基于起飞过程的机载SINS自标定方法*
2022-05-11戴邵武贾临生戴洪德
戴邵武 赵 阳 贾临生 戴洪德
(海军航空大学 烟台 264001)
1 引言
捷联惯导系统作为飞机的主要导航系统,相比于平台式惯导系统,具有体积小、成本低和可靠性高等特点[1]。但是由于惯导直接固连在机体上,使得其同样处于恶劣的飞行环境中,内部参数易发生改变,所以需定期标定机载SINS[2~3],保证其导航精度。
机载SINS的常规标定方法是将其从飞机上拆卸下来,送到专业的实验室,依据高精度转台实现机载SINS的标定,但是这种做法存在标定时间较长、耗费人力物力和影响飞行计划等缺点[4~5]。Gamble等[6]建立9维Kalman滤波器,以速度误差、失准角及加速度计的零偏为状态向量,以静基座发射架进行机动时,INS的速度误差作为观测量,实现了加速度计零偏的估计,但是该方法仅针对低成本多发火箭炮系统的射前加速度计标定。Fong等[7]在不依赖转台的情况下,采用多位置法实现加速度计标定,随后利用运动中加速度计和惯性测量单元定向算法输出结果相比较,实现陀螺仪的标定,虽然无需高精度测量设备,却仍需从载体内部拆卸惯导系统,静置在不同的位置进行测试。陆志东[8]研究了捷联惯导系统的空中标定技术,验证了空中标定的可行性。房建成等[9]研究了基于四元数最优化的机载惯导系统空中标定技术,但只对陀螺仪的误差参数进行了估计。聂子健等[10]提出基于观测量匹配的空中标定技术,但是整个仿真飞行时间较长,在实际飞行过程中,存在卫星导航精度无法保证等问题。
针对上述问题,本文提出基于常规起飞过程的机载SINS自标定,根据SINS/GPS组合导航原理,设计了自标定模型,结合常规起飞过程的机动,以惯导输出与机场跑道附近高精度差分GPS差值作观测量,应用Kalman滤波,实现惯性导航元器件误差参数估计。仿真结果表明,该方法能够实现部分惯导参数的标定,证明了该方法的有效性。
2 惯导系统误差方程
3 自标定误差模型
3.1 状态模型

3.2 量测模型

3.3 Kalman滤波器

4 飞行轨迹设计
现有空中标定方法需要在空中做额外的机动,且导航卫星精度无法保证,本文通过飞机起飞的机动过程,利用跑道附近的高精度差分GPS,实现陀螺仪和加速度计相关误差参数的标定。整个起飞过程由六个阶段组成,如下所示。
1)静止20s。
2)以6.5m/s2的加速度加速12s,速度达到78m/s。
3)速度达到后,以2°/s的俯仰角拉升15s,拉升到30°。
4)保持30°角度爬升30s。
5)以2°/s将飞机改平,持续15s。
6)匀速飞行 100s。
常规起飞过程轨迹仿真图如图1所示,常规起飞过程持续192s。图中,小黑点代表着飞机起始位置。
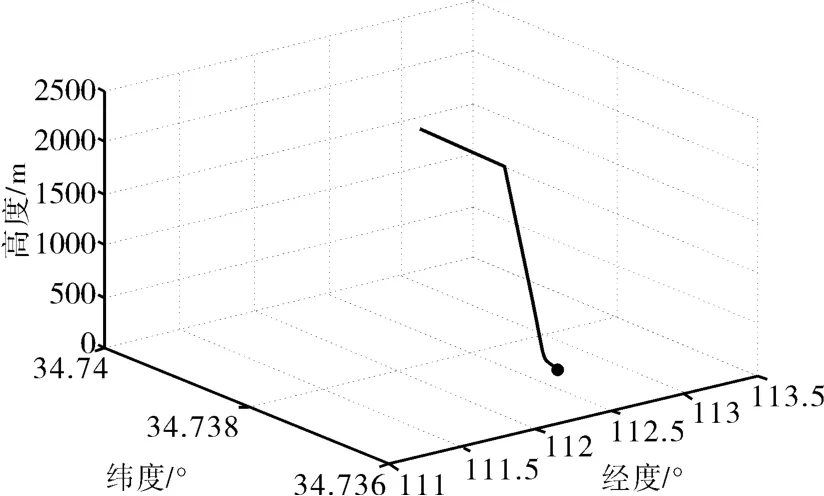
图1 起飞过程轨迹图
5 仿真实验分析
机载SINS误差参数如表1所示。

表1 机载SINS误差参数设定
GPS定位噪声为0.5m,测速噪声为0.1m/s。机载SINS解算周期是0.04s,滤波周期是1s。
Kalman滤波初值设置如下。
初始误差协方差阵为
噪声方差阵为

本文以速度误差为观测量,量测误差方差阵为

仿真结果如图2~3所示,图中“实线”代表仿真误差曲线,“虚线”代表待标定误差参数值。
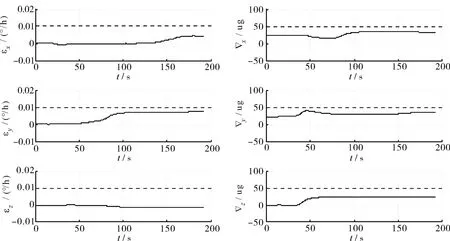
图2 陀螺仪和加速度计零偏误差估计曲线
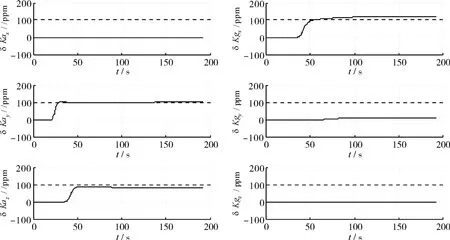
图3 陀螺仪和加速度计标度因数误差估计曲线
由图2和图3知,陀螺仪Y轴常值漂移激励效果较好,Χ轴部分误差被激励出,Z轴激励效果较差;加速度计整体激励效果一般,Χ,Y轴激励效果稍好于Z轴。δKay,δKaz,δKgx在起飞过程激励效果较好,能够达到预期要求。本文所提方法可以实现部分惯导参数的标定,但是也存在一部分参数激励效果不完全或者没有激励效果。
6 结语
由于现有文献介绍的空中标定方法中卫星导航精度和稳定性难以满足要求,本文提出了基于飞行过程的机载SINS自标定方法,结合常规起飞过程的机动,以机场跑道附近的高精度差分GPS输出值和惯导解算速度差值作观测量,采用Kalman滤波实现惯导参数的估计,仿真结果证明了该方法的有效性。考虑下一步机载SINS自标定研究时,增加二次爬升机动从而更好地激励陀螺仪常值漂移;增加部分空中的机动效果,实现惯导的全参数标定。
