(53)。
(45)
(46)
(47)
S11S22B4+S21S12B4
(48)
式中:
B1=Y11+X22Y11-X22
(49)
B2=X21Y11-X21
(50)
B3=Y21+X22Y21
(51)
B4=X21Y21
(52)

|S11S22B4|+|S21S12B4|
(53)
对于无源器件有|Sij|≤1,其中i,j=1,2。由式(53)得到S21最大偏差,如式(54)所示。

(|1-Y11|+|Y21|)|X21|+
(|1+X22|+|X21|)|Y21|
(54)
2.2.3 计算S12最大偏差
由式(1)、式(2)和式(18)得到无源器件S12的关系式(55)~式(64)。
(55)
式中:
TE=(T11T22-T21ST12)(1+X11-Y22+X22-Y11)
(56)
(57)
(58)
S11S22C4+S21S12C4
(59)
式中:
C1=X11+X22Y11-Y22
(60)
C2=X21Y11-X21
(61)
C3=Y21+X22Y21
(62)
C4=X21Y21
(63)
|S11S22C4|+|S21S12C4|
(64)
对于无源器件有|Sij|≤1,其中i,j=1,2。由式(64)得到S12最大偏差,如式(65)所示。

(|1-Y11|+|Y21|)|X21|+
(|1+X22|+|X21|)|Y21|
(65)
2.2.4 计算S22最大偏差
由式(1)、式(2)和式(18)得到无源器件S22的关系式(66)~式(82)。
(66)
(67)
(68)
式中:
(69)
(70)
(71)
(72)
(73)
S22S≈S22+S22D1+D2+S21S12D3+S22S11D4+

(74)
式中:
D1=Y11+X22Y11-Y22-X22Y22
(75)
D2=Y12-X22Y12
(76)
D3=X21Y22-X21
(77)
D4=X21Y12+X21Y11
(78)
D5=X21Y12
(79)
D6=Y21+X22Y21
(80)
D7=X21Y21
(81)
|S22S-S22|≤|S22D1|+|D2|+|S21S12D3|+


(82)
对于无源器件有|Sij|≤1,其中i,j=1,2。由式(82)得到S22最大偏差,如式(83)所示。
|S22S-S22|≤|Y11+X22Y11-Y22-X22Y22|+
(|Y12|+|Y21|)|1+X22|+(|1-Y22|+
|Y12+Y11|+|Y12|+2|Y21|)|X21|
(83)
经过推导,计算得到其它校准方法与多线TRL校准方法测量无源器件的4个S参数最大偏差如式(44)、式(54)、式(65)、式(83)所示。
3 试验与结果分析
在100 MHz~67 GHz频段,分别用多线TRL、SOLT、LRRM校准方法对同一在片S参数测试系统进行校准,得到相应校准方法下的系统误差项[26]。由式(24)、式(30)、式(36)、式(42)得到SOLT、LRRM与多线TRL校准方法测量无源器件4个S参数线性幅值的最大偏差,并与美国NIST的结果进行比较,如图2~图5所示。
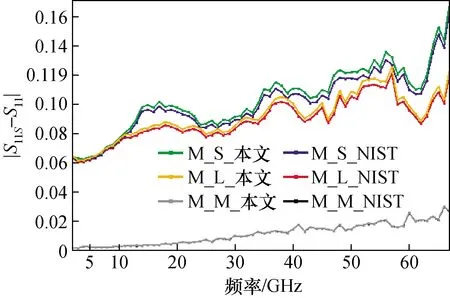
图2 SOLT、LRRM与多线TRL校准S11最大偏差
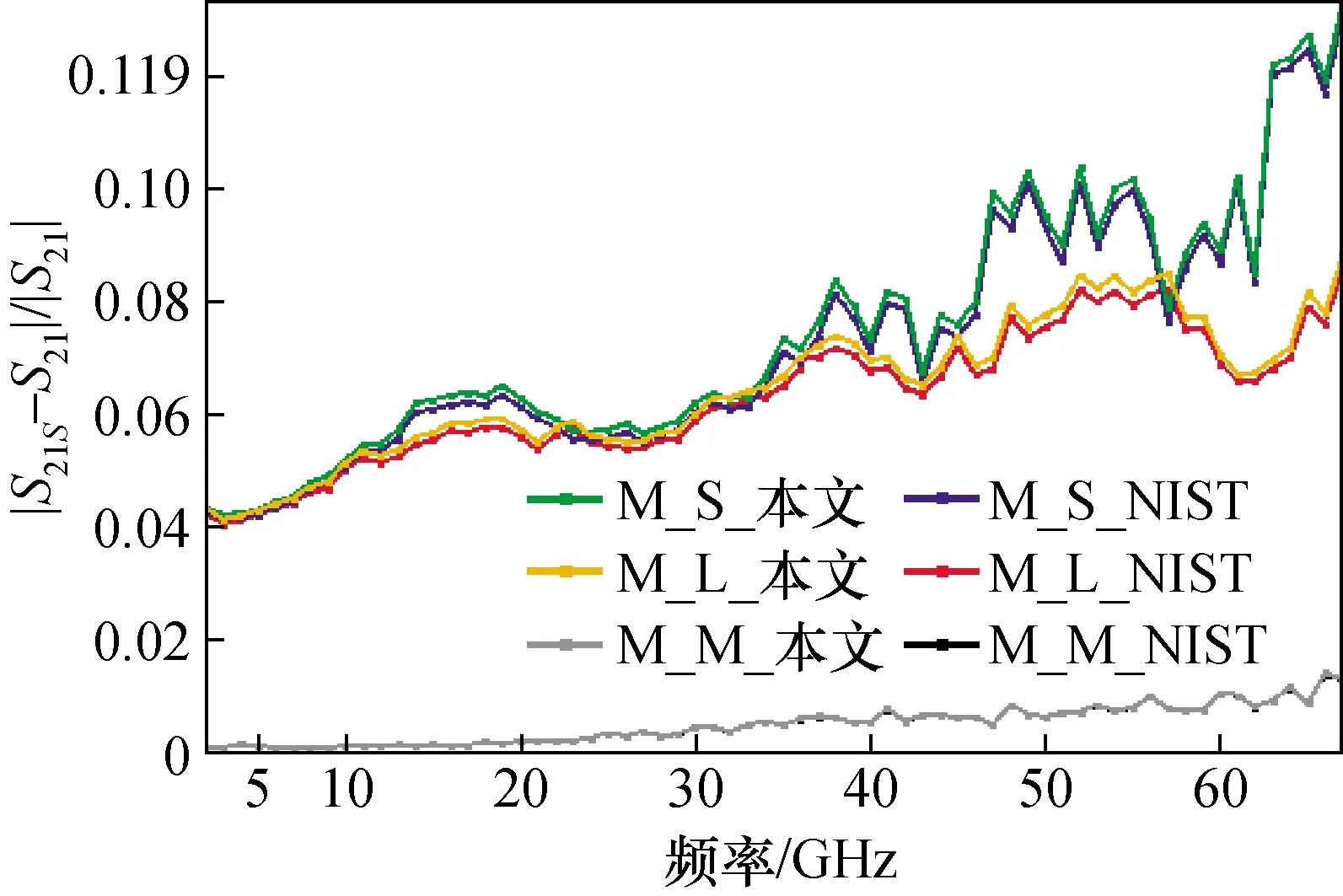
图3 SOLT、LRRM与多线TRL校准S21最大偏差
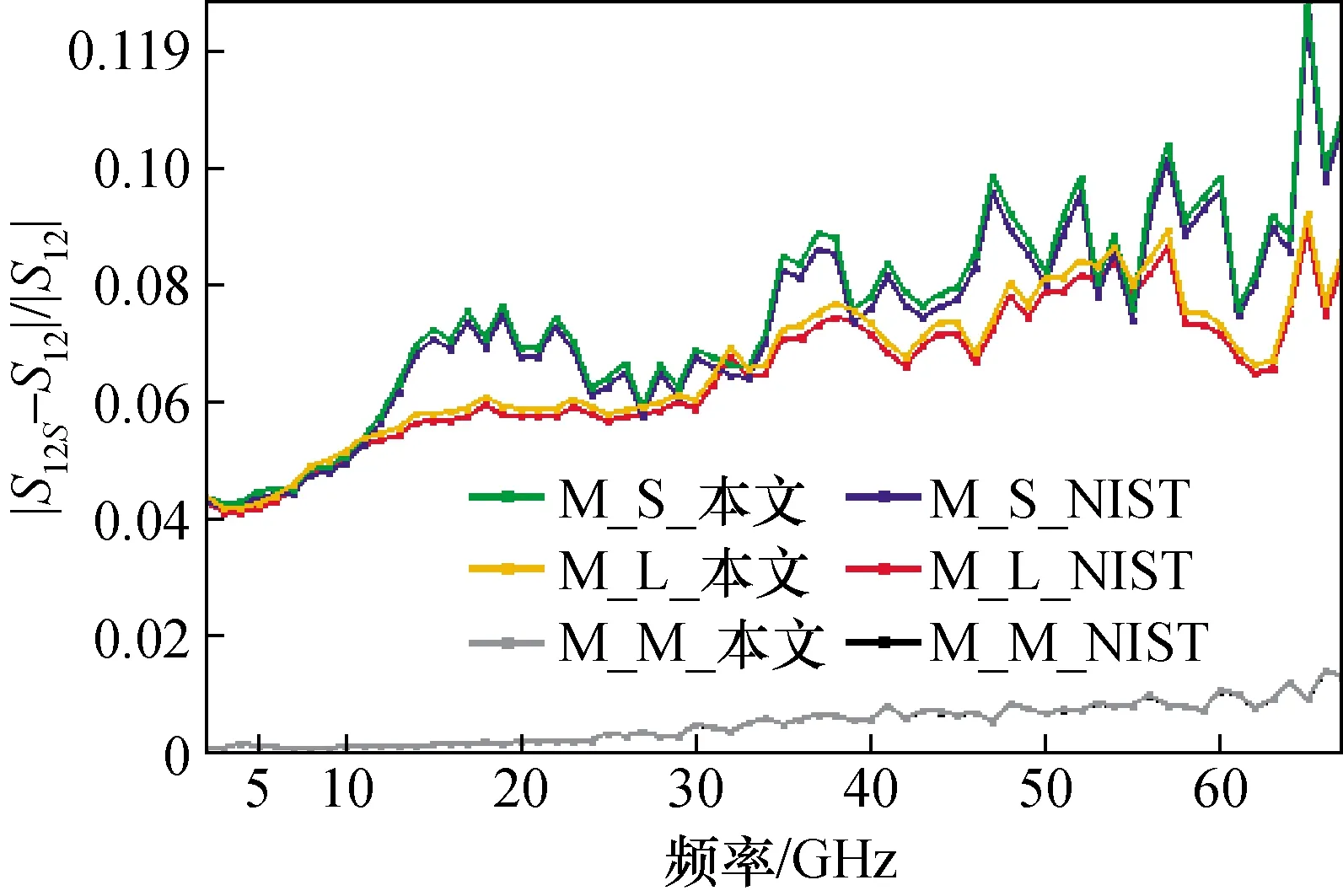
图4 SOLT、LRRM与多线TRL校准S12最大偏差
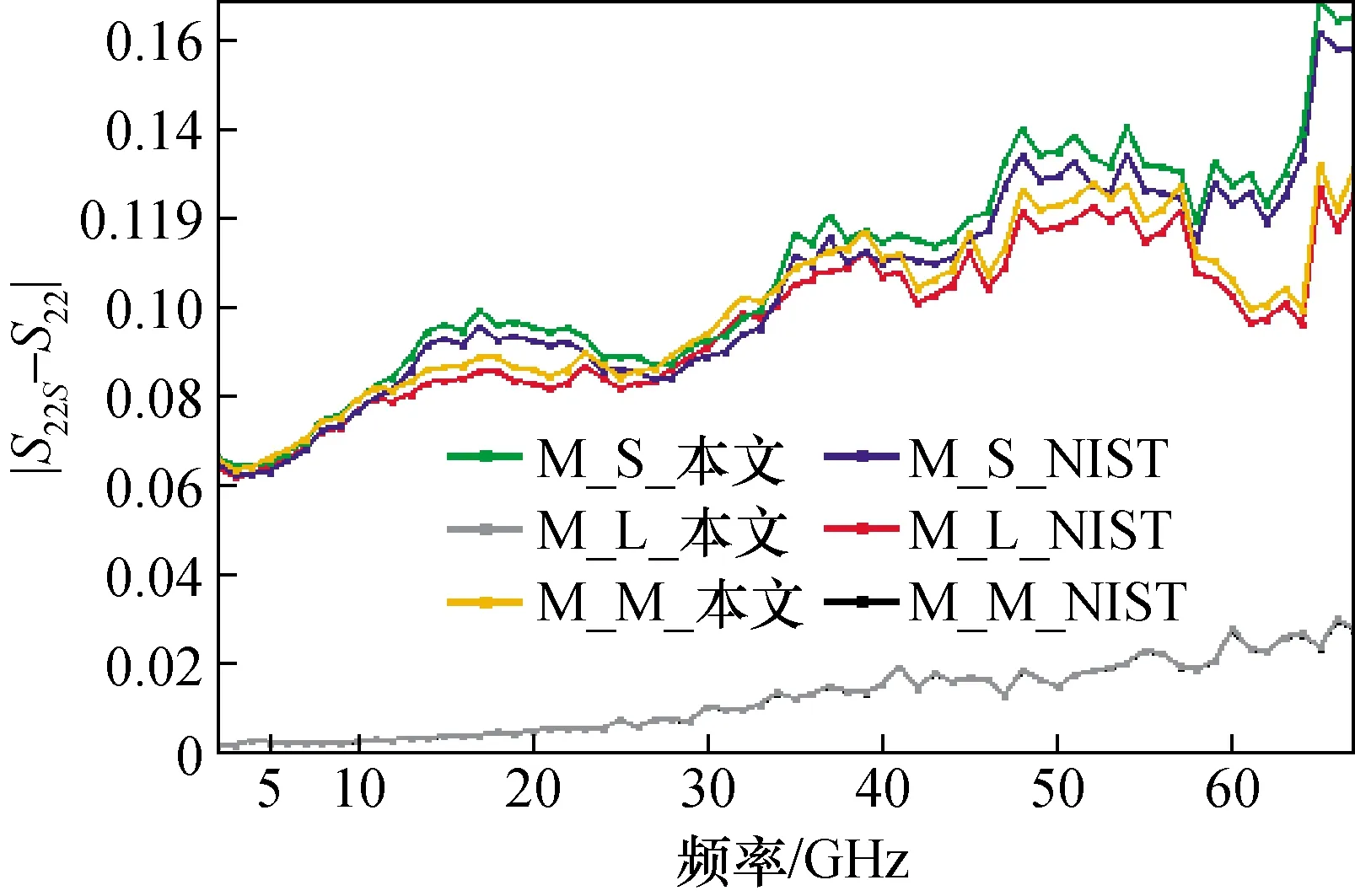
图5 SOLT、LRRM与多线TRL校准S22最大偏差
绿色曲线表示本文SOLT校准方法与多线TRL校准方法测量结果的最大偏差,蓝色曲线表示美国NIST得到的SOLT校准方法与多线TRL校准方法测量结果的最大偏差,两条曲线偏差值小于0.01;橘黄色曲线表示本文LRRM校准方法与多线TRL校准方法测量结果的最大偏差,红色曲线表示美国NIST得到的LRRM校准方法与多线TRL校准方法测量结果的最大偏差,两条曲线偏差值小于0.01;灰色曲线表示本文两次多线TRL校准方法测量结果的最大偏差,黑色曲线表示美国NIST两次多线TRL校准方法测量结果的最大偏差,两条曲线基本重合。
图2~图5所示测量结果中可得到如下结论:
第一,相比于美国NIST,本文充分考虑了两个端口误差项的级联关系,得到的4个S参数线性幅值的最大偏差比美国NIST偏大0.001~0.01,符合理论预期,验证了本文研究方法的合理有效。
第二,对于无源器件,如果SOLT校准方法与多线TRL校准方法4个S参数测量结果的最大偏差不大于绿色曲线中量值,LRRM校准方法与多线TRL校准方法4个S参数测量结果的最大偏差不大于蓝橘黄色曲线中的量值,两次多线TRL校准方法4个S参数测量结果的最大偏差不大于灰色曲线中的量值,表明无源器件在片S参数测量结果真实有效。如果超过相应曲线中的量值,表明在片S参数测量系统的校准不理想,出现了偏差,测试数据不可靠,需重新校准。
第三,在40 GHz及以下频段SOLT与LRRM准确度相当,在40 GHz以上频段LRRM比SOLT准确度高。能够指导设计和测试人员根据测试效率和测试准确度的需求选择合适的校准方法。
4 结 论
本文针对由于不同校准方法导致无源器件在片S参数测试结果存在偏差的问题,深入研究了SOLT、LRRM校准方法与多线TRL校准方法误差项的差异,推导得到误差项差异的数学模型,计算得到无源器件在片S参数的最大偏差。在67 GHz频段范围内进行了试验与结果分析,该方法能够判断无源器件的在片散射参数测试结果是否真实有效,指导测试时选择合适的校准方法。
