面向防洪管理的铁路无人机巡检体系研究与应用
2022-05-10石越峰危凤海付卫霖蔡德钩姚建平魏少伟
石越峰 危凤海 付卫霖 蔡德钩 姚建平 魏少伟
1.北京铁科特种工程技术有限公司,北京 100081;2.中国铁道科学研究院集团有限公司铁道建筑研究所,北京 100081;3.中国铁道科学研究院集团有限公司高速铁路轨道技术国家重点实验室,北京 100081;4.中国铁路北京局集团有限公司,北京 100860
随着线网规模不断扩大,我国铁路面临的运营环境日趋复杂,安全风险不断增多,尤其近年来我国极端天气频发,铁路防洪问题日益凸显。目前,铁路沿线防洪风险隐患排查通常采用人力徒步巡查、目视检查、手工量测等方式,存在作业效率低、研判识别率低、量测精度低等问题,无法对潜在的风险隐患形成系统、全面、准确的分析研判[1]。
无人机巡检是近几年发展起来的新兴技术,融合了航空、遥感、电子、通信等多项高端技术[2-3]。无人机巡检技术通过搭载不同载荷获取地面信息,特别适用于高陡边坡、深谷大跨桥梁、隧道洞口等巡检人员难以到达、高安全风险区域的巡检,不仅充分发挥了无人机机动性强的特点,而且提高了巡检效率和精度,降低了巡检人员作业安全风险。
在勘察设计阶段,铁路设计单位利用无人机获取影像数据,开展大范围地质调查、勘察测绘、辅助选线等工作,提高了工作效率,且数据精度可满足上述应用场景需求[4-6]。在新线建设阶段,中国铁路设计集团有限公司等单位利用无人机搭载倾斜摄影相机,获取铁路沿线及周边环境的影像和三维数字模型,实现在铁路环境监测、环保验收、静态辅助验收中的应用[7-8]。在既有线运维阶段,中国铁道科学研究院集团有限公司等单位提出了利用无人机判定铁路沿线病害的工作流程与方法,同时实现了对滑坡、崩塌、泥石流等地质灾害的监测与评估[9]。
综上所述,目前铁路无人机巡检技术主要集中在勘察设计、工程管理、地质灾害评估等方面,鲜有对铁路防洪风险隐患排查与评估的研究。随着铁路全年防洪、全员防洪、科学防洪理念的提出,亟待开展铁路无人机防洪巡检技术体系研究。本文提出铁路无人机巡检技术方案,建立基于无人机巡检的铁路防洪管理体系,并结合邯长铁路,系统介绍无人机巡检技术在铁路防洪风险隐患排查中的功能实现与具体应用情况。
1 无人机巡检技术方案
1.1 无人机平台
按照飞行原理划分,无人机分为固定翼和旋翼两大类。固定翼无人机在飞行速度、高度、观测范围、续航等方面均具有明显优势,但其起降要求高,通常需要跑道滑行,目前主要应用于铁路工程大范围航空测绘、线路选线等方面[10]。旋翼无人机起降不受场地限制,机动性强,且可空中定点悬停,虽然工作效率受制于无人机续航问题,但随着电池行业的快速发展,续航得到明显改善,成为铁路领域应用的主要机型。
轻量化、集成化和多样化是无人机研发的重要发展方向。国内多家厂商研制了满足搭载不同载荷要求的系列无人机,例如大疆精灵4RTK无人机集成了导航定位系统和高性能成像系统,是轻量化、集成化机型的代表,大疆经纬M300系列无人机突出飞行稳定性、长续航能力。代表性无人机机型及参数见表1、表2。其中D为测量距离,单位为km。

表1 大疆精灵4RTK无人机技术参数
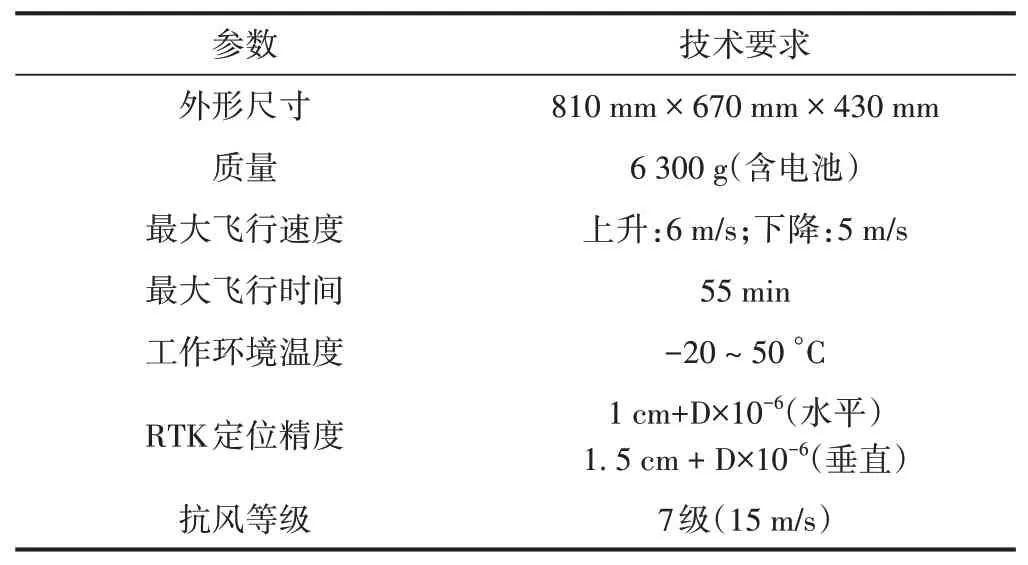
表2 大疆经纬M300无人机技术参数
1.2 载荷
1.2.1 正射相机
正射相机以可见光相机为主,通过搭载飞行平台,以手动或自动曝光方式获取被测目标的影像。正射相机可通过正射纠正消除由于相机旋转、地形起伏以及在图像获取和处理过程中产生的位置误差,最终生成无变形、高精度、高分辨率的影像。本研究将索尼A7RⅡ型相机与激光雷达集成,相机总质量582 g,可拍摄4 400万像素相片。
1.2.2 视频相机
视频相机可直接安装于轻型无人机云台适当位置,摄像机采集的视频信号经图传信号发送器传送到地面的接收系统,再通过SDI/HDMI传输到显示设备,操控者即可实时监控航拍影像。目前机载实景视频已成为电力、农业、环保、应急等领域开展评估工作的重要数据。随着相机技术与互联网技术的发展,机载视频影像质量更高,传速度更快。本研究选用大疆精灵4RTK无人机搭载视频相机,可拍摄2 000万像素的相片及4 K/30 fps视频,图传距离达7 km。
1.2.3 倾斜摄影相机
倾斜摄影相机可从前、后、左、右、垂直5个方向对地物进行拍摄,同时获取1个正射和4个方向的影像,再通过内业的几何校正、平差、多视影像匹配等一系列处理,即可得到具有地物全方位信息的数据[11]。本研究选用山东省科学院组织技术实验室研发的塞尔102S倾斜摄影相机,该相机的具体技术参数见表3。

表3 塞尔102 S相机技术参数
1.2.4 激光雷达
激光雷达通过发射和接收激光束信号的时间差和相位差,计算到目标对象的相对距离,同时利用此过程中收集到的目标对象表面大量密集点的三维坐标、反射率和纹理等信息,快速建立被测目标的三维点云模型[12]。多数激光雷达使用偏转镜偏转激光束,以增加测试范围,目前通过自旋转可实现360°可见。本研究选用蜂鸟Genius16激光雷达,其具体技术参数见表4。

表4 蜂鸟Genius16激光雷达技术参数
1.3 航线设计
铁路为带状工程,沿线经过山区、河流等复杂地形,无人机采用传统固定航高的飞行模式,这种飞行方式采集的影像数据沿航线变化,会导致被测目标细节缺失,在地形落差较大的区域可能出现空三加密计算失败的情况[13]。为了保证数据高精度与完整性,提高无人机巡检作业效率,提出了仿地飞行的作业模式。仿地飞行是指无人机在飞行作业过程中,航线与三维地形实时保持相对固定的高差,使无人机能够适应不同的地形环境,根据地形执行变高航线,不仅避免了无人机山区作业撞山事故,而且保持了重叠率与地面分辨率不受地形变化影响。无人机仿地飞行轨迹如图1所示[14]。

图1 无人机仿地飞行轨迹示意
为保证数字成果内业处理精度与效果,正射相机拍摄的旁向重叠度和航向重叠度分别为45%和65%,倾斜摄影相机的航线按照旁向重叠度75%、航向重叠度75%进行设定,激光雷达的航线按照航带重叠度10%进行设定。
2 基于无人机巡检的铁路防洪管理体系
2.1 无人机巡检成果形式与特点
无人机搭载正射相机、视频相机、倾斜摄影相机、激光雷达等不同载荷,可分别获取数字正射影像图(Digital Orthophoto Map,DOM)、实景视频、三维实景模型和三维点云模型。其中,三维实景模型包含DOM,经处理可得到数字地表模型(Digital Surface Model,DSM);三维点云模型经不同处理可得到数字高程模型(Digital Elevation Model,DEM)、DSM、数字线划地图(Digital Line Graphic,DLG)等不同数字成果。无人机巡检成果类型如图2所示。

图2 无人机巡检成果类型
各数字成果的展示形式、内容、精度等特点不同,使得其在铁路巡检中的应用场景和适用范围不同。各类无人机巡检成果形式与特点,见表5。

表5 不同数字成果特点
2.2 铁路防洪管理场景
针对不同季节,开展汛前、汛中、汛后防洪风险隐患排查以及各类专项排查。根据各阶段防洪管理任务特点不同,防洪风险隐患排查的侧重点也不同[15]。
1)汛前风险隐患排查:对防洪设备进行全面排查与评估,确定本年度防洪重点地段及防洪预抢工程,建立或修订防洪设备风险隐患台账与防洪预案。
2)汛中风险隐患排查:可分为雨前预警与响应、雨中巡查与处置、雨后检查与防范,排查水害发生情况,组织实施水害抢险工程。
3)汛后风险隐患排查:对设备防洪能力进行重新评估,分析重点风险隐患的成因及发展趋势,更新和完善设备履历台账及历史特征。
4)专项排查:根据线路及周边环境特点,不定期开展滑坡、崩塌落石、泥石流、溜坍等地质灾害或其他专项风险隐患排查与评估。
2.3 多层次铁路防洪风险隐患排查体系框架
针对无人机巡检不同成果的特点与适用范围,结合现有铁路防洪管理的方法和具体内容,提出了铁路无人机多层次防洪风险隐患排查体系框架(表6),具体包括以下四个应用层级。
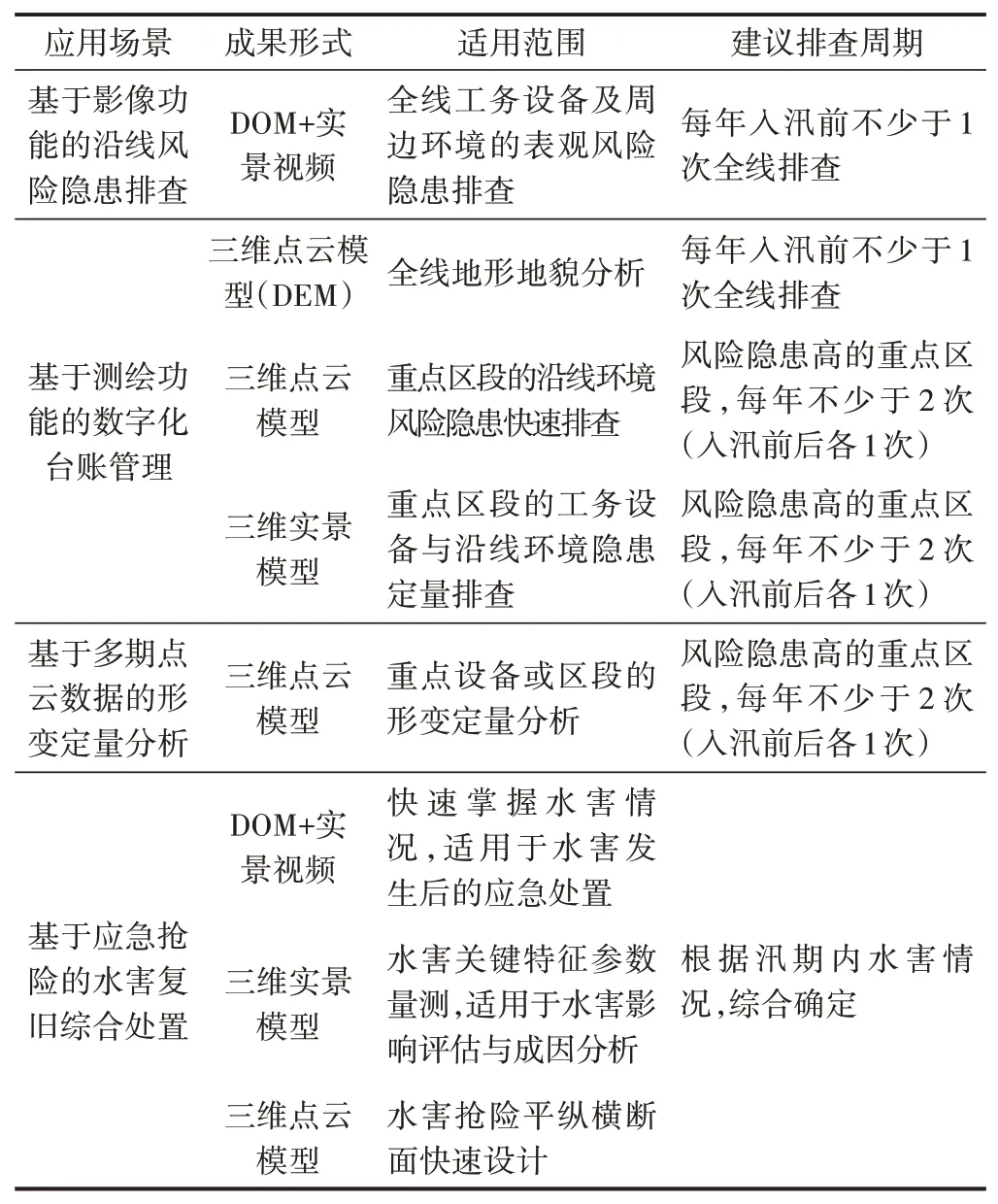
表6 无人机多层次铁路防洪风险隐患排查体系框架
1)基于影像功能的沿线风险隐患排查。利用无人机DOM与实景视频快速开展工务设备及周边环境的表观风险隐患排查,如废旧轨枕、彩钢瓦、地膜等异物侵限,以及主被动网、拦石网、浆砌片石等防护设备损坏、排水设备失效等。
2)基于测绘功能的数字化台账管理。利用三维点云模型快速建立铁路沿线DEM,掌握铁路沿线地形、地貌等基础勘测信息,同时利用激光点云植被穿透性强的特点,对铁路重点区段的沿线环境风险隐患进行快速排查。倾斜摄影航迹复杂、采集效率低,但成果可量测、直观性强,可对重点区段的工务设备及沿线环境风险隐患进行定量排查,如工务设备几何形位判断、工务设备表面破损、开裂等排查。三维点云模型和三维实景模型精度优于10 cm。
3)基于多期点云数据的形变定量分析。利用多期三维激光点云数据进行对比,明确隧道洞口仰坡、挡护设备、排水设备及周边环境是否发生变形,实现重点设备或区段的变形定量分析,同时结合人工现场复核与其他影像数据排查防洪风险隐患。
4)基于应急抢险的水害复旧综合处置。①利用DOM与实景视频快速掌握水害规模、实际情况;②利用三维实景模型量测水害关键特征参数,开展水害影响评估与成因辅助分析;③利用三维点云模型快速获取水害区段的平面图与横纵断面图,直接用于水害抢险工程设计。
3 试验与分析
邯郸—长治铁路全长221.7 km,沿线经过清漳河和浊漳河两条主要河流,地质情况较为复杂。2021年5月和7月分别对邯长铁路悬钟站至桃城站K130+874—K135+900、南峧站至下湾站区间K151+700—K156+572共计约10 km长线路开展了两次无人机巡检。
3.1 数据获取与处理
按照预先设定的航线进行数据采集,选用大疆精灵4RTK型无人机搭载1英寸影像传感器采集实景视频,选用大疆经纬M300型无人机分别搭载塞尔102S倾斜摄影相机和蜂鸟Genius16激光雷达(集成索尼A7RⅡ型正射相机)采集倾斜摄影影像、激光点云数据和DOM。
飞行任务结束后,主要开展倾斜摄影影像、激光点云数据进行内业处理。在倾斜摄影成果处理方面,首先检查实际影像重叠度、像片倾角和旋角、航线弯曲度,摄取覆盖范围、影像的清晰度、像点位移等信息,核查数据质量;然后将控制点坐标数据和影像的定位与定姿系统(Position and Orientation System,POS)数据作为外方位元素的初始值进行联合平差;最后使用内业处理软件生成三维实景模型。在激光点云数据处理方面,首先进行数据预处理,包括POS数据处理与GPS数据差分计算,将原始数据结算为可操作的LAS格式;然后将LAS格式的激光点云数据进行裁剪、去噪滤波、分类;最后使用点云专业处理软件生成三维点云模型。
3.2 结果分析
对邯长铁路K130+874—K135+900、K151+700—K156+572区段的隐患风险进行全面分析。按照路基、桥梁、隧道等典型工务设备全覆盖的原则,选取K132+739—K134+761为代表性区段,重点阐述该区段的分析结果。邯长铁路K132+739—K134+761沿线工务设备分布情况见表7。

表7 邯长铁路K 132+739—K134+761工务设备分布情况
3.2.1 基于影像功能的沿线风险隐患排查
根据铁运〔2008〕96号《铁路路基大维修规则》的相关规定,利用DOM和实景视频对被测区段全线的风险隐患进行排查,发现K132+856—K132+885、K134+369—K134+389、K134+403—K134+447共三个路基区段在线路两侧堆放了大量轨枕,同时K134+369—K134+447区段存在排水沟排水不畅等隐患,如图3所示。

图3 某工点轨枕侵限与排水沟排水不畅
3.2.2 基于测绘功能的数字化台账管理
根据邯长铁路重点区段的三维实景模型和三维点云模型,通过量测功能,明确了沿线工务设备的分布情况,建立了工务设备和风险隐患数字化台账管理,极大地提升了工务部门管理效率与水平。典型区段的三维实景模型与三维点云模型如图4所示。

图4 典型区段三维实景模型与三维点云模型
3.2.3 基于多期点云数据的形变定量分析
针对被测区段的隧道洞口、防护设备、排水设备等重点工务设备,利用2021年5月和7月两期三维激光点云数据,经裁剪、去噪、配准、面变形对比,直观分析被测目标的变形情况,如图5所示。其中蓝色区域表示被测目标未发生变形,其余颜色则表示产生变形。由图5(a)可知,邯长铁路K132+856靳家会1号隧道洞口未发生变形,各项工务设备服役状态良好。根据图5(b)和图5(c)的分析结果可知,邯长铁路K134+447小会1号隧道洞口产生变形,且变形主要集中在排水沟附近,结合三维实景模型和人工现场复核情况,确定该处排水沟存在淤堵、排水不畅的隐患。

图5 点云数据多期对比结果与变形工点影像
3.2.4 基于应急抢险的水害复旧综合处置
邯长铁路一路堑高挡墙顶部发生浅层滑坡,通过无人机搭载激光雷达和正射相机,将三维点云模型与DOM进行融合处理,形成了水害工点的三维数字模型,快速掌握了水害全貌特征,经处理得到水害工点的平面地形图和横、纵断面图(图6),为水害抢险工程的快速、科学设计提供了有力支撑。

图6 一水害工点无人机巡检成果
4 结语
铁路防洪风险隐患排查主要以人工巡检为主的模式,存在效率低、成本高、人员安全风险大等问题,无法满足铁路大规模、精细化、智能化巡检要求。本文在系统总结梳理了无人机飞行平台、载荷、航线设计、数字成果等特点的基础上,结合铁路防洪管理特点,提出了具备沿线隐患排查、数字化台账管理、形变定量分析、水害应急处置等功能的无人机多层次铁路防洪风险隐患排查体系框架,并依托邯长铁路进行了示范应用,为无人机巡检技术在铁路防洪管理中的应用提供了有力支撑。
