非正弦升沉运动对扑翼自主推进的影响
2022-05-11陈晓曹勇黄桥高潘光
陈晓, 曹勇, 黄桥高, 潘光
1.西北工业大学 航海学院, 陕西 西安 710072;2.西北工业大学 无人水下运载技术工信部重点实验室, 陕西 西安 710072
以鸟类和鱼类为代表的飞行生物和水生生物通过拍动翅膀或鳍获取推力和升力,从而可以灵活运动或远距离巡游,这是一种十分普遍的运动形式,其非凡的运动性能使仿生推进以及仿生机器人成为研究的热点[1-2]。
扑翼推进相较于传统推进器具有推进效率高的特点,一直以来大部分对于扑翼运动的研究集中于非自主推进的约束模型,即在给定来流中将翼型固定在原地运动,模拟向前游动[3-5]。这些研究揭示了扑翼运动产生推力的原因是反卡门涡街,但是忽略了翼型自身运动与流体动力之间的耦合,不符合真实生物运动情况,因此近年来自主推进得到越来越多的关注与研究。Vandenberghe等[6]通过实验发现平板翼型做升沉运动时的频率超过临界值则会自发沿水平方向推进,升沉频率和升沉幅值决定了自主推进的速度。Alben等[7]研究发现对称破缺和涡的相互作用是做扑翼运动的物体产生水平位移的原因,这也证明生物体的运动是拍动翅膀或鳍与流体相互作用的结果。Hu等[8]数值模拟了静水中对称椭圆翼型做升沉运动时的自主推进,结果表明原有的对称涡状态被水平方向的自主推进打破,加速最终达到稳态速度并形成反卡门涡街,翼型在水平方向的被动运动不仅与拍动频率有关,还与翼型展弦比和密度比有关。Arora等[9]对静水中做升沉运动的二维平板翼型进行了数值仿真,研究了升沉频率、升沉幅值与密度比对自主推进效率、输入功率以及尾涡的影响,分析了涡与翼型的相互作用对推进速度的影响。Lin等[10]基于浸没边界法研究了NACA0012翼型在静水中分别做纯升沉运动、纯俯仰运动以及升沉俯仰运动的自主推进性能,结果表明升沉运动的自主推进速度以及推进效率高于俯仰运动。
以上自主推进的研究都是基于正弦运动,但是生物体外形、生存环境及习性不同,所以拍动模式多种多样,在以往翼型非自主推进的研究中,可通过控制扑翼运动的波形以提高推力或推进效率。Buren等[11]研究发现翼型做升沉运动时方波得到的推力大于正弦波和三角波。目前对运动轨迹的研究都是基于非自主推进,而自主推进研究较少。Wu等[12]指出自主推进形成的流场完全不同于非自主推进的情况,所以很有必要研究非正弦运动对自主推进的影响。
本文通过对流体动力与扑翼运动的耦合求解,数值模拟翼型非正弦升沉运动的自主推进,研究不同运动波形对自主推进速度、自主推进效率以及流场结构的影响。
1 计算模型与数值计算方法
本文采用弦长为c的NACA0012翼型,研究其在静水中自主推进的问题,设定推力和推进方向沿x轴负方向,如图1a)所示。
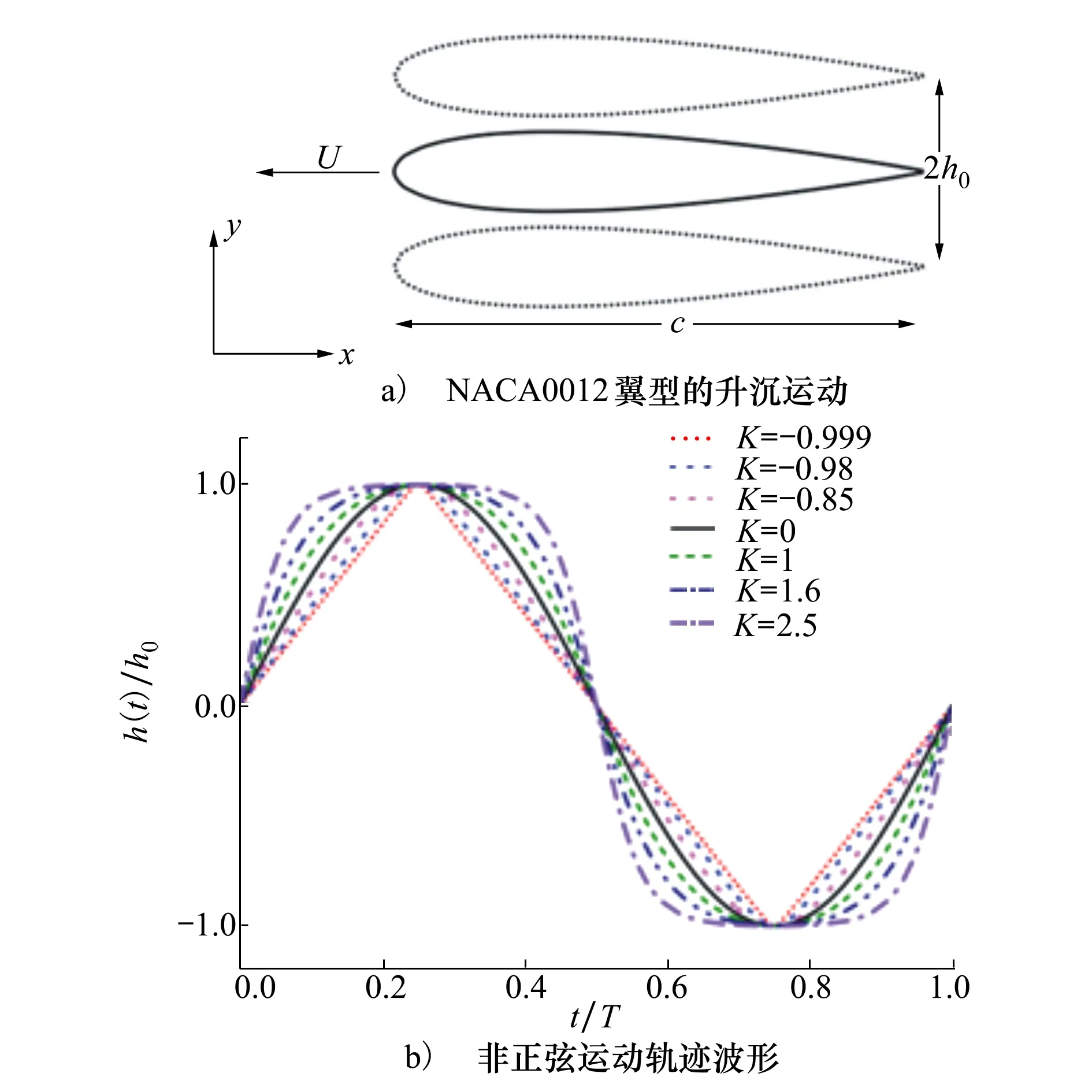
图1 扑翼的自主推进问题
根据Lu所采用的运动学方程[13],定义扑翼非正弦升沉运动方程为
(1)
式中:h(t)为瞬时升沉运动幅值;h0为最大升沉幅值;f为扑动频率;K为波形调节参数,当K增大时,升沉运动波形从三角波(K=-1)变为正弦波(K=0),最终变成方波(K→∞)。本文K取-0.999,-0.98,-0.85,0,1,1.6,2.5,波形变化如图1b)所示。
由于流体与扑翼的相互作用,扑翼通过自身升沉运动可在水平方向上自主推进,根据牛顿第二定律,运动控制方程为

(2)


图2 自主推进计算流程
为了衡量自主推进性能,引入以下参数:
平均推进速度
(3)
平均输入功率
(4)
平均动能
(5)
推进效率
(6)
式中:T是运动周期;Fy是翼型表面流体瞬时作用力的垂直分量;E是巡游时每周期的平均动能,作为输入功[14]。另外为了评估扑翼自主推进时的能量利用率,本文采用速度功率比[15]表示推进单位距离所需要的能量,定义为能量利用率,可表示为

(7)
为了便于比较,文中推进速度、输入功率系数以无量纲形式分别表示为
数值计算中,流体运动的控制方程为二维黏性不可压缩流场中的时间平均连续性方程和雷诺平均Navier-Stokes方程(RANS),可以表示为

(10)
式中:u是流体速度;p是流体压力;ν是流体动力学黏性系数。
本文采用Ansys FLUENT软件以及层流模型进行计算,采用PISO算法对连续方程中的压力和速度进行耦合,动量离散采用二阶迎风格式。翼型升沉运动以及自主推进运动通过用户自定义方程(UDF)实现。

图3 数值计算区域
由于扑翼自主推进的存在,本文采用整体移动的策略,可大大减少网格量。计算域为50c×30c的长方形,翼型前缘距离入口边界15c,如图3所示。整个流域被分为3个区域:翼型置于区域1,采用非结构网格,边界层为结构网格,第一层高度为10-3c,实现升沉运动;区域2为结构网格,动网格方法采用动态铺层,网格只在边界随扑翼运动生成与消失,所以区域1以及两域相接的部分没有网格变化;区域3为结构网格,捕捉尾涡更为精确。这样的设置使计算更稳定,并且可以提高计算效率。
2 计算方法验证
为验证网格无关性,选取3种网格尺寸,其数量为2.7×105,4×105,5×105。图4为f=0.3,h0/c=0.4时,翼型做正弦升沉运动时巡游速度的变化曲线,可以看到网格2与网格3的结果无明显差异,所以后续仿真计算采用网格2。

图4 网格的无关性验证
为验证数值计算方法的准确性,与文献[11]中f=0.15时翼型做纯升沉运动的结果进行对比,如图5所示。在不同升沉幅值下的平均速度和自主推进效率与文献[11]结果基本吻合,故本文的数值计算方法正确有效。

图5 数值计算方法验证
3 数值计算结果与分析
本文主要讨论非正弦升沉运动对扑翼自主推进的影响,由文献[11]中纯升沉运动分析可知:f=0.3时自主推进效率随升沉幅值先增大后减小,在h0/c=0.4处自主推进效率最大;f=0.15时自主推进效率随升沉幅值持续增大,在h0/c=1处自主推进效率最大。因此本文针对以上2种情况分别分析非正弦波形下的自主推进性能以及流场结构。
3.1 自主推进过程中的推进性能
图6表示在f=0.15,h0/c=1(低频)时扑翼从静止起动后加速到巡游的过程中瞬时推进速度U随波形参数K的变化曲线。当速度以一定幅值稳定波动时,认为进入巡游阶段,速度的周期平均值恒定不变,该速度成为巡游速度。由图可以看出,非正弦波形对自主推进运动速度影响很大,K越大即越接近方波,振荡幅值越大。当K=2.5时最大振荡幅值约为0.25;当K=0时以正弦波运动,速度幅值为0.05。另外,起动加速过程受波形影响很大,方波加速最快,K=2.5时约2个运动周期可达到稳态巡游,而正弦波需8个运动周期。图7为加速-巡游过程中的位移变化,可以更加直观地看到在每个运动时刻只有K=-0.85的位移小于正弦波,其余波形的位移均大于正弦波,即同一时间条件下,以方波做升沉运动时翼型“游/飞”得最远。综上可知,在f=0.15,h0/c=1时采取除K=-0.85外的任一非正弦波形都可得到更大的自主推进速度和更高的自主推进位移。

图6 f=0.15,h0/c=1瞬时推进速度
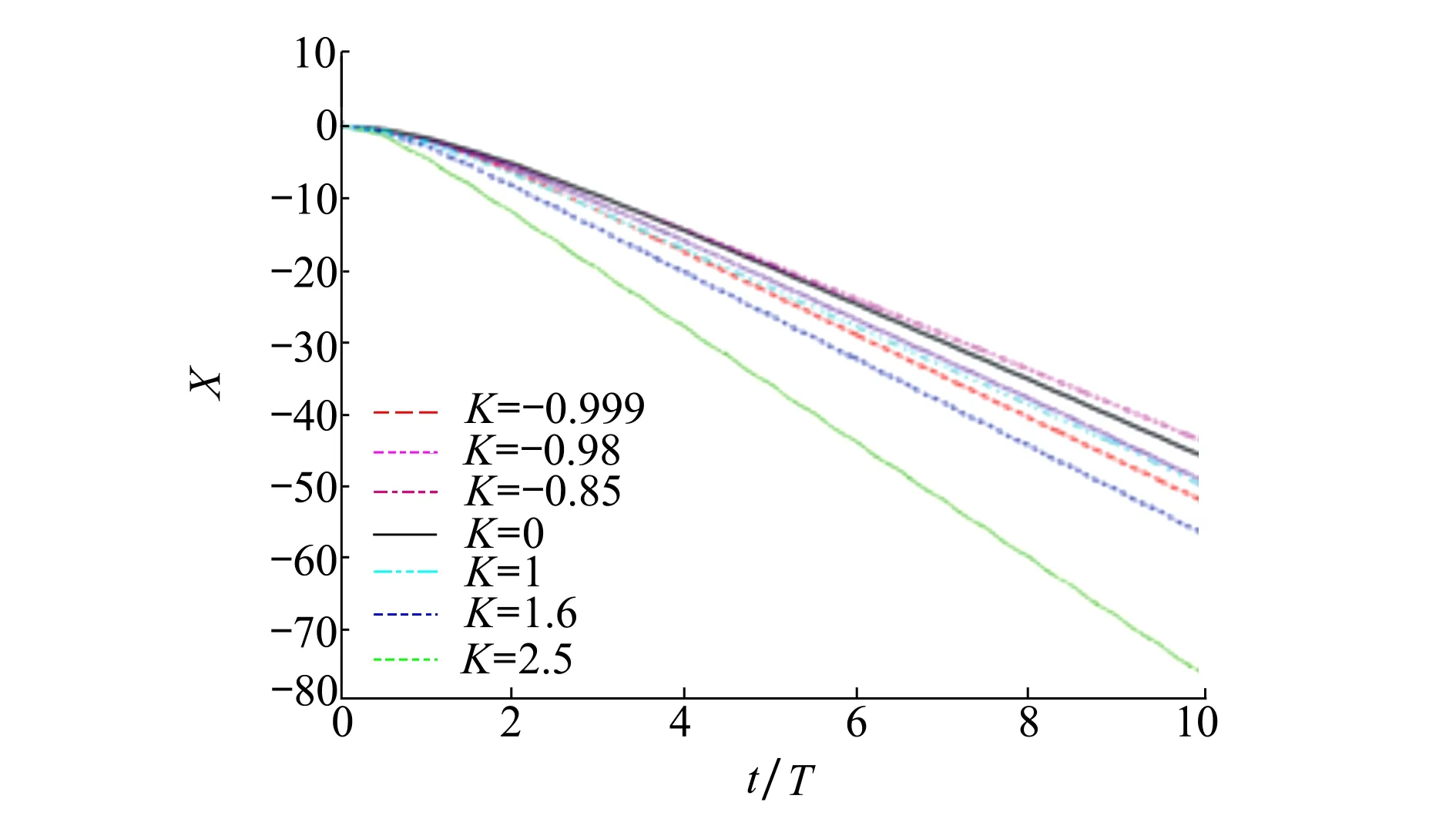
图7 f=0.15,h0/c=1瞬时位移
当f=0.3,h0/c=0.4(高频)时,扑翼从静止起动后加速到巡游的过程中瞬时推进速度U随波形参数K的变化曲线如图8所示。由图可以看出,与低频存在明显差别,K>0时的非正弦波形对自主推进运动速度影响很大,K越大即越接近方波,振荡幅值越大。当K=2.5时最大振荡幅值约为0.1。当K≤0时,非正弦波形对自主推进运动速度大小影响很小,起动加速时间也大致相同。加速-巡游过程中位移变化如图9所示,可以看到当K≤0时每个时刻的位移差别很小。当K>0时运动位移均大于正弦波,即同一时间条件下,三角波与正弦波在整个运动过程中位移大致相同,以方波做升沉运动时翼型“游/飞”得最远。综上可知,在f=0.3,h0/c=0.4时采取K>0时的任一波形都可得到更大的自主推进速度和更高的自主推进位移。

图8 f=0.3,h0/c=0.4瞬时推进速度

图9 f=0.3,h0/c=0.4瞬时位移
3.2 自主推进过程中的效率


图10 f=0.15,h0/c=1平均速度与输入功率
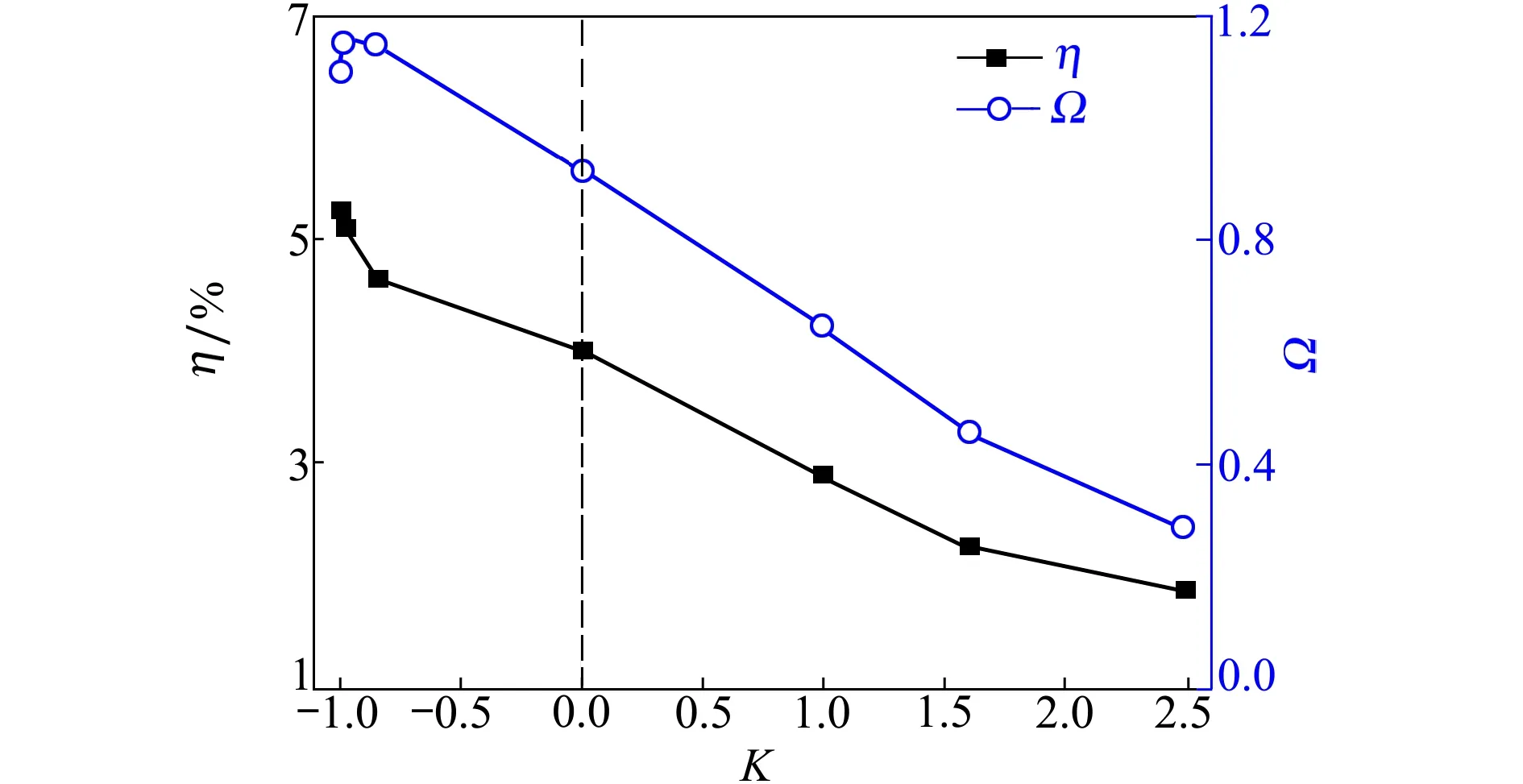
图11 f=0.15,h0/c=1推进效率与能量利用率
当在f=0.3,h0/c=0.4(高频)时,由图12可以看出,K≤0时,K对平均速度以及平均输入功率影响很小;K>0时,K越大则平均速度及平均输入功率越大,在K=2.5时取得平均速度最大值为1.25,相较于正弦波运动的0.75提高了40%。图13表示非正弦波形对自主推进效率与能量利用率的影响。可以看出,随着K的增大,自主推进效率单调递减,在K=-0.999时取得自主推进效率最大值为8.66%,相较于正弦波运动提高了17.3%。随着K的减小,能量利用率逐渐增大,表示翼型在单位输入功下的推进距离更远,或者推进单位距离所需要的能量更少。
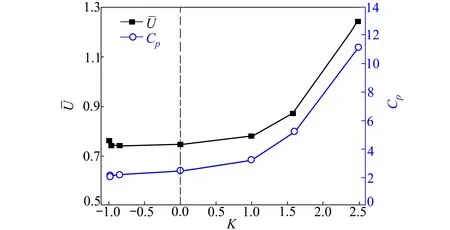
图12 f=0.3,h0/c=0.4平均速度与输入功率
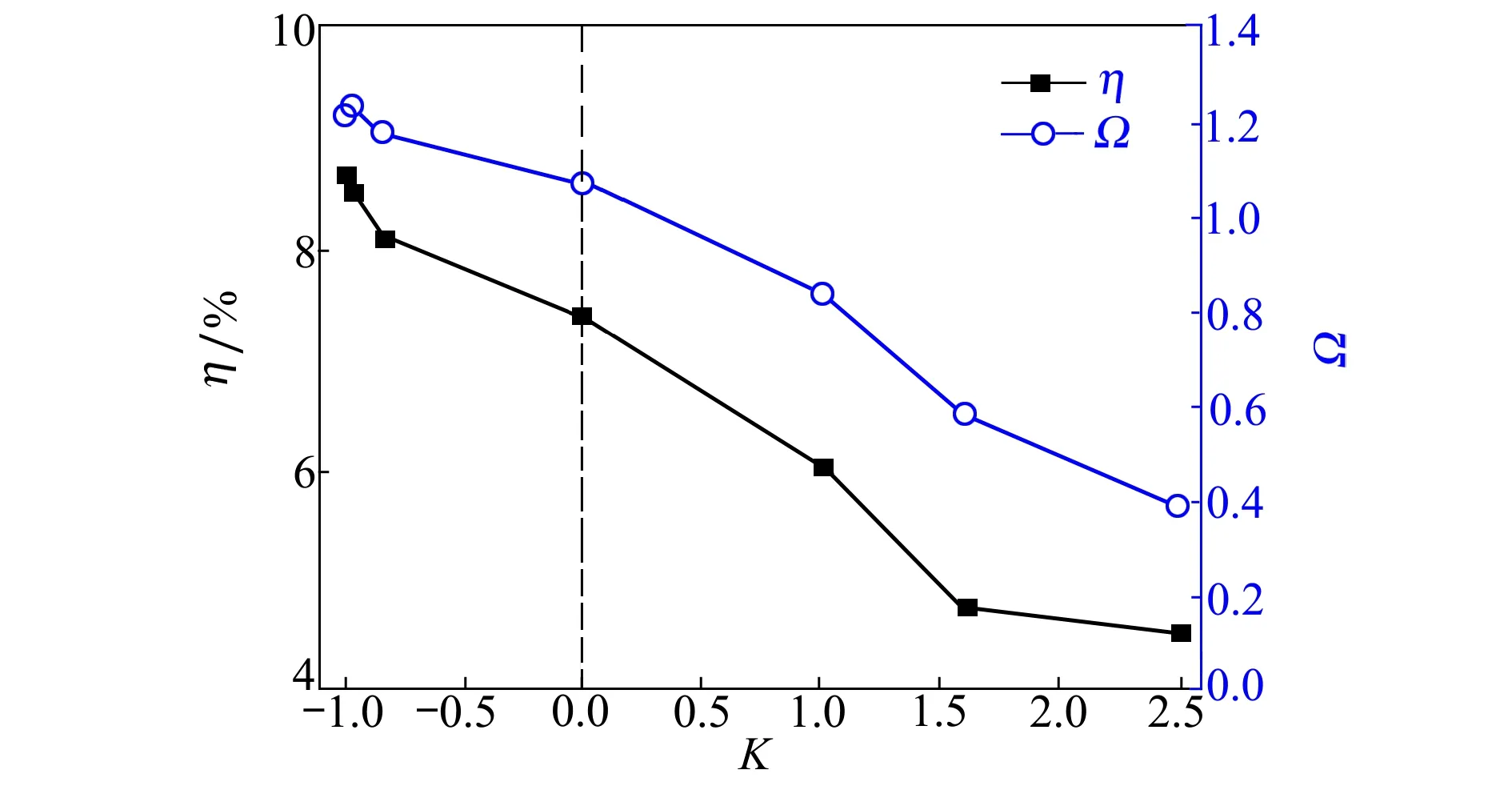
图13 f=0.3,h0/c=0.4推进效率与速度功率比
3.3 自主推进过程中的流场结构
扑翼自主推进达到稳定巡游状态时的流场涡结构如图14所示。非正弦波形对尾涡结构存在非常明显的影响。图14a)为f=0.15,h0/c=1的流场,当K≤0时一个运动周期生成一个正涡与一个负涡,分别上下水平排列形成反卡门涡街,具有较优的运动性能;当K>0时一个运动周期生成两对涡并分别向上向下散开,带来较大的侧向力,造成较大的能量耗散,所以K=2.5的波形对应的推进效率以及能量利用率较低。图14b)为f=0.3,h0/c=0.4的流场,由于游动速度提高,各种波形均形成反卡门涡街,随着K的增大,涡强逐渐增大,故在K=2.5处形成最大自主推进速度。

图14 流场涡结构随波形的变化
4 结 论
本文通过数值模拟耦合求解流体动力学方程与扑翼运动学方程,建立自主推进计算模型,研究了在静水中非正弦升沉运动对扑翼自主推进的影响,讨论了波形参数K对自主推进速度、位移、平均推进速度、平均输入功率、自主推进效率与能量利用率的影响,得到如下结论:
1) 非正弦波形对自主推进运动速度影响很大,K越大即越接近方波,瞬时速度振荡越剧烈,振荡幅值越大,平均速度越大,起动加速过程越快,自主推进的位移越大,以方波做升沉运动时翼型“游/飞”得最远;
2) 波形参数K对自主推进效率影响很大,随着K的增大,自主推进效率不断减小,在K=-0.999时取得自主推进效率最大值,相较于正弦波运动提高了31%;
3)K<0时能量利用率大于正弦波,意味着翼型在单位输入功下的推进距离更远,或者推进单位距离所需要的能量更少;
4) 本研究的结果对仿生水下航行器设计有一定的参考价值,当需要较大的前进速度时可选择较大的波形参数使波形趋近于方波,当注重较大的推进效率与能量利用率时可选择较小的波形参数使波形趋近于三角波。
