基于多目标优化的救援机械臂结构参数设计
2022-05-12赵江波修兵凯王军政张新
赵江波,修兵凯,王军政,张新
(1. 北京理工大学 复杂系统智能控制与决策国家重点实验室,北京 100081;2. 北京理工大学 伺服运动系统驱动与控制工信部重点实验室,北京 100081;3. 新兴际华集团有限公司技术中心,北京 100020)
我国是世界上发生自然灾害比较频繁的国家, 当前在地质灾害救援工作中,多依赖大型工程机械设备,其机动灵活性、工作效率、适应能力的不足限制了救援的效率[1−3].
因此,高效率、灵活可靠以及能够适应复杂地形的救援机器人成为自然灾害救援中的急需. 本文的研究对象为一种基于六轮足运动平台的双臂救援机器人,运动平台的腿部结构采用倒置的并联六自由度摇摆台,同时平台具有轮式、足式和轮足复合式三种运动方式,提高了平台运动的灵活性及适应能力[4−5]. 此外,通过解决双机械臂的结构参数综合优化设计问题使得双臂协同工作空间、机械臂末端运动速度以及机械臂负载能力得到优化,从而满足工作效率及可靠性的要求.
多目标优化是救援机器人设计的普遍手段[6−7].YAN 等[8]以空间机器人可操纵性最大化和基座扰动最小化为目标,采用多目标粒子群优化算法得到最优的结构参数;王鑫等[9]以机械臂各关节总功率、各关节角加速度以及各杆件总长的最小化为目标,利用多目标遗传优化算法达到最优目标;ZHEN 等[10]以空间六自由度并联机器人系统刚度和灵巧度为目标函数,依靠遗传算法和人工神经网络实现了优化目标;DAN 等[11]以并联机器人最优灵巧刚度和可达工作空间最大化为目标,利用粒子群算法对上述目标函数进行优化,得到理想的实验效果. 可见,关于救援机器人多目标优化的研究已经取得了一系列成果,但是还存在如下问题:①双臂协同工作空间作为一个极其重要的性能指标,目前的研究多是将其作为已知量或者一个约束条件而很少作为一个独立的优化目标函数,然而当其作为目标函数时,尚无法用明确的数学表达式对其进行描述;②现有的多目标优化方法往往只是给出参数的帕累托解集,但实际救援问题对可靠性与快速性提出了要求,因此需要针对性地给出一组明确的优化参数.
针对上述不足,本文创新性地提出了一种多目标优化设计方法:①基于三重积分,将双臂救援机器人协同工作空间作为一个独立具体的目标函数进行详细的数学描述;②基于模糊层次分析法[12],结合粒子群算法进行目标函数最优值求解,得到一组明确的机械臂结构优化参数.
1 救援机器人双机械臂运动学分析
运动学分析是验证机器人机构、动力学、轨迹规划和位置控制的重要组成部分[13]. 本文双臂救援机器人的仿真模型如图1 所示.

图1 双臂机器人结构模型Fig. 1 Dual-arm robot structure model
1.1 D-H 坐标系
机器人的运动学描述需使用两种坐标系,局部坐标系O0X0Y0Z0和全局坐标系OXYZ,且双臂局部坐标系关于全局坐标系对称. 由基体向末端执行器顺序对关节和连杆进行编号,基体从0 开始,关节从1开始,根据D-H法则[14],建立双臂救援机器人的D-H坐标系,如图2 所示.

图2 双臂救援机器人D-H 坐标系Fig. 2 D-H coordinate system of dual-arm rescue robot
1.2 运动学正解
6 个相邻关节的齐次变换矩阵如式(1)所示

1.3 雅可比矩阵
雅可比矩阵作为操作空间与关节空间的枢纽,满足

本文采用微分变换法[14]构造雅可比矩阵,可得到如式(3)所示的雅可比矩阵

2 目标函数及约束条件的数学描述
2.1 双臂协同工作空间目标函数
救援工作对于机械臂的协同工作空间有着极高要求,但协同工作空间很难进行详细的数学描述. 为了解决这个问题,本文首先基于蒙特卡洛法[15],借助式(4)对双机械臂的可达运动空间进行仿真

式中:unifrnd()为Matlab 中的均匀分布随机数生成函数; θ为 关节角的最小(大)值;N为常数.
通过Matlab 仿真得到的双臂工作空间如图3所示.
图3 中,两个不规则球体分别代表两臂各自的工作空间,二者的相交部分则是双臂协同工作空间.上述的工作空间是不考虑基座体积情况下得到的理想工作空间,实际上应保证双臂机器人不与基座相碰.

图3 双臂协同工作空间仿真Fig. 3 Dual-arm collaborative workspace simulation
由图3(b)可知,机械臂的协同工作空间在XOY面上的投影为一椭圆. 若用平行于XOY的平面去切割图3(a)所示的空间体,会得到若干个大小不一的椭圆截面,其中两端的椭圆面积最小,中间的椭圆面积最大.
若将最大椭圆与最小椭圆之间的部分分为n个大小不等的椭圆柱,每个椭圆底面的长轴lj与短轴sj可表示为
式中L为基座间距.
每个椭圆柱的底面积为

则每个椭圆柱的体积可以表示为

式中 dz为每个椭圆柱的高度.
基于这一思路,可以通过三重积分求体积的方法来表征双臂的协同工作空间,即

式中;lmax、smax为 最大椭圆的长轴与短轴;lmin、smin为最小椭圆的长轴与短轴;zmax为 空间体在z轴上的最大值;Vw为实际工作空间;Vp为 基座所占空间,为常量;F1(γ)为救援机器人双臂协同工作空间目标函数,

本文所研究的一类双臂机器人D-H参数表如表1 所示.
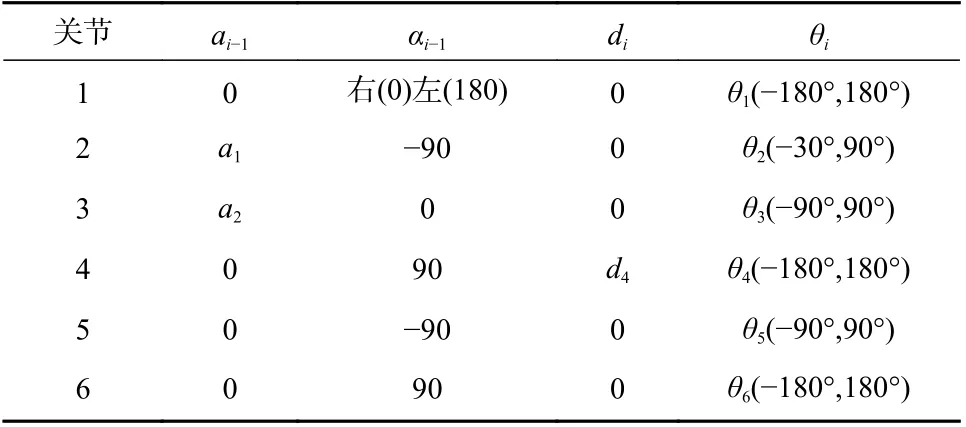
表1 机械臂D-H 参数Tab. 1 D-H parameters of manipulators
由式(1)及双臂机器人D-H参数表可知右左两臂末端执行器的位置坐标表达式为

式中:s23=sin(θ2+θ3);c23=cos(θ2+θ3).
由式(5)、(8)及(9)可知,长轴lj与短轴sj进一步表示为

进一步可求zmax,lmax,lmin,smax,smin.
①zmax.
由式(8)、(9)可知,zmax可表示为

式中:f1(θ2,θ3)=dcos(θ2+θ3);f2(θ2)=−a2sinθ2.
根 据 表1, θ2∈[−30°,90°], θ3∈[−90°,90°]. 当θ2+θ3=0 且 θ2=−30° 时 ,f1(θ2,θ3)与f2(θ2)同时取得最大值,便可求得zmax.
因此z的最大值为

此时, θ2=−30◦, θ3=30◦.
②lmax,lmin.
根据表1,θ2∈[−30°,90°],θ3∈[−90°,90°], 结合lj=|(a1+a2cosθ2+dsin(θ2+θ3))|可 知,当θ2=0 且 θ3=90°时,lj取得最大值

基于①分析, θ2=−30◦, θ3=30◦时 取得zmax,从而lj取得最小值,可得lmin为

③smax,smin.
根据②的分析,同理可得smax,smin为

2.2 机械臂末端运动速度目标函数
执行机构的运行速度,即机械臂末端运动速度是救援任务及时完成的直接保证. 本文采用可操作度来表征机械臂末端运动速度,可操作度最早由KLEIN 和YOSHIKAWA 定 义[16],可 由 机 械 臂 的 雅 可比矩阵表示,如式(16)所示


在笛卡尔空间中机械臂末端运动速度矢量为

式中:v为速度;tend为速度方向单位矢量.
式(17)可改写为

由上式可知, det(JJT)越大,末端运动速度越大.为了评估机械臂末端在工作空间上的整体速度性能[17−18],定义机械臂全域末端运动速度目标函数为

式中 γ=[aαdθ].
2.3 机械臂负载能力目标函数
救援现场往往有重物需要搬运,这对机械臂的负载能力提出了考验. 本文同样采用可操作度来表征机械臂负载能力. 对机械臂受力分析可得

式中F、Fg、Fl为驱动系统动力、机械臂自身重力和机械臂负载能力.

在笛卡尔空间中机械臂负载力矢量为Fl=fltend,式(21)可改写为

由上式可知, det(JJT)越小,机械臂负载能力越大. 同样定义机械臂全域负载能力目标函数为

2.4 约束条件
① 实际工况下结构参数约束.
受救援任务下实际工况的影响,机械臂结构参数的范围受到一定约束,即

②末端运动速度波动约束.
救援工作要求末端运动速度不能有较大波动[19].式(19)表征的是工作空间内末端运动速度的平均值,不能提供速度的波动信息. 因此定义 σspeed评估速度的波动程度

为使机械臂末端运动速度稳定,需 m in(σspeed).
③机械臂负载能力波动约束.
同理,定义 σforce评估负载能力的波动程度

同样需 min(σforce).
④耦合约束.
定义若存在耦合区间,且Fij(γ)为 耦合区间内第i个目标函数的第j个极值,有

式 中: ε ∈(0,0.1);Fi(γ)ini、Fi(γ)end为耦合 区 间 端 点 的函数值. 则认定该组耦合区间的耦合程度较低.由式(1)可知,ai∈[aimin,aimax],αi∈[αimin,αimax],di∈[dimin,dimax],θi∈[θimin,θimax], 对每个取值范围n等分,每个参数均取一个等分的区间. 若所取区间满足上述定义,则可作为耦合约束条件.
选择符合要求的一组耦合区间如下
3 基于模糊层次分析的综合优化函数
本文利用模糊层次分析法确定加权系数,建立多目标线性加权综合优化函数,将多目标函数转化为单目标函数.
3.1 模糊层次分析
模糊层次分析法是用模糊数衡量目标函数之间的关系.
其具体实现过程分为:层次模型、判断矩阵、一致性检验和确定权重[12].
① 层次模型.
图4 为层次模型示意图,最顶层是优化目标,中间层是依据的准则,最下层是三个目标优化函数. 其中,下层影响上层,因此每一分支中,下层的权重和加起来等于上层的权重和.

图4 层次模型Fig. 4 Hierarchical model
②判断矩阵.
判断矩阵是对三个元素进行两两分析,从而确定目标函数之间的重要程度. 两元素间的重要程度以表2 中的标度来衡量.

表2 标度的含义Tab. 2 The meaning of scale
目标层与准则层之间的判断矩阵一般可根据救援机器人的设计目标要求以及专家经验进行建立.本文中,判断矩阵取值为

③一致性检验.
Ⅰ)计算判断矩阵最大的特征值 λmax和一致性指标IC

Ⅱ)如表3,查找平均随机一致性指标IR

表3 随机一致性指标Tab. 3 Random consensus index
判断矩阵维度为3,所以n= 3,则IR=0.52.
Ⅲ)计算一致性比例η

因此判断矩阵的一致性在可接受范围内.
④确定权重.
将判断矩阵的每一列求和,得到如下向量

比较矩阵每个元素除以对应列的列和

利用算术平均法求权重的均值,则计算的权重向量W1=[0.539 3 0.297 4 0.163 3].
按照上述步骤,便可以得到选择层与准则层之间的权重矩阵为

3.2 多目标综合优化函数
为了消除单目标优化存在的量纲问题,本文采用min-max 标准化方法对目标函数进行归一化,经过以上分析,可以确定优化函数模型如下式

双臂协同工作空间目标函数F1(γ)与机械臂末端运动速度目标函数F2(γ)是求极大值,机械臂负载能力目标函数F3(γ)是求极小值,为了将三个目标函数转化为求极小值问题,将归一化的F1(γ)和F2(γ)取相反值.
4 综合目标函数求解与结果分析
为了验证所提方法的有效性,利用实验室自行研制的机械臂平台进行实验,如图5 所示,该双臂机器人的D-H参数如表1 所示. 以a1,a2,d4作为优化变量, γ=[a1a2d4],可对应得到实验室机械臂平台的双臂协同工作空间目标函数、机械臂末端运动速度目标函数以及机械臂负载能力目标函数的表达式.
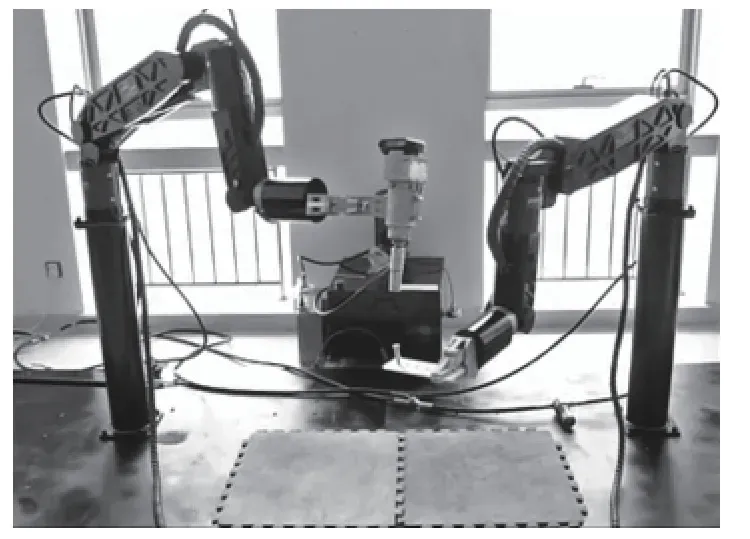
图5 双臂机器人Fig. 5 Dual-arm robot
4.1 粒子群优化求解
本文采用粒子群优化算法[20]对求得的3 个目标函数解析式进行优化求解,设定粒子群规模为100,最大迭代次数为200,最小适应值为−1,最大速度为0.01,最小速度为−0.01. 将式(38)所示的综合目标函数带入算法中,得到的最优值与最优解如图6 所示,此时最优值为−0.892 3,最优解a1= 1.598 5 m,a2=1.199 3 m,d=0.699 5 m.
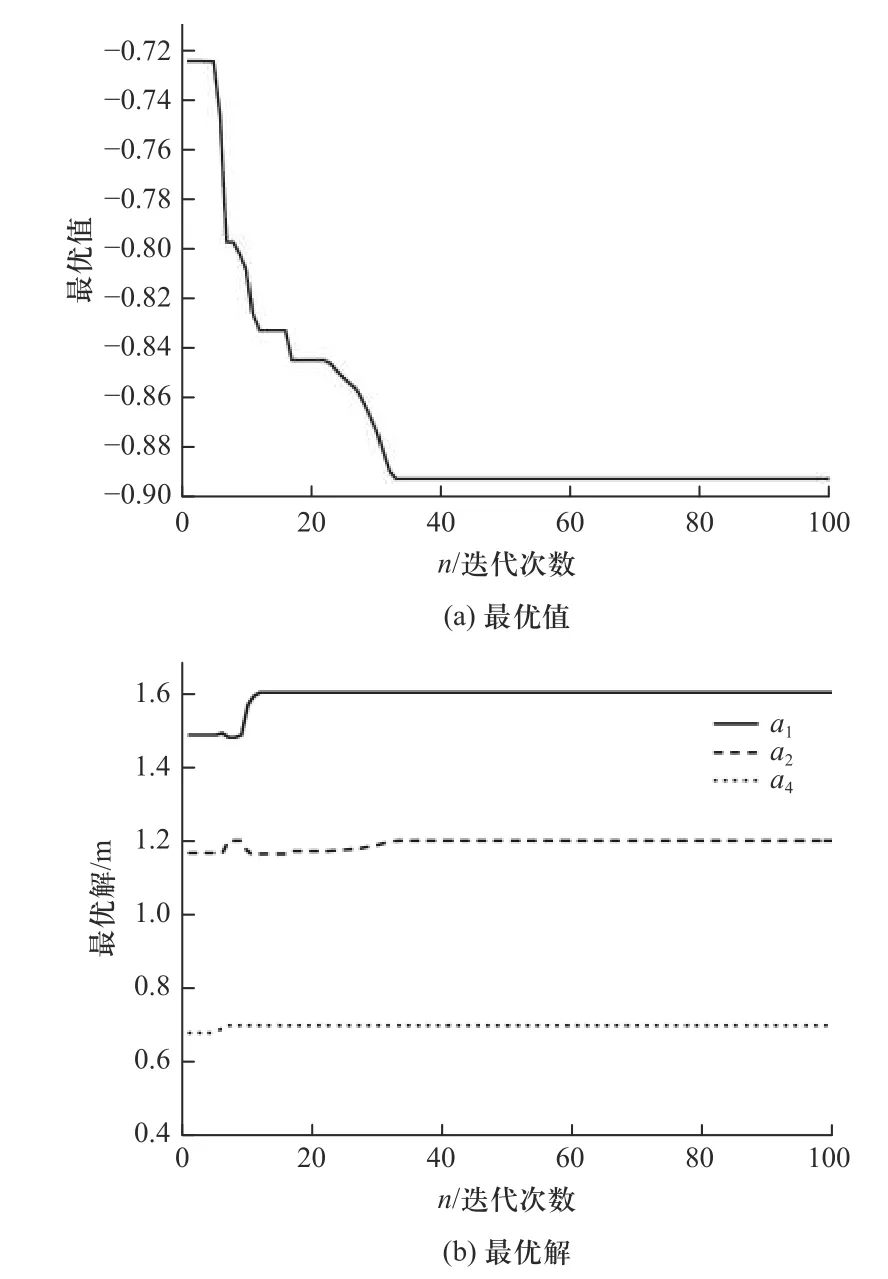
图6 最优值与最优解曲线Fig. 6 Optimal value and optimal solution curve
经过粒子群优化求解后,优化前后的参数值如表4 所示,根据优化后机械臂的三个结构参数对双臂机器人进行改进.

表4 优化前后的参数Tab. 4 Parameters before and after optimization
4.2 优化结果分析
为了验证改进后的双臂机器人的各项指标,即:双臂协同工作空间、末端运动速度以及机械臂负载能力得到了提升,分别对三项指标进行测试和计算.
①利用三重积分法求得改进后的双臂机器人的协同工作空间.
将改进后的结构参数a1,a2,d4代 入zmax,lmax,lmin,smax,smin中,进而通过三重积分法求得协同工作空间的体积.
②计算求得机械臂末端运动速度.
为了得到优化后的末端运动速度,机械臂末端的期望运行轨迹设置为:左臂末端期望轨迹xdl=[0.6t−0.3 0.7]Tm,右臂末端期望轨迹xdr=[0.6t0.3 0.7]Tm,同时负载设置为132 kg(未优化机械臂处于最长力臂状态下的最大负载). 由于机械臂末端运动速度的测量可能受到噪声的影响,会影响系统性能,甚至会导致系统的不稳定,因此不可直接测量末端运动速度. 为了避免上述现象的发生,设计一个状态观测器[21]如下所示

③力传感器测得机械臂负载能力.
负载能力指机械臂末端在工作范围内的任何位姿上所能承受的最大负载,为了得到优化后的机械臂负载能力,设置机械臂处于最长力臂状态,利用安装在末端的HPS-FT025 六维力传感器(精度为0.001 N·m)测试末端在最长力臂状态下所能承受的最大负载.
将计算得到的双臂协同工作空间的体积和机械臂末端运动速度,以及通过安装在机械臂末端的六维力传感器测得的机械臂负载能力,记录在表5 中.为了形成对比验证优化效果,将原机器人的性能指标值同样记录在表5 中.

表5 优化前后的性能指标Tab. 5 Performance indicators before and after optimization
通过对结构参数优化前后的双臂机器人进行对比测试,可以表明优化后各项性能指标有了较为明显的提升,双臂协同工作空间增加9.5%,末端运动速度提高7.8%,机械臂负载能力提升6.1%.
5 结 论
①本文对双臂救援机器人进行多目标优化研究,选取双臂协同工作空间、末端运动速度和机械臂负载能力作为目标函数. 利用蒙特卡洛与三重积分相结合的方法求得工作空间,利用可操作度描述了机械臂末端运动速度与负载能力.
②为了达到综合性能最优化,以提出的三个目标函数作为优化目标,结合模糊层次分析法获得的权重将多目标优化问题转化为一个单目标优化模型,采用粒子群优化算法对机械臂的结构参数进行优化,得到了满足实际需求的最优解.
③通过与原设计比较表明优化后的双臂救援机器人工作空间增大、末端运动速度变快以及负载能力提高,从而验证了本文提出的优化目标和方法的有效性.
