无人机免像控摄影测量技术在西北地区干涸河道治理中的应用
2022-05-10任智龙李风贤柴生亮李伟伟
任智龙 李风贤 柴生亮 李伟伟
(兰州资源环境职业技术大学,甘肃 兰州 730000)
近年来,随着国民环保意识的不断提高,河道生态保护备受各方关注[2]。十九大精神指出“节水优先、空间均衡、系统治理、两手发力”的治水思路,为区域河道治理工作提供了科学指南和根本遵循[3]。西北地区气候干燥,水资源匮乏,干涸河道占比较大。干涸河道生态环境问题严重,由于河道常年没水或者少水,经常会出现向河道倾倒垃圾、排放生活污水、甚至在河道乱采乱挖的现象,造成河堤失稳,河道周边环境恶化。西北地区干涸河道的治理迫在眉睫,只有通过河道治理逐渐恢复河道功能,才能实现河道资源的有效利用,促进区域生态的良好发张,河道治理工作关系民生,意义重大[4]。
河道治理测量工作中,传统的测量技术主要存在以下问题:一是传统RTK 测量技术,该技术是利用GNSS的RTK 测量模式进行碎部点数据采集,该技术在开展过程中需要建立移动站和CORS 基站或移动站与基准站之间的信号传递,信号传递质量的好坏直接影响测量成果的好坏,而且测量从业人员的工作量大,效率低,严重影响了河道治理工作的开展。二是传统无人机摄影测量技术,为满足测量精度的要求,利用传统无人机摄影测量技术进行测量工作时需要布设像控点,然而西北地址构造以黄土为主,河道主要以疏松黄土为主,该介质中像控点的布设和测量难度较大。
随着无人机摄影测量技术的快速发展,无人机免像控摄影测量技术在地形图测绘、数字三维实景模型建设等方面的优势不断凸显[5],无人机免像控摄影测量技术在河道测量工作中的运用能很好的解决传统河道测量技术的不足,为河道治理工作提供更高效精确的数据基础,提升河道治理工作的效率。
本文以兰州市榆中县某河道治理工作为例,借助飞马智能航测系统D200 为研究对象,基于无人机免像控摄影测量技术开展了河道三维模型建设、河道地形图测绘[6],河道线路纵横断面图绘制等工作,分析了无人机摄影测量技术的测量精度,阐述了无人机摄影测量技术在河道治理工程中运用的方法和流程。
1 高精度免像控航测系统
飞马智能航测系统D200 是一款基于高性能旋翼平台的一体化高精度航测无人机系统。D200 无人机的载重量为1kg,单次飞行的时长最高可达到40 分钟,飞机的飞行安全可靠性高。本次项目中飞马智能航测系统D200配备搭载两轴增稳云台的五镜头倾斜摄影相机。
1.1 PPK/RTK 融合差分免像控技术
本次项目中运用PPK、RTK 融合差分技术进行免像控作业,无人机飞行时同时获取RTK 实时差分信号和PPK 后处理差分信号,在数据处理时对基站数据和机载POS 数据进行联合差分解算,可得到稳定的高精度的融合差分POS 数据,从而有效的提高了空三数据定向的精度。PPK/RTK 融合差分技术可有效的提高无人机免像控测图精度,可达到1:500 比例尺测图精度要求。
1.2 高精度多功能数据获取系统
无人机航线规划软件,可根据任务区域的地形起伏和影像要求,基于高精度实景三维地形自动生成满足后期处理的最佳飞行方案和航线,能够在航线角度调整飞行后任然能满足后期接边需求;适配传感器应用模式需求,基于高精度三维模型的地形贴合自动航线算法,生成精准地形跟随飞行方案和航线,保证获取数据的全航程一致性。
1.3 一体化智能数据处理系统
“无人机管家”专业数据处理软件,能够满足POS 数据解算、像控点量测、快速图形拼接、数字正射影像生产、数字地表模型生产、真正射影像生产、数字高程模型制作等多种成果需求。
2 工程实施
无人机免像控摄影测量施测技术流程如图1 所示,首先利用无人机摄影测量系统完成摄影测量数据采集,然后利用数据处理软件进行数据处理并完成数字高程模型(DOM)、数字地表模型(DSM)、数字正射影像(DEM)数字产品生产,第三基于以上的数字产品,利用专业测图软件进行二次加工,实现地形图、线路纵横断面图等的绘制工作。
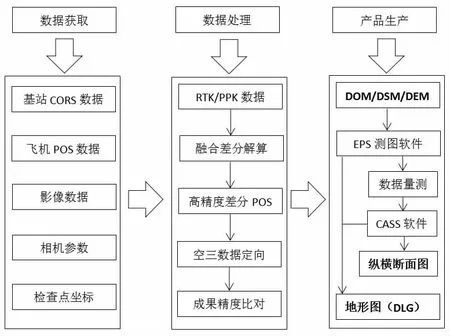
图1 技术流程图
2.1 测区概况
该测区是兰州市榆中县某河道治理工程中的一段,河道地处西北黄土高原,属于典型的山区干涸河道,河道中存在垃圾倾倒、污水排放、河堤破坏等现象。测区段地形复杂,沟壑比较多,地势较为平缓,平均海拔约2100米,测区长度约10 公里,宽度沿河道中心向两侧延伸约1 公里。测区在偏远山区,手机信号弱,GPS 信号弱,易发生塌方,通视难度大。河道底部及周围为松动型黄土,像控点布设难度大。
2.2 数据采集
该工程中无人机摄影测量工作数据采集主要由影像数据和检查点坐标数据采集两部分[7]。数据采集之前首先要进行现场踏勘,现场踏勘的内容主要有以下几个方面:根据任务区域情况及无人机性能确定最优飞行计划;观察现场天气情况,确定最佳飞行时间;量测飞行范围内高大建筑物、高大树木的高度,确定无人机飞行高度;选择合适的起飞、降落点,以便提高电池的利用率;无人机RTK 基站架设位置选择,基站架设位置要考虑周围视野的开阔性,确保基站信号的传递质量;选取检查点布设位置,检查点位置的选取要考虑检查点测量的可实施性。
2.2.1 影像数据采集
本次数据采集采用飞马智能航测系统D200。根据现场踏勘的资料完成无人机的装配、无人机基站的架设、相机检查等工作后便可进行测区影像数据采集。影像数据采集的重点在无人机飞行航线的规划设计(图2),航线规划的好坏对影像采集的效率和影像质量有直接的影响,此次任务采用无人机防地飞行的方式采集数据,共设计了4 条航线,飞行高度155 米,航向重叠度80%,旁向重叠度60%,像素2.0 厘米。
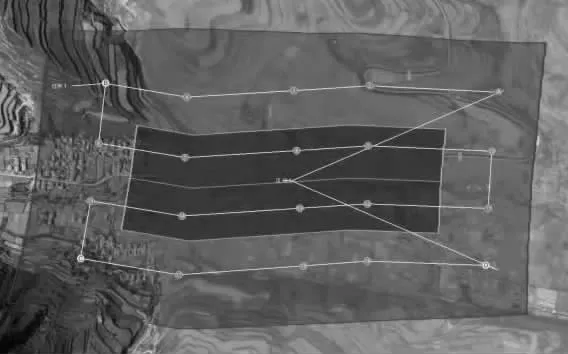
图2 航线规划图
2.2.2 检查点坐标采集
此次任务为了验证无人机免像控摄影测量的精度,在无人机影像数据采集之前布设了检查点,检查点分布在测区地形特征发生变化的位置,以提高无人机免像控摄影测量精度验证准确度。此次共布设了30 个检查点,检查点坐标的量测采用RTK 技术实施,测量前对无人机基站点坐标进行检校,保证了无人机影像POS 和检查点坐标在同一坐标系统。
2.3 数据处理
数据处理采用的是飞马“无人机管家”一体化智能数据处理系统。数据处理的主要内容有检查原始影像质量,进行POS 融合差分解算,坐标的转换工作,空中三角测量定向,以及DOM、DSM、DEM、实景三维模型等测量成果的生产,此次数据处理生产的成果同时也是后期测量成果的基础资料,见图3。
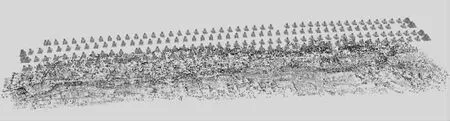
图3 空三定向
在数据处理环节需要注意以下几个方面:原始数据质量检查,分别从检查影像像素点、像素点的匹配程度、匹配点的平均高程、成图比例尺、成图分辨率、影像航向重叠度、旁向重叠度等多个角度检查数据质量,作为航飞质量评价的可靠依据;相机检校及畸变去除,利用基于地面检校场模型约束的相机检校方法,检校并输出更加稳定准确的最优相机模型,保证后期空三解算和测图精度要求;PPK 和RTK 融合差分解算,取得高精度的差分POS 数据;参数计算与坐标转换,测量成果坐标要符合项目要求的坐标系统,目前常用的坐标系统有北京54 坐标系、西安80 坐标系、CGCS2000 国家坐标系[8],而高精度融合差分POS 数据是以大地坐标系(经度,纬度,高程)的形式呈现的,这就需要利用四参数或七参数对坐标系统进行转换,以满足航测生产成果需求。
3 精度分析
将检查点坐标以(东坐标x,北坐标y,高程h)的格式导入数据处理软件,完成检查点在航测影像上的刺点工作,通过无控控制网空三计算实现检查点在数字正射影像中坐标的量测,并与检查点RTK 测量坐标值进行比对,计算出各检查点的测量误差值,检查点的东坐标x、北坐标y、高程h的测量误差值分别用Δx、Δy、Δh 表示,平面误差用Δs表示(表1)。
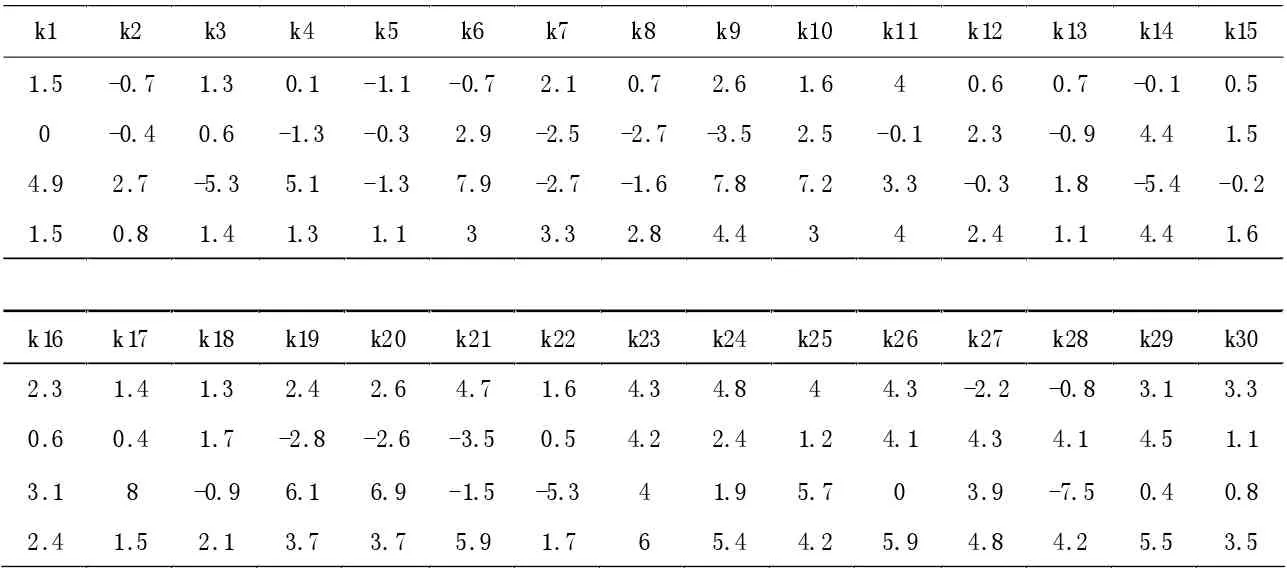
表1 DOM 测量坐标与RTK 测量坐标较差 cm
检查点坐标的中误差为:

式中,Δ 为检查点误差值,n 为检查点个数。
由表1 可知Δx 的最大值为4.8cm,中误差mx 为±2.5cm;Δy 的最大值为4.5cm,中误差my 为±2.6cm;Δs的最大值为5.9cm,平面中误差ms 为±3.6cm;Δh 的最大值为8.0cm,高程中误差ms 为±4.6cm。检查点平面精度和高程精度均能够满足《数字摄影测量空中三角测量规范》[9]中丘陵地带1:500 比例尺测图的要求。
4 河道图形测绘
为满足河道治理工作的需要,在利用无人机摄影测量技术完成河道数据的采集工作后,需要基于高精度的摄影测量成果完成河道地形测绘工作,河道图形测绘的主要成果有河道带状地形图、河道纵断面图、河道横断面图。河道图测绘内容包括绘图数据的获取和图形的绘制两部分。主要技术流程如下,首先将河道实景三维模型或数字正射影像导入EPS 测图软件,在EPS 中完成河道纵横断面绘制所需的点位坐标的采集,然后将采集好的坐标数据导入CASS 图形绘制软件进行绘图工作。其中河道大比例尺地形图的测绘可以直接利用EPS 软件完成,大比例尺地形图测绘是EPS 的主要模块之一,EPS可以直接进行地貌、地物的采集工作。利用实景三维模型进行图形立体测量工作,降低了传统测图外业数据获取的难度,解决了应地形环境等因素影响人无法到达的测量技术难题。EPS 数据采集流程主要包括数据转换、数据加载、数据采集、数据检查、数据修改、数据输出。
河道地形图绘制内容包括河道地形以及河道周边地貌、地物元素,本次测量的河道是干涸河道,不涉及水下地形的测量。此次地形图测绘的测图比例尺为1:1000,图形成果满足1:1000 测图比例尺精度要求,河道地形图如图4 所示。
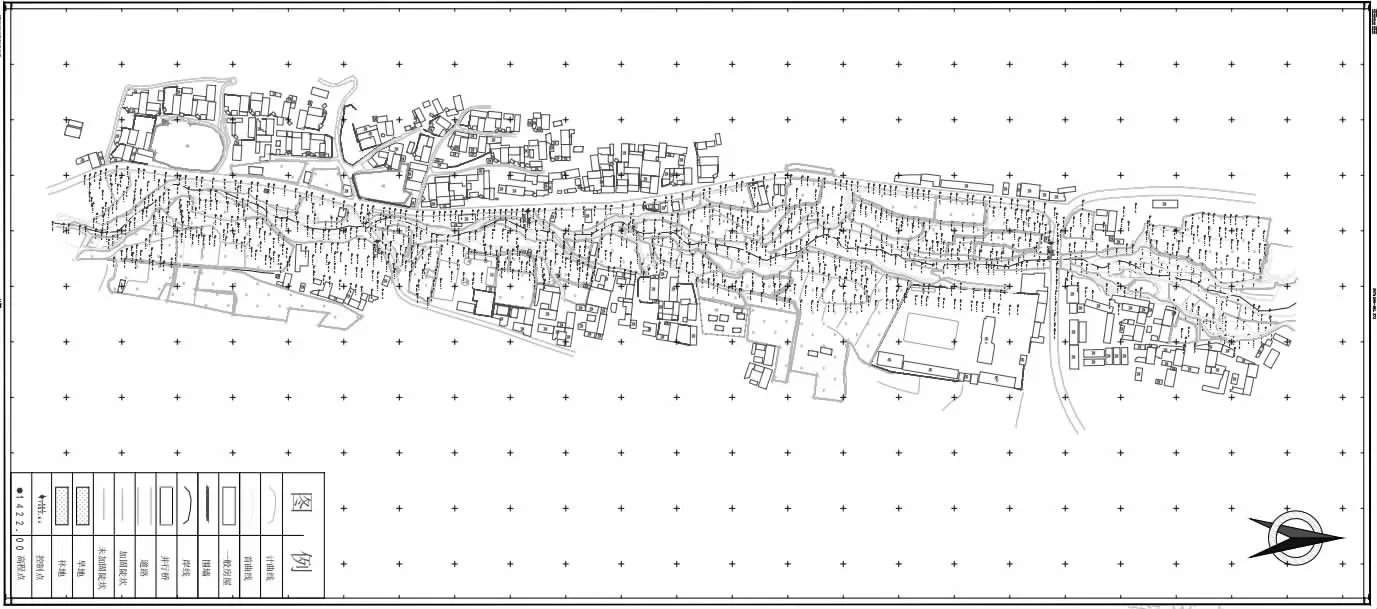
图4 河道地形图示意
河道纵横断面图绘制,河道断面图在河道治理、设计工作中是比较重要的图纸,要求的精度比较高,数据量测时需要特别注意以下几个方面的内容:地形变化较大的位置、河道转弯的位置必须设置横断面;横断面测量时需要提前设定好测量桩号设计好桩点位置和装点里程;横断面应从岸顶向外延伸30 米左右(图5);河道纵断面图沿着河道的中心线做河道的坡面,以河道的里程为x 轴,以河底的高程为y 轴建立的河道中心坡度及落差的走势图(图6)。
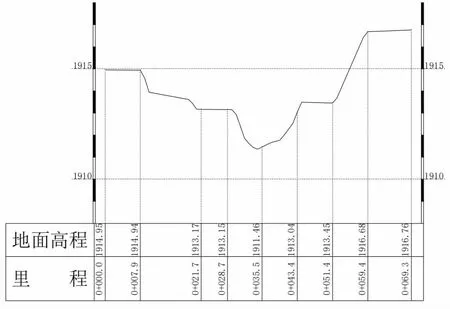
图5 河道横断面示意图图
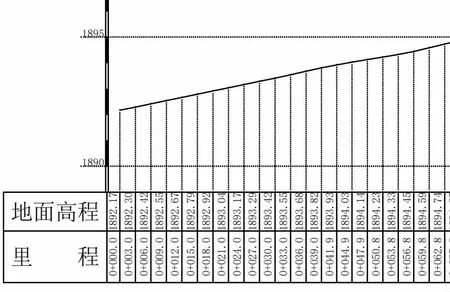
图6 河道纵断面局部示意图
5 结论
目前,在河道治理测量工作中传统测量技术主要存在以下两个问题,一是传统RTK 测量技术需要设备之间传递信号和测区有良好的通讯条件,受测区通讯信号的好坏和信号传递距离的限制严重;二是传统摄影测量技术需要利用控制点对影像测量成果进行纠正,受像控点布设要求的限制严重。以飞马无人机摄影测量系统D200研究对象,基于PPK 和RTK 融合差分技术的无人机免像控摄影测量技术很好的解决了传统技术存在的问题。
结合无人机免像控摄影测量技术的迅速发展,以西北地区干涸河道实际项目为例,验证了无人机免像控摄影测量技术使用与河道治理测量工作中的可行性,该技术能够满足1:500 比例尺测图精度的要求。
详细的介绍了无人机免像控技术运用于河道地形图、河道纵横断面图、河道数字实景三维模型测绘的详细操作流程。后续,我将持续深入研究,推进无人机摄影测量技术在河道检测、河道生态保护等多个领域的应用,为从事河道工程、测绘工程等相关工作及研究的人员提供参考,为区域经济的发展贡献力量。
