一种D-S证据理论的多传感器数据融合算法
2022-05-10周恩帆周永杰王欠欠陈博行
周恩帆,马 俊,周永杰,王欠欠,陈博行
(青海师范大学 物理与电子信息工程学院,西宁 810008)
1 引 言
随着科学技术的发展,单一传感器已经不能满足工业、军事、医药及日常生活的需要.多传感器数据融合是一个具有广泛应用前景的新兴研究领域,其基本原理就像人的大脑在多个环境因素下综合处理事件一样,将各种传感器得到的数据进行多层次、多时空[1]的信息互补和优化组合处理,最终产生对目标环境的统一判断结果.常见的数据融合有加权平均法、卡尔曼滤波法、贝叶斯估计法、Dempster-Shafer(D-S)证据理论、产生式规则等[2-5],但因为传感器老化和数据采集过程中其它因数干扰所产生的不确定性,往往会造成数据的异常,处理这种不确定性最常用贝叶斯估计法和D-S证据理论.但贝叶斯估计法需要用到以前的先验概率,来得到新的概率,在很多情况下并不适用[6].D-S证据理论能在先验概率未知的情况下对不确定性问题进行融合,利用基本概率赋值来表示不确定性问题的概率大小,该方法具有良好的融合效果[7].Yager[8]在D-S证据理论中引入了未知项m(x)来减小证据间的冲突问题.Murphy[9]提出了一种均值证据组合规则,在证据较多时能够取得良好的融合效果,但没有考虑到证据间的关联,证据较少时融合效果不理想.孙伟超[10]等针对目前区间证据合成方法存在融合失效的问题,分析了其产生的原因并提出新的区间证据组合方法.对证据源本身的特征进行提取,依此对证据进行修改,并提出两种优化方法用于区间信度结构下的证据合成.周剑[11]等提出了一种基于区间证据理论的多传感器数据融合水质判断方法,该方法能够对个别传感器值异常的情况下判断水质等级,但对于极端的数据不能很好的进行融合,并且区间数计算量过于庞大.谢苗苗[12]等用箱线图法和均值替代法检测并修复异常数据,然后利用自适应加权融合算法实现同类传感器数据一级融合,最后利用改进D-S证据理论算法,实现全局融合决策.本文方法将从多传感器得到的同类数据先进行处理并融合,再将处理后的异类数据进行D-S证据理论融合,最后按照决策标准判断融合后的结果.针对目前证据合成方法存在融合过程冲突大的问题,分析了其产生的原因并提出新的证据组合方法.数值实验结果表明,提出的方法在面对冲突区间证据融合时得到了合理的结果.
2 D-S证据理论组合规则
2.1 D-S证据理论
证据理论是Dempster于1967年首先提出,由他的学生Shafer于1976年进一步发展起来的一种不精确推理理论,也称为Dempster/Shafer证据理论(D-S证据理论)[13].近年来,随着多传感器的大力发展,D-S证据理论引起了广大学者的研究和关注.D-S证据理论是一种不精确的推理理论,最早应用于专家系统中,能处理不确定信息,并且具有表达“不确定”和“不知道”的能力[14].
定义1.在D-S证据理论中,令Θ为辨识框架,Θ是一个非空的有限集合,Θ={θ1,θ2,…,θn},其中θ中元素两两互斥,θ1表示对事物或事件做出的一种决策或判断.Θ中包含了关于θi所有可能的命题.对于Θ中的每个子集按照某个规则分配一个概率,称为基本概率分配.基本概率分配函数,也称为mass函数.
定义2.设Θ为识别框架,2Θ为Θ的所有子集构成的集合,则m:→[0,1]为基本概率函数,对于m的任何一个子集A,令m(Ai)∈[0,1],则满足以下条件:
∑A⊆Θm(Ai)=1,m(Ø)=0
(1)
则称m为Θ上的基本概率赋值函数,m(A)称为A的基本概率数,表示对A的精确信任.
定义3.(D-S组合公式)设识别框架Θ下两证据的基本概率赋值函数分别为m1和m2,则D-S组合公式为:
(2)
并且:
k=∑Ai∩Bj=Øm1(Ai)m2(Bj)
(3)
其中C∈2Θ,Ai∈2Θ,Bj∈2Θ:i,j=1,2,…,N;k表示证据间的冲突系数.
2.2 D-S证据理论存在的高冲突问题
D-S证据理论在处理不确定性问题方面具有很大优势,但当几个证据间冲突大的时候融合后常常会产生悖论[15].如何处理这种悖论是一个值得研究的重要问题,传感器节点中因传感器的老化和其他干扰因素,造成了采集到的数据偏差较大,甚至出现数据为零的情况,在对其进行基本概率赋值(BPA)时就会造成mass函数值偏小或者为零的情况.例如表1是3个水质传感器M1,M2,M3采集到的水质数据,可以看到M1,M3的值明显偏向于水质等级Ⅰ,虽然M2传感器更偏向于水质等级Ⅲ,但是M2传感器在水质等级Ⅰ时的mass值为0,导致M1,M2,M3融合后对等级Ⅰ的支持度为0.这时M2就会对整个融合结果产生影响导致决策判断水质等级为Ⅲ.
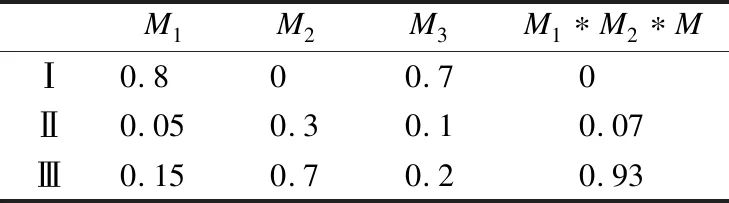
表1 M1,M2,M3采集到的数据Table 1 Data collected by M1,M2,M3
如何处理D-S证据理论中出现的悖论问题[16],通常从两个方面去解决:1)改变证据融合规则;2)改变证据的获取从而改变mass值.本文从这两个方面入手避免融合过程中产生的冲突问题,并降低构造mass函数的复杂度,让融合结果更加准确.
3 改进的D-S证据理论的多传感器数据融合决策模型
本文先对各个传感器节点采集到的同类数据进行整理集合,再对同类数据进行剔除异常数据并融合,最后再对异类数据进行融合决策,最后得出决策结果.基于D-S证据理论的多传感器信息融合决策模型,如图1所示.
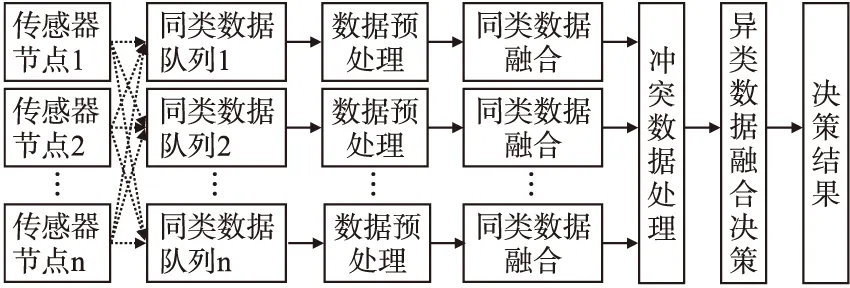
图1 基于D-S证据理论的多传感器数据融合决策模型Fig.1 Multi-sensor data fusion decision model based on D-S evidence theory
3.1 基于欧式距离的同类数据异常值剔除
本文提出了一种基于欧式距离的同类数据异常值剔除方法,剔除多传感器数据中出现的异常值.其基本思想是当两个同类数据间的距离越小,则代表相似程度越大,数据的真实性越大,反之亦然.通过得到两两数据间距离的和的平均值,并设定相应的阈值来剔除异常值.
设传感器个数为n,则采集到的同类数据Si={si|i=1,2,…,n},si和除si以外的其他同类数据sj的距离可以表示为:
(4)
由公式(4)可以计算出si和除si以外的其他同类数据sj的距离,并表示成一个距离矩阵:
(5)
距离Dd(dij)反映的是和其他数据的相似程度,Dd(dij)中元素值越小,其相似程度越大.
(6)

DSUP(si)=1-DG(si)i=1,2,…,n
(7)
同类数据的信任函数DSUP值反映数据的真实性,通常DSUP(si)值相差不大,并且DSUP(si)越大,数据越真实.当同类数据中出现异常值时,DSUP(si)值会非常小,并且异常值间的DSUP(si)值会非常接近;反之正常值比较大,且集中.设置阈值δ=DSUP(m)×2%,DSUP(m)为DSUP(si)的中位数.当DSUP(m)-δ≤DSUP(si)≤DSUP(m)+δ时,保留DSUP(si)值并剔除异常值得出正确的同类数据.
3.2 基于欧式距离的异类数据融合
(8)

(9)
利用公式(10)对信任函数MSUP(si)进行归一化处理作为D-S证据理论的mass函数,如表4所示.最后利用D-S组合公式(2)和公式(3)进行最后的融合,得出融合结果.
(10)
4 实验与结果分析
4.1 实验环境
为了验证本文算法的有效性,设置了两个仿真实验.第1个为水质判断实验,其数据为模拟真实数据所假设的数据;第2个为大气环境质量判断实验,其数据为真气网2020年10月1日至2020年10月31日的西宁城区24小时大气数据,传感器为:PM2.5、PM10、SO2、CO、NO2空气质量传感器,并在matlab R2018a软件下实现算法验证.
4.2 实验1
假设把基于D-S证据理论的多传感器数据融合决策模型应用于水质判断中.我们需要采集氨氮(NH3-N)、总磷(TP)、溶解氧(DO)等水质参数,并设传感器的精度分别为PNH3-N=0.005,PTP=0.01,PDO=0.05.令识别框架Ti={T1,T2,T3,…,Tn},本文按照《国家地表水环境质量标准(GB3838-2002)》[17]将水质分为5个等级,即θ={Ⅰ,Ⅱ,Ⅲ,Ⅳ,Ⅴ}.


表2 水质参数特征表Table 2 Water quality parameter characteristics Table
表3为模拟平时的真实水质数据所假设的45个同一时刻临近水域采集的水质数值,其中数据为0和同类数据中偏大、偏小的数据作为模拟多传感器采集数据过程中出现的异常情况.先对同类数据进行处理,将15个传感器采集到的同类数据NH3-N含量放入矩阵为:
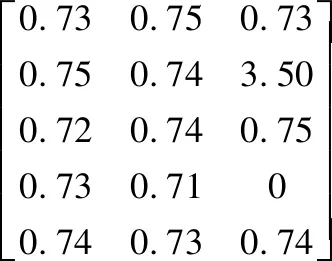
表3 水质监测数值Table 3 Water quality monitoring values
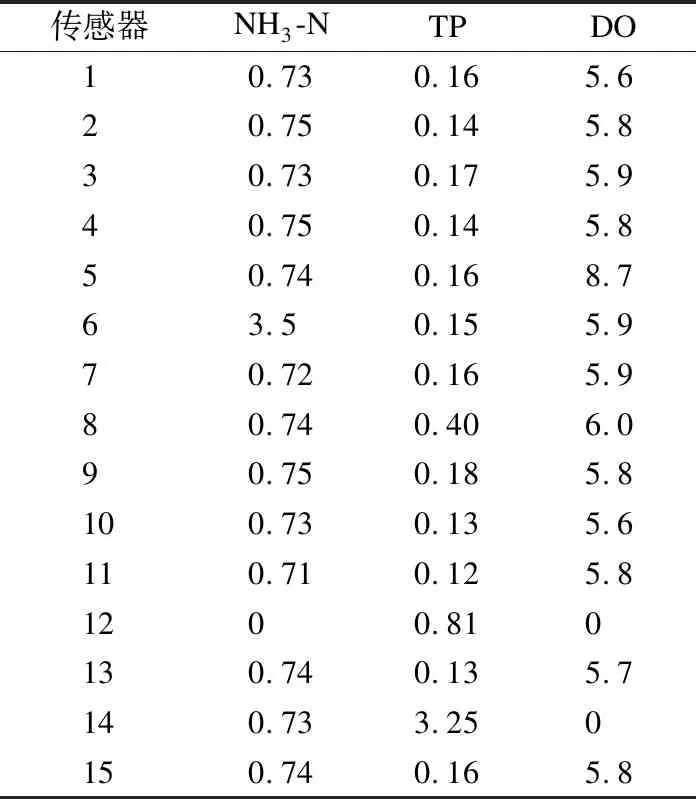
传感器NH3-NTPDO10.730.165.620.750.145.830.730.175.940.750.145.850.740.168.763.50.155.970.720.165.980.740.406.090.750.185.8100.730.135.6110.710.125.81200.810130.740.135.7140.733.250150.740.165.8
根据式(4),可以得到15个传感器采集到的数据si与其他数据sj间的距离d(si).

⋮
得出距离矩阵:
距离Dd(dij)反映的是和其他数据的相似程度,Dd(dij)值越小,其相似程度越大.根据距离矩阵给出每个数据的相似度:
求出一个数据的归一化相似度DG(sij)后,可以获得同类数据的信任函数DSUP(sij)
通过图2可以看出15个传感器在同一时刻临近水域采集数据的一个信任程度,明显看出第8和第12传感器的数据整体严重偏离,表现为异常值.取DSUP(sij)中位数DSUP(m)=0.9454为准值,设置阈值的2%为δ,δ=DSUP(m)*2%=0.0189,当值DSUP(sij)满足DSUP(m)-δ≤DSUP(sij)≤DSUP(m)+δ时,保留数据;反之,剔除DSUP(sij)中的异常值并保留正确的数据.

图2 信任函数Fig.2 Trust functions

表4 各水质参数的mass函数值Table 4 Mass function values of water quality parameters
将得到的mass函数用D-S证据组合公式进行融合,得到融合结果如表5所示.专家的水质等级判断结果为Ⅲ,可以看出直接用D-S证据理论进行融合会因为冲突的证据导致对水质等级的结果识别始终为Ⅰ,且与其他等级间的区分度小.Mruphy[9]的平均方法虽然能正确识别出水质等级,但由于Mruphy没有证据之间的相关性,笼统的将证据进行平分来减小证据间的冲突,导致算法在两个证据时,将结果识别为Ⅱ,在收集了3个证据时才正确的得到等级Ⅲ.Zhou Jian[14]的权重法和本文的方法都能正确的识别水质等级,而本文的水质等级3个证据融合决策结果0.7796比Zhou Jian的0.4837水质融合结果区别度更高,融合结果更好.
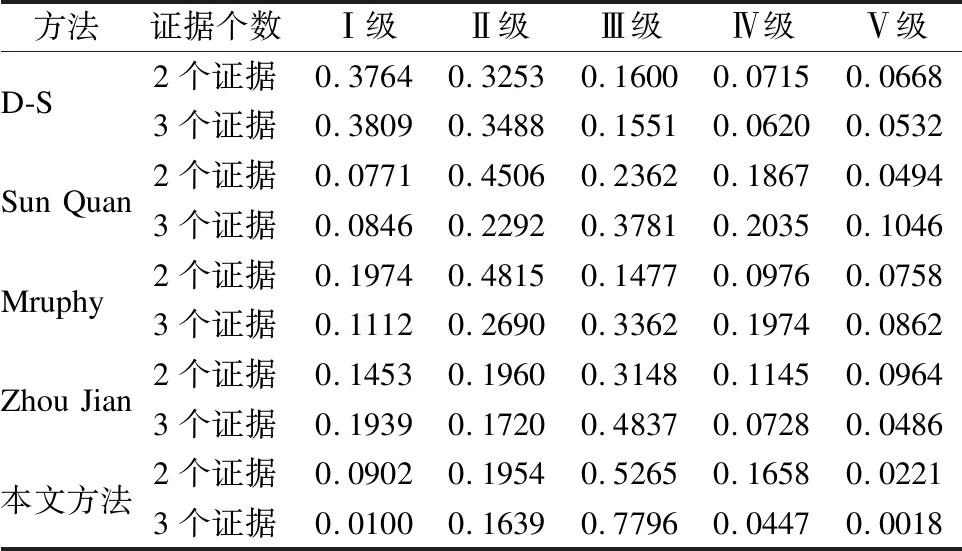
表5 两个水质参数和3个水质参数的融合结果Table 5 Fusion results of two water quality parameters and three water quality parameters
图3是证据个数为2的融合结果,图4是证据个数为3的融合结果,当证据个数为2时,Sun Quan[7]和Mruphy的算法融合结果都错误的偏向Ⅱ级,D-S证据理论因为不能处理冲突识别结果直接为Ⅰ级.当有3个证据融合时,只有D-S证据理论的识别结果不正确,其他几个算法都正确的识别出了水质等级Ⅲ,但本文的识别结果最好.从图3和图4看出本文的方法不仅能在证据较少时准确的识别出结果而且识别出的值更高,更具有说服力.
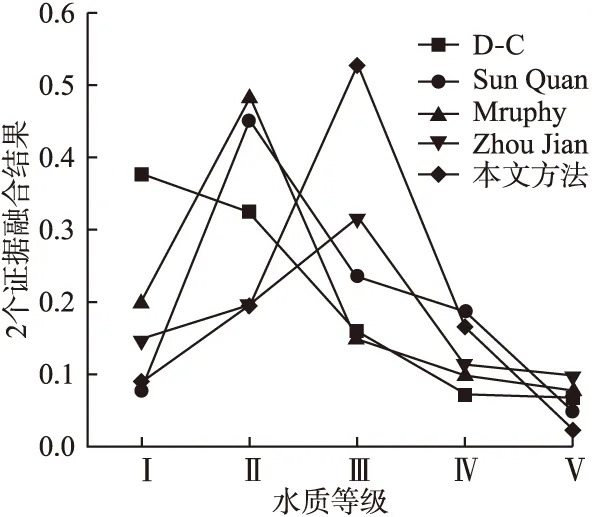
图3 2个证据的融合结果Fig.3 Fusion results of the two evidences

图4 3个证据的融合结果Fig.4 Fusion results of the three evidences
4.3 实验2
把基于改进的D-S证据理论多传感器数据融合决策模型应用于大气环境质量中.令识别框架Ti={T1,T2,T3,…Tn},按照《环境空气质量标准》(GB3095-2012)将大气环境质量分为4个等级,即θ={Ⅰ,Ⅱ,Ⅲ,Ⅳ}[17].

表6 大气质量特征值Table 6 Characteristic values of atmospheric mass
表7为155个31天西宁城区采集的大气质量参数数值,得到的大气质量参数PM2.5、PM10、SO2、CO、NO2数值作为1个传感器系统5个传感器采集的155个大气质量参数值,更改其中的5个数据,使其值为0作为模拟多传感器采集数据过程中出现的异常情况所修改的值,通过多传感器数据融合算法最终得到一个大气质量数据31天的融合结果.
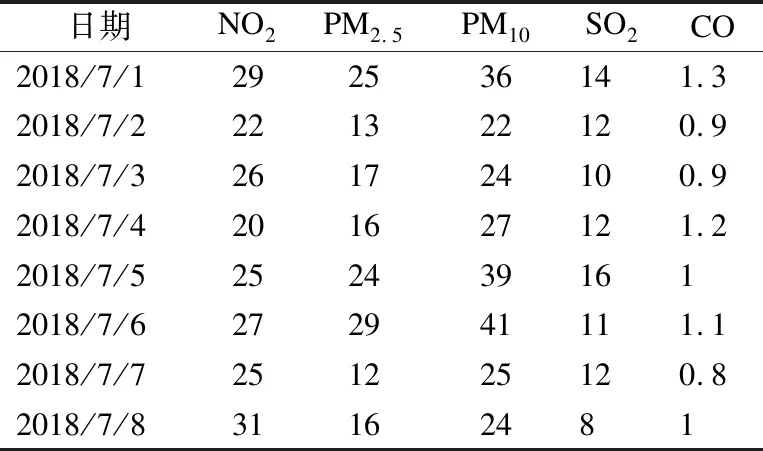
表7 31日大气污染参数实时监测数值Table 7 Real time monitoring values of air pollution parameters on July 31

日期NO2PM2.5PM10SO2CO2018/7/9332438161.72018/7/10321532151.12018/7/11232041191.12018/7/1227246701.32018/7/13302260261.32018/7/14341955211.42018/7/1527214081.12018/7/16352354131.32018/7/17461856002018/7/18412561221.52018/7/19281732131.42018/7/20301220110.92018/7/21231325130.82018/7/2201834180.82018/7/2329110100.82018/7/24361834171.12018/7/25382242161.22018/7/263927532512018/7/27343158151.22018/7/283232571412018/7/29232962110.92018/7/30251535110.92018/7/31281636121
把同类大气PM2.5、PM10、SO2、CO、NO2数据代入公式(4)~公式(7),得出其中的NO2的DSUP信任函数结果如图5所示.
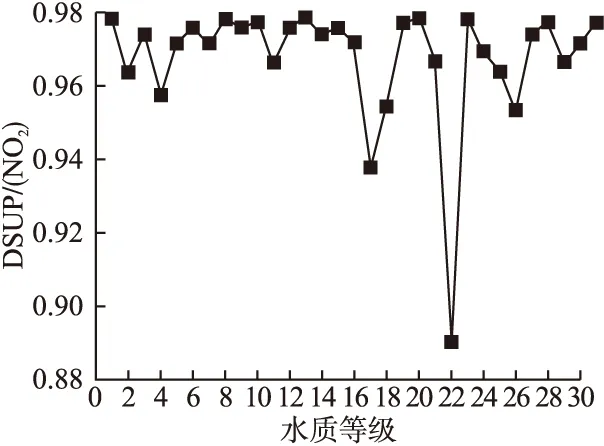
图5 NO2的DSUP信任函数Fig.5 DSUP trust function for NO2

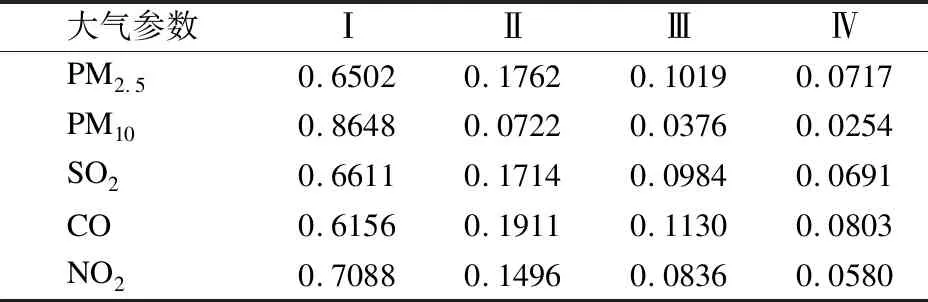
表8 大气参数的mass函数值Table 8 Mass function values of atmospheric parameters
最后将得到的mass函数利用D-S组合公式(2)和公式(3)进行最后的融合,得出31天的大气数据融合结果如表9所示.专家的大气质量等级判断结果为Ⅰ,实际案例中本文方法与专家结果一致,且融合结果比较好.
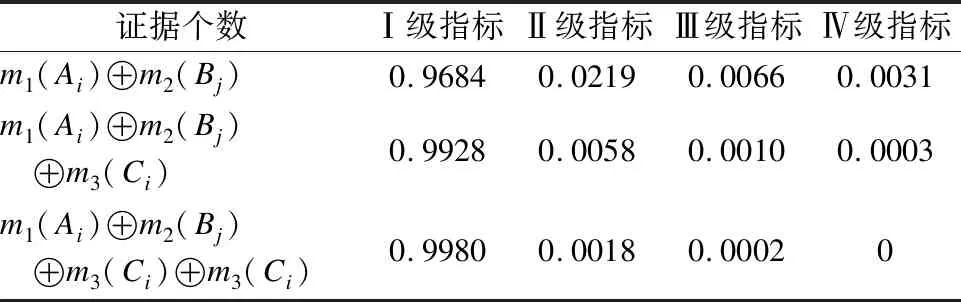
表9 融合结果Table 9 Fusion results
本文的基于D-S证据理论的多传感器数据融合算法通过水质判断和大气质量等级评价仿真分析都有较好的实验结果.
5 结束语
本文将D-S证据理论应用于多传感器数据融合,针对多传感器网络中采集的数据中存在的不确定性和D-S证据理论中产生的高冲突问题提出了一种新的多传感器数据融合判断方法.先进行同类数据融合,提出了基于欧式距离的同种数据异常值剔除,再用融合后的同类数据求取信任度函数,归一化后得出无冲突的可靠mass函数值,按照D-S证据组合规则将得到的异类数据融合,最后根据决策规则,判断多传感器数据融合等级.仿真分析表明,该方法具有良好的识别率和区分度并且能够在个别传感器数据异常的情况下,准确的判断出多传感器数据融合等级,并且具有应用范围广等特点.