下肢外骨骼机器人的运动模式识别技术综述
2022-05-12张洋,谭昕
张 洋,谭 昕
(江汉大学智能制造学院,武汉 430056)
0 引言
如今智能机器人的研究是科学技术发展的最前沿热点,其所包含的科学技术以及制造过程所需要的工艺过程都体现了一个国家的科学技术水准的综合实力[1]。外骨骼机器人是一种能在人的主观意图下结合机械动力驱动的可穿戴与人一体化的智能设备,通过机械装置的运动和助力,可以使得人在正常活动中减少身体机能的消耗[2]。外骨骼机器人可以用于医疗器械、工厂生产、军事活动、抗险救灾等多个方面[3]。在使用外骨骼机器人时,机器人设备与人体同步运动时,需要及时通过传感器对运动时的物理信息进行采集提取,同时进行分析判断,才能实现人与机器的同步实时运动。目前国内外的外骨骼机器人主要使用的传感器分为两种,即测量力、位移、角度等物理量的传感器以及测量肌电(Electromy⁃ography,EMG)、脑电(Electroencephalography,EEG)等生物电信号的传感器。检测物理量的传感器在对应的外骨骼机器人中应用的比较成熟,但其本身的固有性质是基于人体对机器人设备的作用力来进行信息的传递,在作用过程中就存在一定的滞后时间,使得外骨骼机器人在运动中存在一定的滞后,不能完美地实现人机一体化运动。结合生物电信号的研究发现,肌电信号的产生总是超前于人体运动,其中表面肌电信号(Suface EMG,sEMG)采集方便且对人体无损伤,受到广泛的研究使用。利用肌电信号的超前特性,应用于外骨骼机器人设备中能大大提升设备的实时性能。
本文简要说明了最具代表性的下肢外骨骼机器人的现状,讲述了其工作的模式以及在运动过程中需要提取的信号。通过概括分析当下的相关技术特点以及应用的方面,对当下的外骨骼机器人识别处理过程中的关键问题进行了论述,并展望了未来的发展提升方向,为后续研究提供借鉴。
1 外骨骼机器人的运动信息采集
1.1 鲍登绳结构外骨骼机器人
鲍登绳结构是在生活中常见的一种应用在外骨骼机器人中的结构,图1所示为应用了鲍登绳结构的外骨骼机器人的膝关节结构的实物图。图2所示为实物图的三维模型,其主要的动力是依靠鲍登绳的拉力带动关节处的轴旋转模拟人体的大腿、小腿、膝关节的抬腿运动[3]。这套设备的主要目的是为了在人行进过程中减少人体机能消耗,人在抬腿时通过鲍登绳拉动弹簧,弹簧在收缩过程中储存弹性势能,行进时腿缓慢放下过程中,弹簧储存的弹性势能释放,势能转换为鲍登绳的拉力带动膝关节弯曲,节省人体的能量消耗[4]。这套装置对运动信息的采集依靠力传感器和角度传感器反馈的物理信息。如图3所示,力传感器和角度传感器所测得的电压通过芯片的处理获得有效的数值反馈给主机程序,直观地呈现出来[5]。此套设备的优点在于结构简单,便于控制且成本较低,但其依靠鲍登绳作为机构运动的动力,响应时间过慢,与人体一体化程度不高,且鲍登绳使用上磨损较大,会使得机构运动准确性进一步下降[6]。

图1 鲍登绳外骨骼机器人实物

图2 鲍登绳外骨骼机器人膝关节结构
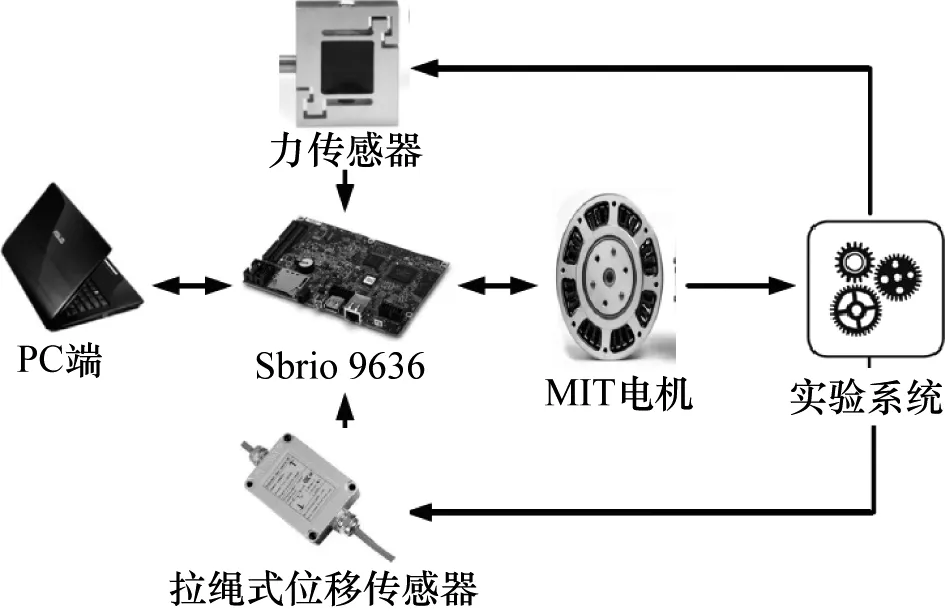
图3 传感器信息传递
对于鲍登绳外骨骼机器人,在人体运动过程中所需要采集的运动信息单一,只需要一个对一个关节的力和位移进行采集分析,其优点是数据直观清晰,能明确地判断出人体的运动状态以及下一步的运动轨迹,但其绳结构的本身通过电机驱动,无可避免使得它的响应速度缓慢,无法实现运动中的步态一致,即使通过软件算法的优化也只能消除而不能避免滞后的存在。
1.2 多传感器外骨骼机器人
不同于鲍登绳结构外骨骼机器人,图4所示为一种多传感器外骨骼机器人。这款外骨骼机器人的主体躯干结构与传统的鲍登绳结构的外骨骼机器人的结构类似,但是他优化了其中的鲍登绳材料,取消了鲍登绳和弹簧的柔性缓冲结构,替换成了谐波减速器和电机作为运动的驱动力,使其在运动的过程中相应速度提升,同时增加了机器人的整体使用寿命[7]。其中倾角传感器、角度传感器、角加速度传感器等多传感器构成传感器系统,传感器系统采集人体躯干的倾角、髋关节的运动角度信息、膝关节和踝关节的运动角度信息以及足底压力传感器进行人体的步态分析[8]。

图4 多传感器外骨骼机器人实物
其中倾角传感器测得人体躯干的倾斜角度,实时反馈人体运动时的身体倾斜情况,防止运动时摔倒。通过足底的压力传感器信息得到人在进行周期性行进动作时对应的相位动作信息,推断出下一次落脚位置和时间等物理信息[9]。角加速度传感器和角度传感器所测得角加速度和旋转的角度对应着髋关节、膝关节、踝关节在人体行进中的运动角度和速度,通过这些信息结合设备本身的尺寸可以反推出各个关节点的运动轨迹,用来模拟正常人行走的步态信息。采集到这些信息之后在电脑芯片中进行模型的训练就可以帮助穿戴者在运动中节省人体的机能消耗,也可以用于医疗设备中帮助残疾病人进行康复性训练实现正常的行走[10]。
此设备的优点比较于鲍登绳外骨骼机器人是添加了外骨骼机器人的智能性,使他不再单一于减轻人体的运动时的消耗。结合了多种传感器,通过传感器的反馈信息可以对人体的运动进行分析和预测,不仅可以提高机器人在运动中的相应速度,还可以保证机器人在长期使用中的损耗时精度不受影响[11]。此设备大大优化了鲍登绳结构外骨骼机器人存在的缺陷,在其中添加了多个角度传感器,通过提取人体运动时的关节角速度与角加速度这两个物理量,结合人体的步态规划可以动态地分析人体运动中的意图,即角加速度判断下肢的运动是加速还是减速预测下一步的运动意图,提升了外骨骼机器人的性能,但在其相应的快速性上始终存在不足,这种设备的信息传递始终是人体作用于刚性的机械设备产生相互作用力之后传递的信息,此信息滞后于人体的运动,在运动之后才能通过传感器传递人体的信息,从而进行下一步的运动分析和预测工作,这是这套设备存在的缺陷。
1.3 肌电信号外骨骼机器人
当下研究的热点是一种结合人体生物电信号的外骨骼机器人,其所采集的表面电极产生机理如图5所示。由图可知,表面电极的产生先于人体肌肉产生的收缩力,所以能优化外骨骼机器人人机合一上时间响应的问题[12]。

图5 人体肌电信号产生过程
表面电极的采集常用的有针电极采集和表面肌电电机片采集。针电极采集人体表面电极是通过电极针插入到需要采集的肌肉中,在人体运动时检测出肌肉的表面电极变化。电极片则只需要贴附于人体肌肉表面检测即可,但是这种方式所采集的电极信号收到外界噪声以及设备本身的干扰较大,需要进行信号的处理分析[13]。
如图6所示,肌电信号外骨骼机器人的设备构成有别于多传感器外骨骼机器人的主要是在硬件部分的设备。它不再使用传感器所传递的信号来判断人体的运动意图,而直接提取人的生物信号来判断人的运动意图,这样避免了传感器机器人本身存在的信息滞后性,提高了人体运动时机器的响应速度,使得人机交互更加密切[14]。此设备当下的难点在于肌电信号所包含的人体信息十分复杂,在实验处理过程中为了消除其他因素的影响要进行滤波处理得到要实验分析的生物电信号,即得到的信号只能控制单一关节的动作,无法实现多关节的连续动作控制,存在着控制的局限性,不能对人体的整体运动进行广泛地控制,还需要结合力传感器等多信号交互进行人体动作的识别控制。
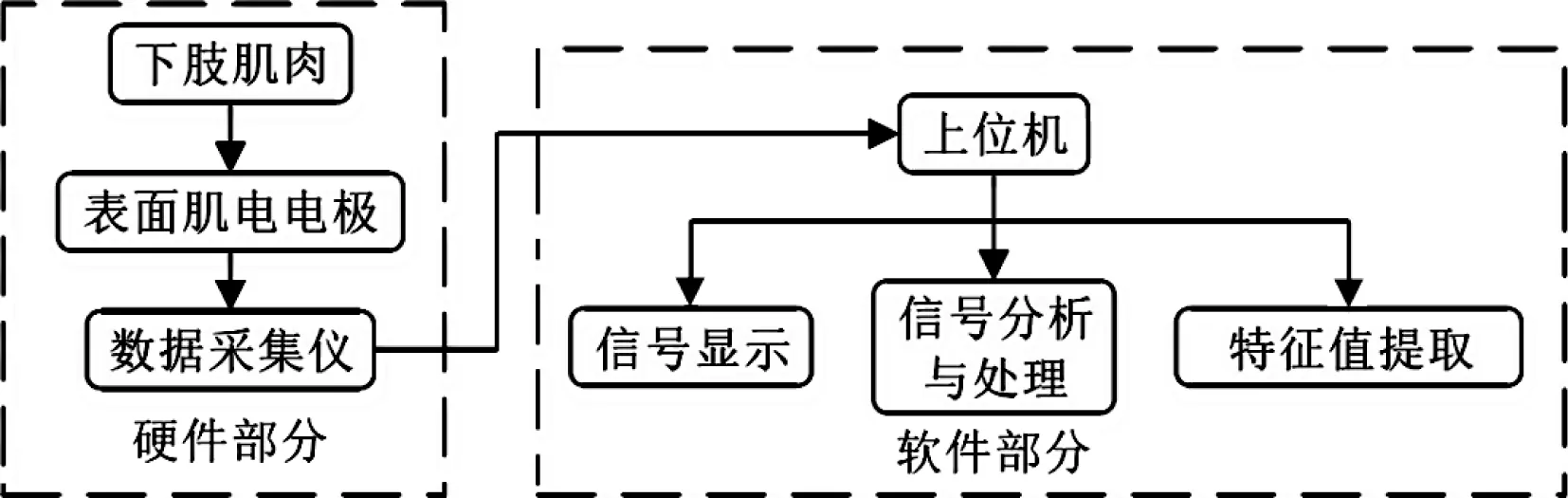
图6 肌电信号外骨骼机器人信号传递
2 外骨骼机器人的运动模式识别
2.1 运动模式信息预处理
如图7所示,对于传感器采集到的运动信号,在信号的采集和传输的过程中,难以避免地会受到温度、噪声、摩擦力等外界因素的干扰,会收集一些对运动信息无用的干扰信息。这种情况下,需要对传感器采集到的信息进行过滤处理,剔除外界干扰信息等无用的信息。在对传感器采集的原始数据进行处理时,可以采用巴特沃斯低通滤波器、FIR低通滤波器、小波去噪等进行去噪处理[15]。但在原始信号中,人体的运动信号与外界的噪声信号存在重叠的情况,考虑到信号失真的情况不适用巴特沃斯低通滤波器和FIR低通滤波器[16]。

图7 模式识别流程
对于表面电极片所采集到的电极信息同样存在着电子器件、辐射、噪声等干扰因素的影响,同样需要对原始信号进行去噪处理。表面电极片采集到的信息可以通过数据采集仪传输至电脑主机中直接通过软件进行处理。对原始信号的处理可以通过Matlab/Simulink中的Filter Designer设计满足要求的滤波器提出外界干扰因素的影响[17]。在处理噪声的同时要考虑到人体肌肉激活度的问题,人体肌肉肌肉激活度到达一定值时才会有相应的动作运动,因此在处理过程中要另外设计一组滤波器处理人体肌肉激活度得到有用的运动信息。
2.2 运动模式信息特征提取
传感器采集到的运动信息做预处理后,进一步将人行走过程中的膝关节角度和角速度、髋关节角度和角速度、大腿角速度各个数值进行平均值、均方差、均方根、相关系数、偏度的数学处理,得到各个动作对应的特征数值为运动模式识别做数据基础[18]。
表面电极片采集到的运动信息做预处理后,通过肌肉电极激活度测得人体肌肉的收缩力大小,再根据人体肌肉的长度,表达出关节的力矩和关节转角[19-20]。此部分的处理在于肌电信号在时域上划分处理,划分出不同运动过程中的表面肌电电机的数值,得出相应动作时的电极数值,为后续的运动模式识别打下数据基础。
2.3 运动模式识别分类器
当下应用于外骨骼机器人中的分类器都是基于前期采集的特征数据,分析处于不同运动模式下的数据特征差异来判断进行分类都是在有监督学习框架下的工作模式识别。本文主要介绍几种常见的分类器。
2.3.1 KNN算法
K最近邻算法是一种懒惰算法,其原理十分简单,是记录所有样本数据,计算出一个和所有样本数据最接近的训练数据,依次来判断新的数据分类是否符合条件。此算法的优点在于简单、易实现,但其样本计算量巨大,可解释性差,使用于稀有事件分类。
2.3.2 GA-BP神经网络
GA算法——遗传算法,是一种模拟自然界遗传机制的算法,其原理是依据所需的适应度函数,通过遗传中的选择、交叉和变异对样本个体进行筛选,样本个体中适应度高的个体数据被保留下来,反复循环下来得出最适应的样本[21]。
BP算法——误差反向传播算法,其原理是在前馈网络中,基于输出信号与标记信号的误差比较,通过误差的大小利用梯度下降算法调整神经元权值[22]。
结合两种算法的优点,将GA算法的全局性好的优点和BP算法的最优解精准的优点相结合,提高神经网络的稳定性。
2.3.3 极限学习机
极限学习机(ELM)是一种新型的快速学习算法,其主要是训练单隐藏层前馈神经网络。ELM可以随机初始化输入权重和偏重并得到相应的输出权重,不同于传统算法的人为设定。依据Moore-Penrose广义逆矩阵可以对单隐藏层神经网络解出,因此训练参数减少,训练速度加快[23]。
2.3.4 支持向量机(SVM)
SVM的原理是将样本的特征向量映射到空间之中,SVM的目的就是将这些空间中的点用一个超平面将其划分为不同的种类区分开来,训练所使用的算法来求出这个超平面即为SVM[24]。
依据图8所示的算法设计框图,结合上述的分类器可以将前期采集得到的数据进行分类处理。将数据运用算法进行模型训练,得到训练模型之后就能对需要测试的数据进行验证,测试训练模型的准确性。
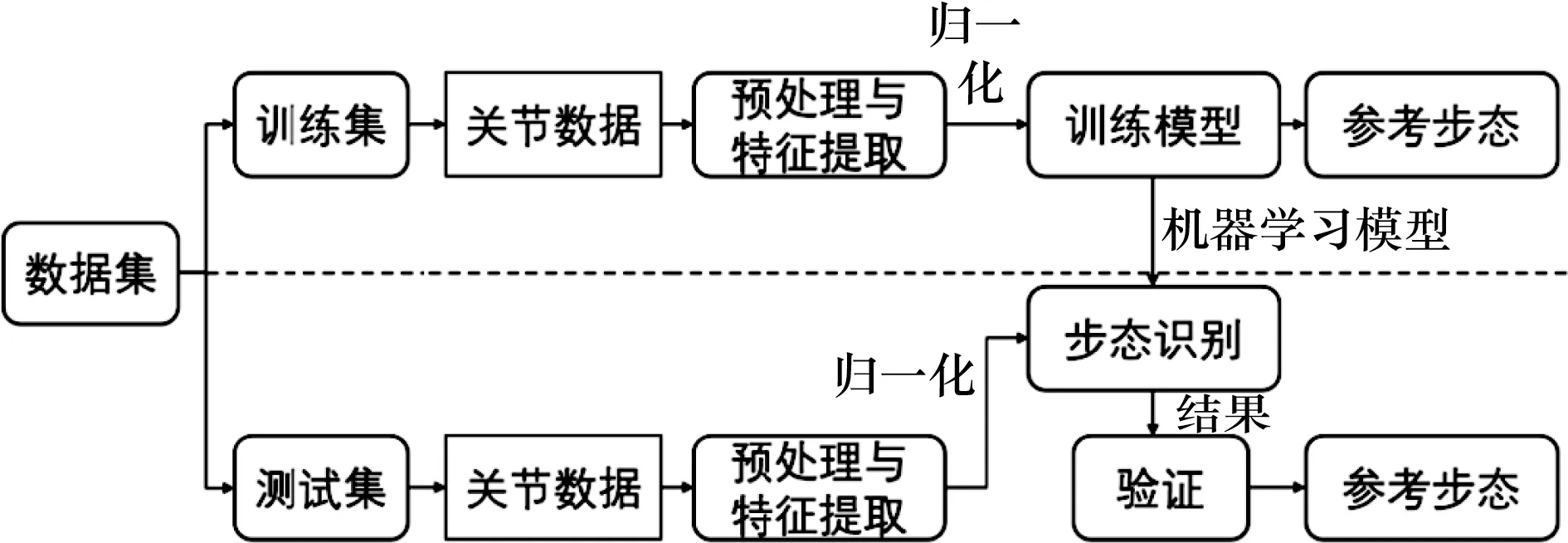
图8 分类器模型设计流程
在使用KNN算法时,K值的设定会在较大程度上的影响分类结果,固需要多次验证合适的K值找寻最适用的K值进行分类。对于GA-BP神经网络和极限学习机算法来说,其中的隐藏层影响着着分类的准确性,因此要对隐含节点的个数进行验证,调整到最好的准确率再进行验证实验。在使用SVM时,要调整对应模型的惩罚因子C和函数的系数g得到最适合的训练模型。
在多种算法的使用过程中,能发现对特征信号的识别分析的准确性还需要人为地调试从而不断提升,所以在算法的设计过程要充分考虑人体的运动周期,对运动周期系统化划分建立模型才能通过算法有效识别出人体的运动意图,结合人体的运动机理研究不断调整运动模型才能探索出最优化的分类算法。
3 结束语
外骨骼机器人的运动信息的采集大多数还是使用传感器,传感器的使用简单普遍,提取的信息也很直观和准确,这些都归功于现在传感器设备的不断更新换代,设备的精度和效率越来越高,大大提升了机器人运动应用方面的快速性和准确性。但其本身固有存在着的物理信息延时性的特点是无法通过传感器的升级换代和软件的优化消除掉的,所以人们在寻找着肌电信号的生物信息这种新型的信号应用于外骨骼机器人中来解决这方面的问题,使得人机交互更加紧密和迅速,让机器人的运动更加贴合人体的需求,达到人机一体的目的。目前的方式应当着眼于优化肌电信号的提取分析,不断明确人体运动对应的不同肌电信号,才能以此来控制机器人的运动。虽然目前对于的肌电信号的研究还没有那么彻底,但是已经有了肌电信号控制单一关节的成果,可以在此基础上利用肌电信号优先于人体动作的特点,再结合传感器等其他设备来控制其他的关节运动,可以优化延时性的问题,提高机器人的响应速度,解决目前存在的一些问题。
肌电信号的优点是显而易见的,在未来也是研究发展应用的热门技术难点。在未来的研究中应该关注以下的关键技术突破点:首先是人体的运动机理的研究和运动模式的系统划分,对人体的运动所需的生理条件进行更加完善和细致的分解,这样更有助于外骨骼机器人数据库的升级完善,提高运动过程的意图识别的准确性,并且也能改善目前肌电信号控制的单一性,使得肌电信号的对应动作不再是单一关节的动作,使得其控制效果更加全面。其次是总结外骨骼机器人针对不同身高体重的人群所具备的共性,使得外骨骼机器人的使用不再有局限性,不会使得不同人穿戴时出现运动识别上的错误,造成机器和人的运动不匹配的问题。最后则是当下的肌电信号外骨骼机器人所运用的肌电信号运动识别的控制单一,对下肢的整体运动无法进行完整的识别控制。即生物电信号所包含内容丰富,识别过程中的滤波处理只能得到单一设定的信号,对复杂运动的识别控制无法达到预期的效果。为了完善这一不足,在设备中加入物理信息的传感器,提取更多的信息融合分析,完善人体运动过程中的实时识别提高人机交互的实时性能。
