基于PPP-GPS/IMU紧组合的列车定位方法
2022-05-10刘梦杨蔡伯根
姜 维,刘梦杨,蔡伯根,王 剑,刘 丹
(1.北京交通大学 电子信息工程学院, 北京 100044;2.北京交通大学 轨道交通控制与安全国家重点实验室,北京 100044;3.北京市电磁兼容与卫星导航工程技术研究中心, 北京 100044)
在列车运行控制系统中,列车定位占据着重要的地位,为保障列车行车安全、提高运输效率,由全球卫星导航系统(Global Navigation Satellite System, GNSS)和惯性导航系统(Inertial Navigation System, INS)构成的组合导航系统已经成为下一代列车定位技术的主要发展方向之一[1]。
惯性测量单元(Inertial Measurement Unit ,IMU)是INS的重要组成部分,由三个正交陀螺仪和三个正交加速度计组成。IMU的定位误差会随时间不断增加,与GNSS组合可以有效减小这种累计误差,同样地,短时间内高精度的IMU定位结果也有助于GNSS的动态定位。IMU/GPS组合导航的方式可以分为松组合、紧组合和深组合三种。GPS接收机由许多部分组成,卫星传来的信号要在其中经过多次传递转化才是最终输出的位置信息。直接将位置信息和速度信息作为卡尔曼滤波中的测量值的是松组合,将伪距等接收机原始信息作为测量值则是紧组合。本文采用的是紧组合的方式,相对于松组合,紧组合所使用的观测值精度更高,并且受可观测卫星数量的影响较小,在可观测卫星颗数小于4的情况下,仍然能输出组合定位的结果,增强列车定位的连续性。
为增加定位精度,减少对轨旁设施的依赖,从GPS定位数据获取方面,一方面选择卫星轨道误差和钟差更小的精密星历替代广播星历;另一方面对星历数据和接收机接收到的原始观测值进行误差修正,可采用精密单点定位来满足这两方面需求。
精密单点定位 (Precise Point Positioning, PPP) 是采用国际GNSS服务组织(International GNSS Services,IGS)免费公开提供的精密星历和钟差,对信号从卫星至接收机遇到的各种误差进行模型搭建与校正,利用载波相位观测值实现单机绝对定位的方法。和差分定位相比,PPP只需单台双频GNSS接收机,在全球范围内的静态精度就能达到毫米级到厘米级,动态精度达到厘米级到分米级[2]。
在铁路应用方面,与传统差分定位相比,PPP减少了基于GNSS的列车定位系统对基站的依赖,节约铁路基础设施建设维护成本,而且运用提前1.5 h发布的超快速精密星历产品,使其定位结果误差达到列车定位的标准[3],文献[4]针对列控中的需求及应用,研究PPP技术在列车定位中的应用方案,保障列车定位的安全性和可用性。文献[5]在列车定位领域中引入广域实时PPP技术,着重探究定位的收敛性和连续性,但没有提及PPP组合定位,可见PPP在铁路定位的应用前景愈发值得探索。
与伪距定位相比,载波相位波长小,定位精度更高,可达厘米级[6]。在PPP和IMU紧组合中,将用PPP误差模型修正后的载波相位和伪距率作为观测值,把模糊度浮点解作为卡尔曼滤波中状态估计矢量的一部分在每一历元进行估计,减少失锁和周跳带来的影响[7]。另外,以高度角大小为依据选择参考卫星,将其他卫星观测值与参考卫星观测值相减来减少接收机相关误差。
已有学者将PPP技术和IMU组合起来,发挥两者的优势,得到高精度定位结果。不同学者在进行PPP和IMU组合实验时得到的定位结果不同,这主要是因实验仪器、观测条件、解算过程和处理策略存在差异[7]。
文献[9]采用多通道滤波处理,对数据按向前、向后和再次向前的顺序滤波三次,通过多组机载实验,验证PPP和IMU紧组合的定位精度可达到分米级。文献[10]针对城市环境下汽车定位问题,提出在非完整性约束和零速度更新基础上的PPP/IMU紧组合,东、北、天三方向上的RMS分别为0.62、0.72、 0.66 m。文献[11]使用多星座GNSS提高PPP/IMU组合系统对环境的适应性,在不同可观测卫星数和IMU级别下探究系统定位结果。结果表明,定位误差不大于0.5 m,在GNSS卫星失锁后再次被探测时紧组合比松组合的收敛速度更快,失锁期间抑制发散的效果更好,更高级别的IMU也有利于系统输出姿态的精度。
PPP/IMU组合已被应用于不同场合的研究。文献[12]研究在2D速度条件约束下PPP/MEMS-IMU算法,实验验证表明在2D速度条件约束下,定位结果的姿态精度得到改善。在航空摄影测量中,文献[13]比较PPP/IMU和DGNSS/IMU两种组合方法的位置结果后,发现二者存在约0.3 m的系统性偏差。
为提供连续准确的列车定位结果,节省轨旁设备建设维护成本,提出了PPP-GPS/IMU紧组合定位系统。其中,将GPS原始观测,即载波相位以及伪距率作为量测与IMU进行紧组合。采用星间单差消除电离层组合观测值来有效减少接收机相关误差。把载波相位模糊度作为状态向量的一部分估计浮点解,以减少卫星信号失锁和周跳造成的影响。利用扩展卡尔曼滤波器估计列车运动状态,降低惯性导航系统的累计误差,提高组合定位结果输出频率和在可观测卫星数频繁变化下的稳定性,增加列车定位结果的多样性、连续性和有效性。
1 精密单点定位
精密单点定位是利用从IGS网站上下载的精密卫星星历和钟差,对GNSS信号传播至接收机途中遇到的各种可能的误差进行修正后,利用单台双频接收机实现绝对定位的方法。
1.1 精密单点定位步骤
精密单点定位主要流程包括从放置在列车上的GNSS接收机中获取卫星原始观测数据文件,得到不同时刻对应的卫星观测值,如伪距、载波相位等。同时,使用IGS精密卫星产品,得到精密卫星轨道和卫星钟差数据,对卫星位置、速度和钟差插值计算得到所需历元。然后,对电离层延迟、相对论效应等误差根据修正模型进行误差补偿。最后,把误差补偿后的卫星观测值、卫星位置等信息用于最优估计算法中,计算得到列车运动状态信息。
1.2 精密星历和钟差
精密星历和钟差可从IGS网站中下载,其中最终精密星历是精密星历中发布时间最久、精确度最高的星历。卫星轨道精度可达2.5 cm,采样时间15 min,卫星钟差精度75 ps RMS,采样时间5 min或30 s,延迟12~18 d。
1.3 主要误差及修正模型
精密单点定位需要对定位测量时所有可能存在的误差进行分析,提高解算结果精度。有三类影响GNSS定位结果的主要误差源:①和卫星相关的误差,来自卫星器件或相关数据;②信号传播路径中发生的误差;③和接收机相关的误差,包括接收机钟差、接收机天线相位中心改变等。
1.3.1 卫星相关误差源
(1)卫星星历误差
卫星星历给出的卫星位置和速度并非真正的卫星位置与速度,两者之间的误差属于GNSS定位误差中的系统误差。最终精密星历是IGS中包含观测卫星的三维位置和速度坐标,历元之间的时间差是15 min。在精密单点定位计算中,可对精密星历历元内插得到所需历元。
(2) 钟差
卫星时钟与标准GPS时间之间由于时钟频率漂移的存在难以完全同步。在精密单点定位中,可对从IGS中下载的钟差产品数据进行内插计算,得到更高频率的钟差数据,满足不同用户的需求。
(3)天线相位中心改正
精密星历中给出的卫星位置并非卫星天线相位中心的位置,并且中心位置并不固定,给精密单点定位的定位结果带来误差。这种误差可以借助文件ANTEX中记载的修正量进行校正,得到更加准确的卫星天线相位中心位置[14]。
(4)相对论效应
相对论效应产生自卫星与接收机在所受重力和速度上的差异,用户需要校正的部分为[15]
( 1 )
式中:rela为卫星和接收机的相对论效应;r为卫星位置;v为卫星速度;c为光速。
1.3.2 传播路径相关误差源
(1)电离层误差
位于地面 60 km以上的大气层被称为电离层,电离层中的电磁波能延长GNSS信号的传播时间,增加GNSS信号的传播距离。
消除电离层组合(Ionosphere-Free Combination,IF)观测值能有效减少电离层误差带来的影响,需要双频信号来构建,可写为
( 2 )
式中:f1、f2为GNSS信号频率;A1、A2分别为频率f1和f2的接收机观测值;A3为消电离层组合观测值。
(2)对流层误差
从地面到40 km的大气层是对流层。对流层延迟是精密单点定位中的主要误差之一,对流层中GNSS信号传播速度与信号频率无关,与电离层误差相同,采用双频信号构建组合观测值的方法并不适用,所以采用误差模型校正。对流层延迟的大小和卫星高度角有关,对定位经度的影响可达2.3~20 m。
对流层延迟可分为由干燥气体引起的干分量延迟和由湿润气体引起的湿分量延迟,可写为天顶方向的对流层延迟量和投影函数的乘积
dtrop=dzptMdry(θ)+dzpwMwet(θ)
( 3 )
式中:dtrop为对流层总延迟;dzpt和dzpw分别为对流层干分量延迟和对流层湿分量延迟;Mdry(θ)和Mwet(θ)分别为对流层干分量延迟投影函数和对流层湿分量延迟投影函数;θ为高度角。
在对流层延迟中,干分量延迟占大多数,可通过误差模型减小误差得到厘米级甚至毫米级精度;湿分量延迟无法通过误差模型得到有效校正,可将其作为未知量进行估算。在精密单点定位中,通常采用合适的投影函数,把天顶对流层延迟投影到任意高度上,如易于实现、对低高度角敏感的全球投影函数(GMF)[16]。
(3)多径效应
GNSS信号可能会在地球表面及物体上发生反射,直接到达GNSS接收机的信号能和反射后的信号发生干涉,产生多路径误差。采用抑制多径效应的天线和在开阔环境下进行信号接收都可以减少多径效应带来的干扰。
1.3.3 接收机相关误差源
(1)地球自转改正
由于地球自转现象,GNSS信号发射和到达GNSS接收机时的卫星位置是不一样的,两个卫星坐标之间的转换关系为[6]
( 4 )
(2)钟差
与卫星一样,接收机内也存在接收机钟差。在精密单点定位中,接收机钟差可当作未知参数进行估计,或者采用星间单差的方式消除。
(3)天线相位中心改正
GNSS接收机记录的天线相位中心是前端放大器底盘的中心,但真正天线相位中心的位置不是固定的,会受输入信号的影响,带来数毫米至数厘米的误差。若使用的是同一根天线,星间差分能减小接收机天线相位偏移带来的偏差。
1.4 载波相位函数模型
载波相位观测值是GNSS接收机的本地参考信号在接收时刻和在卫星发射时刻的相位之差。与伪距观测量相比,载波频率高、波长短,测量精度相对会高2~3个数量级。
精密单点定位中,载波相位观测方程可以表示为
( 5 )
式中:i为卫星编号;φ为接收机载波相位测量值;ρ为接收机到卫星的真实距离;dion、dtrop分别为卫星信号的电离层延迟和对流层延迟;dti为卫星i钟差;dtr为接收机钟差;N为载波相位模糊度;λ为载波相位的波长;εφ为未模型化的误差。
使用消除电离层组合近似消除电离层延迟,式( 5 )可改写为

( 6 )
将消除电离层组合载波相位观测值相减,减少与接收机有关的误差项,再挑选高度角最大的卫星m为参考卫星,将其他卫星i的单差载波相位观测值与其相减,可得
(7)
同一时刻,选取一颗卫星当作主星,记为m;其他相对普通的卫星记作i;在算法中,其他卫星的载波相位会减去主星的载波相位,这个单差后的载波相位表示为im。
2 PPP-GPS/IMU紧组合
在GPS和IMU松组合中,作为测量值的是位置和速度,但是当可观测卫星数小于4颗时,GPS无法得到位置信息,也就是说,松组合系统在可观测卫星数小于4时无法工作。与松组合不同是紧组合里IMU输出的位置和速度结果会被转化为伪距和伪距率,与GPS处获取的伪距和伪距率做差得到卡尔曼滤波中的测量值,所以紧组合系统在卫星颗数小于4的情况下仍然能输出定位结果。
本文采用接收机原始信息载波相位和伪距率最为卡尔曼滤波中的量测值,并根据前述有关精密单点定位和惯性传感器递推的知识,构建PPP-GPS/IMU紧组合定位系统。
2.1 IMU递推更新
惯性测量单元由三个正交陀螺仪和三个正交加速度计组成,分别用于测量车辆或平台的比力和角速率,已知上一时刻位置、速度和姿态后,可递推出下一时刻位置、速度和姿态。
陀螺仪测量值可用于姿态更新,选用四元数作为姿态描述,更新式为[16]
( 8 )

加速度计测量值可以从载体坐标系变换到导航坐标系,然后用于更新位置和速度
(9)
(10)

2.2 PPP-GPS/IMU系统模型
卡尔曼滤波的系统状态方程[17]为
X(k)=F(k-1)X(k-1)+ω(k-1)
(11)
式中:X(k)为系统状态向量,这里估计的是各个需要最后估计对象的误差;F(k-1)为系统矩阵;ω(k-1)~N(0,Q)为系统的过程噪声。
定义系统状态向量为
X(k)=[δpNδpEδpUδvNδvEδvDδφNδφE

(12)

系统矩阵F(k)为
(13)

2.3 杆臂校正
在实际实验中,惯导和GPS天线安装在不同的位置。因此,在融合GPS和IMU之前,要考虑GPS天线与IMU之间的杆臂[19]。
GPS、IMU和杆臂之间的位置关系为
(14)

2.4 PPP-GPS/IMU量测模型
卡尔曼滤波的观测系统方程表征了观测量和状态之间的关系[17]
Z(k)=H(k)X(k)+υ(k)
(15)
式中:Z(k)为观测向量;H(k)为观测矩阵;X(k)为状态向量;υ(k)~N(0,R)为观测噪声。
系统的观测向量为

(16)

(17)
式中:e为卫星与用户速度差沿视线方向单位矢量投影;vi为卫星i的速度;vI为惯导递推的速度;vm为卫星m的速度;ddtim为卫星钟漂,对流层延迟短时间内可以忽略。
(18)
(19)
其中,(xi,yi,zi)为卫星i的位置;(xI,yI,zI)为惯导递推得到的位置。
对应的,系统的量测矩阵可写为
(20)

因为量测系统中对载波相位和伪距率都进行了星间单差的操作,所以测量噪声协方差矩阵的载波相位或伪距率RΔ*部分写为[1]
(21)

(22)

2.5 PPP-GPS/IMU紧组合滤波流程
对于PPP-GPS/IMU紧组合,精密单点定位技术运用于观测值和卫星数据的处理中,以单差消除电离层组合载波相位和伪距率作为量测值,实现PPP-GPS和IMU的紧组合,以适应可观测卫星颗数小于4的环境,校正惯性系统累计误差,得到精度和频率更高的连续定位结果。
式(23)~式(27)为时刻k的卡尔曼滤波公式,式(23)和式(24)表述的是卡尔曼滤波的时间更新过程,得到下一时刻状态估计和状态协方差矩阵P。

(23)
P(k|k-1)=F(k-1)P(k-1)FT(k-1)+Q(k-1)
(24)
式(25)~式(27)描述了卡尔曼滤波的量测更新过程,首先计算增益矩阵K,然后结合观测新息更新状态估计和状态协方差矩阵。
K(k)=P(k|k-1)HT(k)·
[H(k)P(k|k-1)HT(k)+R(k)]-1
(25)

(26)
P(k)=[I-K(k)H(k|k-1)]P(k|k-1)
(27)
整个PPP-GPS/IMU紧组合流程见图1。
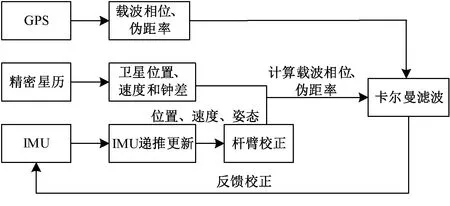
图1 PPP-GPS/IMU紧组合流程
首先,从接收机处获取原始观测文件,得到载波相位、伪距率等观测值;使用精密星历、插值计算得到所需历元卫星位置、速度和钟差。
然后,计算双频观测量减少电离层误差后的载波相位和伪距率,运用PPP中的误差模型对卫星信息和原始观测值进行校正。
最后,进行PPP-GPS/IMU紧组合,以单差消除电离层组合载波相位和伪距率为观测值,与IMU递推计算后产生的结果一起融合,滤波得到连续准确的定位结果。
3 实验设备及数据分析
3.1 实验设备及环境
为了评估PPP-GPS/IMU紧组合方法的定位效果,采用2019年6月的青藏线实际行车数据进行试验,列车运行时长约30 min,行驶距离约30 km。车载设备有:GPS接收机NovAtel ProPak6,采集频率为10 Hz;惯性测量单元iMAR FSAS,采集频率为20 Hz。参考数据来自SPAN-FSAS分体式组合定位系统,输出数据频率为10 Hz。
3.2 实验结果
实验时间内的可观测卫星数见图2,在大部分时间可观测卫星数是7,后400 s卫星数变化频繁。对应的水平精度因子HDOP值变化见图3,从中可以看出,在实验时间内,卫星信号一直是可用的。
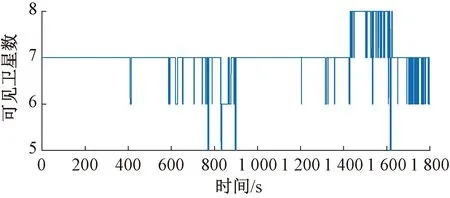
图2 卫星可见数
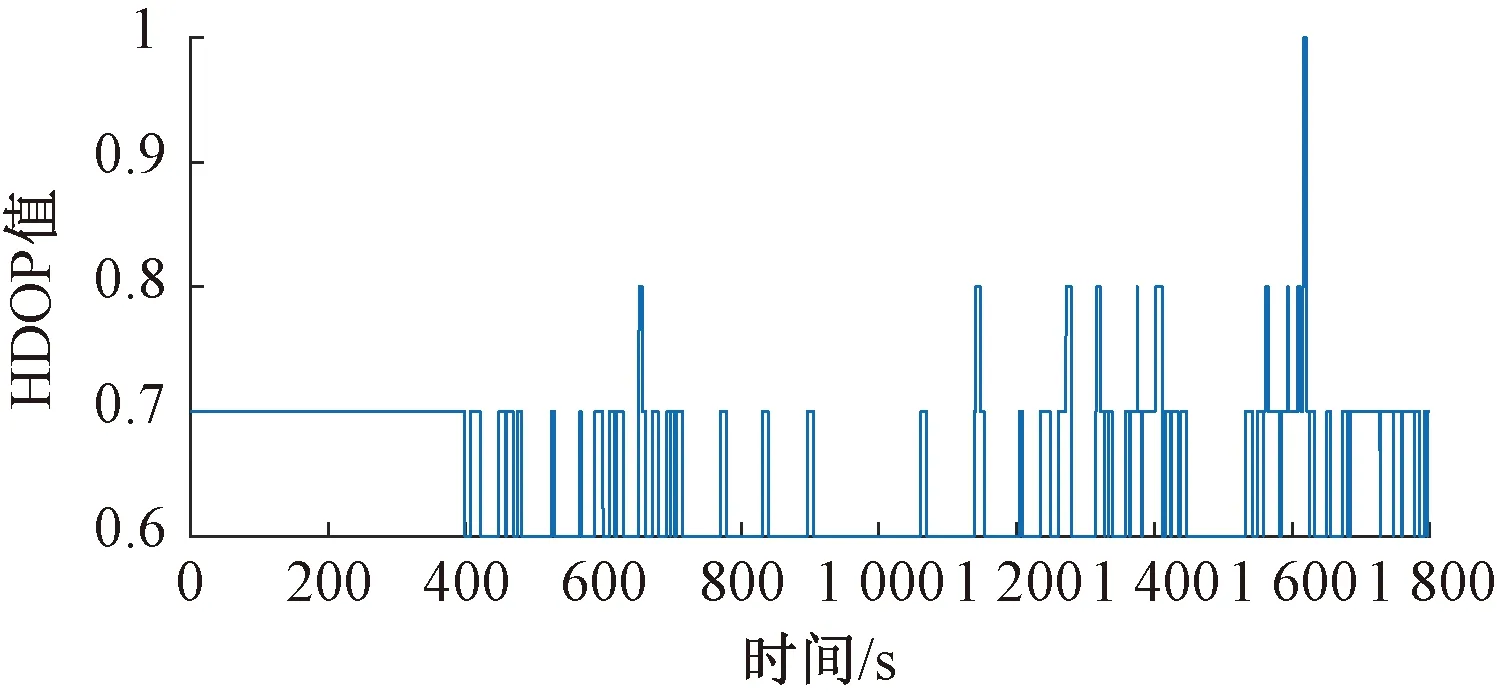
图3 HDOP变化
3.2.1 定位结果与分析
为了验证PPP-GPS/IMU紧组合算法的可用性,选择单PPP-GPS和PPP-GPS/IMU松组合的定位结果比较,三种定位方法的位置误差见图4。
从图4可以看出,东向误差中,PPP-GPS和PPP-GPS/IMU松组合的误差曲线变化较为相似,但是变化幅度从1.5 m至-1.5 m,比PPP-GPS/IMU紧组合的变化幅度大。北向误差中,PPP-GPS/IMU松组合的误差曲线有许多变化较大的地方,误差相比上一时刻增加或减少了1 m左右,对比PPP-GPS和PPP-GPS/IMU紧组合,后两者在相同的地方变化的幅度更小,结果更稳定。
整体看来,PPP-GPS和PPP-GPS/IMU松组合的位置误差曲线的走向大致是一样的,因为PPP-GPS/IMU松组合中运用的观测值就是PPP-GPS的位置结果,但是PPP-GPS/IMU松组合的位置误差曲线最不平滑。PPP-GPS/IMU紧组合的定位精度因为采用的观测值是接收机的原始数据,所以其精度和平稳性略优于PPP-GPS和PPP-GPS/IMU松组合,误差曲线的噪声较大则是因为消除电离层组合观测值的使用会引入更多的噪声。
表1为单PPP-GPS、PPP-GPS/IMU松组合和PPP-GPS/IMU紧组合三种水平定位结果误差的对比,包括北向位置误差和东向位置误差的MEAN、STD、RMS、2DRMS。其中,2DRMS表征平面坐标精度的双倍距离均方根误差(Two Distance Root Mean Square Error, 2DRMS)。
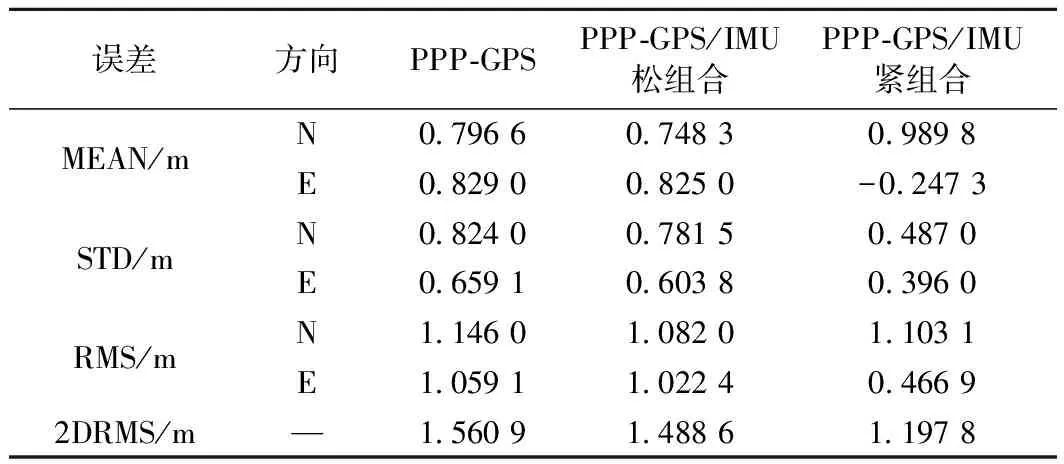
表1 三种方法定位误差结果对比
由表1可知,三种定位方法的北向和东向位置误差平均值均不超过1 m,PPP-GPS/IMU紧组合北向误差平均值较大是因为其他两种方法的误差曲线变化幅度大。PPP-GPS/IMU紧组合位置误差标准差比其他方法位置误差的标准差小,定位结果更加稳定,并且从水平位置误差的均方根可看出,PPP-GPS/IMU紧组合的定位精度优于其他两种方法。
3.2.2 测速结果与分析
图5为单PPP-GPS、PPP-GPS/IMU松组合和PPP-GPS/IMU紧组合在北向、东向和天向上的速度误差。
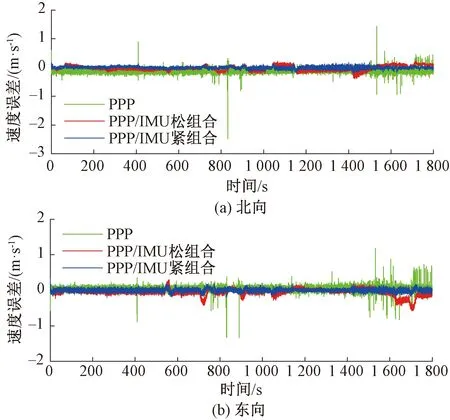
图5 三种定位方法在北向和东向的速度误差
从图5可以看出,单PPP-GPS的测速效果比PPP-GPS/IMU的测速效果差,甚至在卫星颗数较少的时刻误差会突变1 m/s左右。PPP-GPS/IMU紧组合与PPP-GPS/IMU松组合相比,误差曲线更加稳定,对比PPP-GPS/IMU松组合曲线明显凸出的部分,PPP-GPS/IMU紧组合系统抗干扰的能力更强,惯性传感器短时间精度较高的特性平滑了PPP-GPS的结果,比松组合更深层次的紧组合则发挥了更好的平滑作用。
表2也说明了PPP-GPS/IMU紧组合的测速结果从稳定性和精确度来看都优于其他两种方法,与3.2.1中的结果同样体现了PPP-GPS/IMU紧组合的优势。
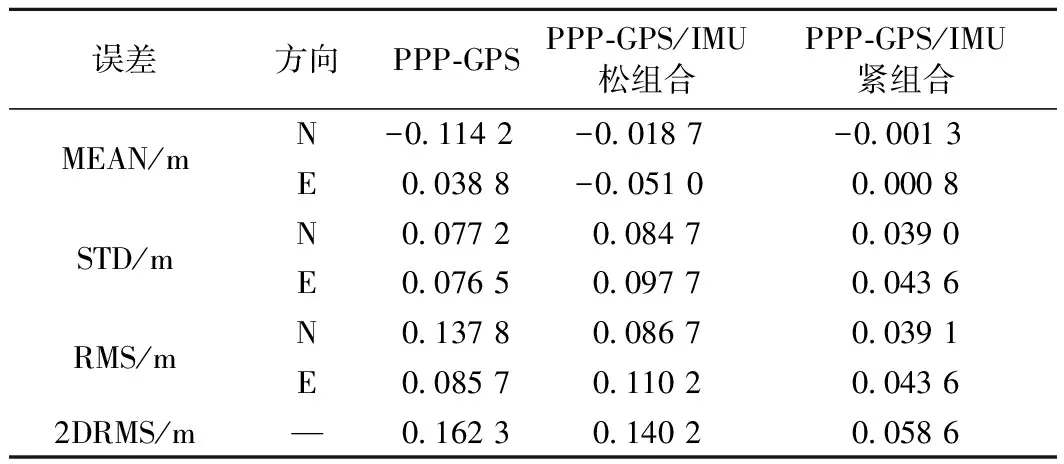
表2 三种方法速度误差结果对比
4 结束语
列车运行控制系统中,检测列车在轨道区间的占用/出清和安全行车都少不了可靠的位置和速度信息的辅助,而传统的列车定位方式需要大量轨旁设施,也不能实现连续的校准作用。针对这一情况,提出了PPP-GPS/IMU紧组合列车定位方法。采用精密单点定位技术保证GPS/IMU定位精度的同时减少轨旁设备的使用,节约建设维护成本。对卫星信号传播过程中可能遇到的误差进行分析和建模,不能被建模校正的误差则作为未知数参与卡尔曼滤波估计。为了结合精密单点定位与惯导的优点,以单差消除电离层组合载波相位和伪距率作为量测,使用扩展卡尔曼滤波进行紧组合以减少惯导累计误差,实现状态信息连续动态获取,提升列车定位性能。
最后为了评估所提出的系统,选取青藏线真实列车数据进行实验,得到北、东两方向上的位置和速度误差。与单PPP-GPS和PPP-GPS/IMU松组合比较,PPP-GPS/IMU紧组合的2DRMS为1.20 m,分别增加了23.3%和19.5%,在三种方法中定位精度最高,表现最优。