高速公路曲线路段驾驶员速度感知变化规律
2022-05-09刘婷,裴霏,王倩
刘 婷, 裴 霏, 王 倩
(西安交通工程学院 土木工程学院, 西安 710300)
相关事故统计报告表明,超速是平曲线事故发生及增加事故严重程度的重要因素,而超速往往与驾驶员的“速度感知”有关。行车过程中,实时车速的获取是驾驶员多知觉(视觉、听觉、触觉等)综合感知的结果。基于此,从“路”的角度出发,道路结构特性、路侧环境、几何特性等都会影响速度感知结果。道路结构特性方面,有学者[1-5]从视觉感知的角度出发,研究了减速标线、路面色彩、路面宽度、路肩等因素对速度感知的影响。路侧环境方面,有学者[6-8]通过对路侧行道树、冰雪天气、雾天等因素的研究,发现随着路侧参照物的丰富,驾驶员的速度感会增强。道路几何特性方面,程国柱等[9]通过回归分析实车数据发现:当车速大于100 km/h时,感知车速与平曲线半径呈现较强的相关性,与纵坡大小无关。Deton[10]研究了直线路段上驾驶员的“速度适应性”现象,即前一时刻运动状态的残留影像会影响当下的车速感知。余博等[11]从驾驶员视觉感知的角度出发,综合考虑视觉车道信息和视觉路侧环境信息,建立了基于道路几何信息感知的车速预测模型。Milosevic等[12]发现驾驶员在小半径曲线的中间部分会低估车速,当车速较高时低估程度会更严重。有学者认为曲线路段驾驶员低估车速可能与入弯前的减速行为有关。对于设计指标不连续的路段或其他进入弯道前需要大幅降低车速的情况,由于速度惯性的存在,减速后的感知车速会远低于自身车速[13]。相关事故资料也表明,入弯前显著降低车速的平曲线路段的确存在更突出的安全问题[14]。因此,研究曲线路段驾驶员速度感知规律对提高道路安全水平有重要意义。目前关于线形条件与车速感知关系的研究较少,且针对曲线路段感知车速的研究多集中于某一固定的点位。
本文选取不同半径的曲线路段为研究对象,开展室内试验,分别采集各曲线段上不同特征点位处的感知车速与实际车速,并对特征点位处车速感知误差程度进行量化分析,得到曲线路段车速感知误差变化规律。
1 模拟驾驶试验设计
1.1 模型构建
采用三维虚拟现实仿真软件UC-win/Road构建模拟驾驶场景模型。模拟驾驶场景选取设计速度为100 km/h的双向4车道高速公路,车道宽3.75 m。根据《公路工程技术标准》(JTG B01—2014)中极限最小半径的规定,兼顾现有公路设计指标,增设稍大的圆曲线半径,最终选取曲线半径R依次为400 m、500 m、650 m、800 m、1 000 m。为避免其他因素可能对感知车速带来影响,控制试验段路侧环境单调、纵坡小于2%。超高过渡采用线性内插法。路段交通流为自由流。为保证车辆进入平曲线时具有一定的速度,平曲线路段前设置长2 km的直线路段。曲线入弯点附近模拟道路场景如图1所示。
1.2 试验设计
1) 受试者选取
面向社会公开招募22名驾驶员,其中男性19名,女性3名。受试者年龄分布为24岁~62岁,平均年龄38.9岁,实际驾龄为3年~27年,平均驾龄为10.2年。总体上,驾驶员经验丰富,驾龄较长,年龄适中。

图1 模拟道路场景
2) 观测点选取
选取曲线要素点(ZH、QZ、HZ点)作为感知车速观测点。此外,在直线段上增设未看到曲线以及刚看到曲线的点位作为观测点。
根据注视距离与车速的关系[8],当车速为100 km/h时,驾驶员注视点集中在道路前方560 m的位置。将ZH点反向推560 m获取直线段驾驶员刚好看到平曲线的位置Q点桩号,将Q点反向推400 m得到直线段上的另一点P点桩号。感知速度观测点位如图2所示。
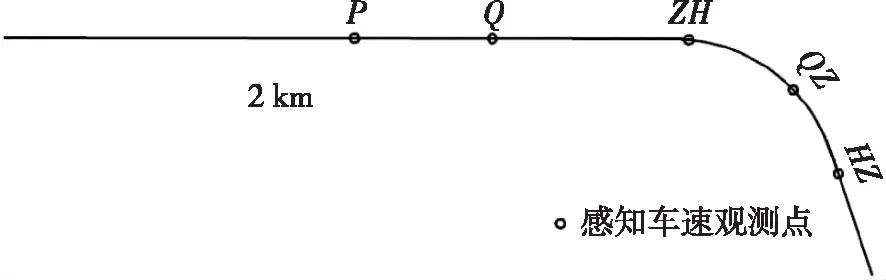
图2 感知车速观测点
3) 试验步骤
(1) 驾驶员熟悉驾驶模拟器的刹车油门、档位位置及基本操作,体验模拟驾驶情况下不同速度的感受。
(2) 遮盖仪表盘,随机打开不同半径的道路模型文件,让驾驶员自由行驶,当车辆到达观测点时,询问其感知车速。
(3) 试验员记录整理观测点位置处的感知车速数据,软件内置插件可实时记录试验段全程实际车速。
(4) 重复步骤(2)~(3),直至驾驶员开完所有试验段为止。
2 数据处理与分析
2.1 分析指标的选取
采用Vp表示感知车速,Vt表示实际车速,定义D为车速感知误差程度值,表达式如下:
(1)
当D<0时,表明驾驶员低估自身车速;当D>0时,表明驾驶员高估自身车速。均值能够反映出感知车速变化的整体趋势,具有较强的抗干扰性而被众多学者作为分析指标[15]。据此,式(1)中实际车速和感知车速均取均值。
2.2 感知速度变化规律
室内试验共获取22位受试者合计550个特征点位的感知车速与实际车速值,将各特征点位的实际速度与感知速度值取均值,统计结果如表1所示。计算各感知车速观测点感知车速误差D,结果如图3所示。

表1 实际车速与感知车速均值

图3 特征点位车速感知误差值
由表1及图3可以看出,各点位感知车速基本都是低于实际车速的。当实际车速增加或降低时,感知车速也会相应变化。车速感知误差D随里程的变化大致呈“U”型。直线上P点车速低估值约为7%,Q点车速低估值有所减小,直缓点ZH车速低估程度达到最大,进入曲线后车速估计准确性逐渐提高。不同半径的平曲线路段直缓点最大低估值为11.57%,最小低估值为10.32%。通过Pearson相关性分析显示,直缓点车速低估程度与半径无显著相关关系(P=0.621,sig=0.263)。出弯处车速低估程度进一步减轻,甚至出现轻微的高估车速,出弯处线形变得缓直,驾驶员普遍存在加速行为,虽然实际行驶速度没有显著提升,但驾驶员可能感觉速度有所增加。
3 实地试验
3.1 试验设计
综合室内外路线设计资料及实地调查情况,在陕西咸旬高速选取线形指标与室内场景基本一致的路段开展实地试验。因室内试验中半径400 m是规范规定的极限指标,而目前高速公路设计指标普遍偏高。因此室外线形指标无法做到与室内一一对应。最终选取试验段指标如表2所示。咸旬高速公路位于银百高速(G69)陕西段北段,双向4车道标准建设,设计速度80 km/h~100 km/h,于2011年建成通车,道路服务水平为一级,交通流为自由流。为保证室内外试验的一致性,邀请参加模拟试验的22名驾驶员参与实地试验。试验车辆选取大众帕萨特,采用USBCAN-OBD数据采集接口及其配套分析软件ECAN Tools,直接解析车辆实时车速、发动机转速等数据。
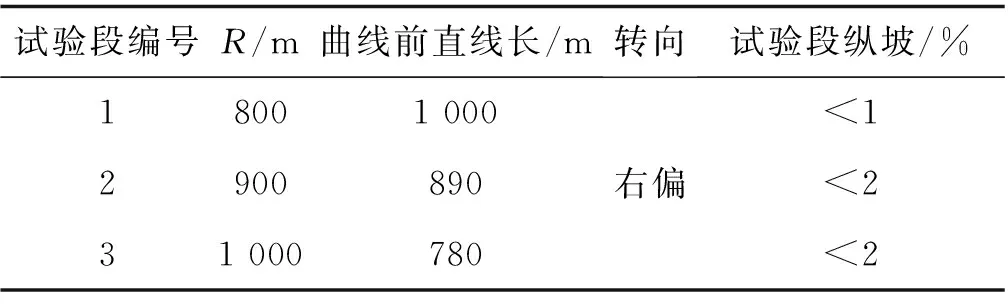
表2 实地试验段线形指标
3.2 数据处理与分析
将感知车速和实际车速数据进行均值化处理,结果如表3所示。计算各点车速感知误差D,结果如图4所示。
由表3及图4可以看出:试验段各点位的感知车速低于实际车速,且二者呈正相关关系。车速感知误差D随里程的变化大致呈“U”型。直线上Q点处车速感知误差约为5%,直缓点ZH车速低估程度达到最大,进入曲线后车速低估程度逐渐减轻。不同半径曲线段直缓点最大低估值为8.25%,最小低估值为6.17%。出弯处车速低估程度进一步减轻,车速估计误差D程度与直线路段相当。
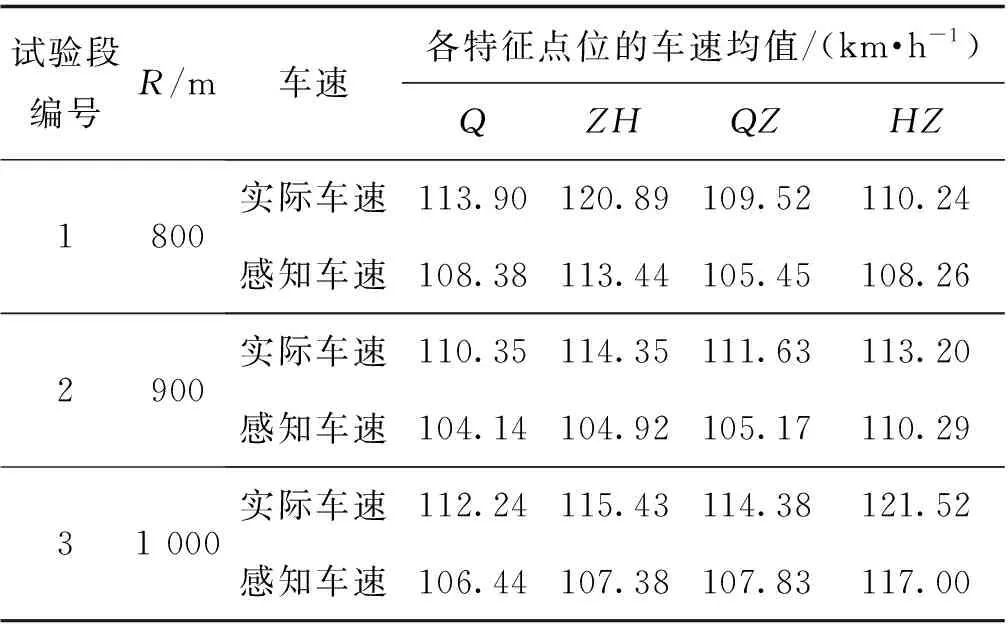
表3 实地试验实际车速与感知车速均值

图4 实地试验特征点车速感知误差
4 室内外数据对比分析
对比室内外数据可以看出:
1) 室内试验与户外试验段车速感知误差随里程的变化规律基本一致。即感知误差与平曲线里程关系大致呈“U”型,直线路段驾驶员对车速有轻微的低估,直缓点ZH车速低估程度有所加剧,经过曲中点QZ后,车速低估程度逐渐减轻。入弯点附近车速低估可能有以下2点原因:(1) 驾驶员一般在进入弯道前会存在减速行为,当平曲线半径较小和车速较高时尤为如此。由于速度惯性的存在,减速后,前一时刻高速运动物体的残留印象会让驾驶员感觉此时视野中物体运动速度变得很慢,此时车速降低不大,但驾驶员却会认为车速降低了很多。(2) 驾驶员视野会随着车速的增加而变窄,使得道路在视野的占比提高。相关数据表明:在双向6车道高速公路上以100 km/h的速度行驶时,路面在视野中所占比例会达到30%,空间占比为50%,公路两侧占比小于20%。当路侧环境单调且车速较高时,公路主体是驾驶员速度感知的重要信息。车辆由直线路段进入曲线时,驾驶员视点前移,道路在视野中的占比减小会使驾驶员对速度产生误判。
2) 户外实地驾驶情形下,直线路段车速低估程度较室内小。直线路段模拟场景下车速低估程度为7%左右,而户外实地试验中车速低估程度为5%左右。这是因为户外环境无法像室内那样进行严格控制,路侧参照物丰富多变,户外实际的车辆驾驶体验一定程度上提高了车速感知的准确性。
5 结论
1) 驾驶员对车速的感知是不准确的,一般情况下会低估车速。通过户外实地驾驶数据分析,可得出路侧环境较单调的4车道高速公路上,直线路段驾驶员会将车速低估5%左右。
2) 曲线入弯点附近是驾驶员车速低估最严重的位置,室内模拟驾驶和户外实地驾驶试验中,曲线入弯点附近车速低估程度分别为11%和7%左右。
3) 不同半径曲线路段,速度感知误差随里程的变化规律基本一致。即曲线入弯点附近车速低估程度最大,经过曲中点后,车速感知准确性逐渐提高。
