无人船与无人机测量在河塘整治项目中应用研究
2022-05-09何燕兰于婷婷王胜利
何燕兰,于婷婷,王胜利
(江苏省地质测绘院,江苏 南京 211102)
1 引 言
随着无人机遥感、倾斜摄影测量、三维激光扫描技术等移动测绘新技术的不断发展和完善,“空天地水”一体化测绘解决方案得到了更为广泛的应用[1]。近年来,山东科技大学、青岛秀山移动测量有限公司、中海达等推出了一系列船载水陆一体化综合测量系统[2],在我国海洋、内陆水域的水电、水利工程中发挥了巨大的作用,但是成本非常高,并且由于集成水平较差,各传感器相对空间位置精度不精确;而且三维激光扫描受有效测程的限制,获取水上地形数据的盲区多;此外水利、水电等工程项目对测绘数据的准确性和时效性需求也越来越高。因此亟须探索出一种水上水下一体化高效测绘的技术方法。
本文针对小型水利水电及河塘改造项目提出一种经济、高效、高精度的水域测量方案,即水上、水下分别采集、处理并通过数据融合得到符合工程要求的三维信息数据。水上工程区域采用无人机倾斜摄影测量方法进行水上地形测量得到对现实世界真实还原的实景模型[3,4],在实景模型中泵站、水闸等水上地形要素清晰可见,且无人机采用云PPK模式进行定位,不需要实时通讯链路、没有时延问题、不受地形影响、定位数据能达到厘米级,得到的倾斜实景模型空间位置信息精度较高。水下区域采用华微3号无人船搭载无验潮RTK单波束测深仪进行水下地形测量能够快速准确反映研究区域水下连续起伏地形特征,既小巧、灵活、安全,又能获得高精度的水下平面位置和高程点坐标,,目前在水下地形图绘制中得到广泛应用[5]。虽然水上与水下是通过不同的技术方式进行地形测量,但是获取的空间位置信息精度都很高,通过坐标系基准的统一能够实现水上水下数据的无缝融合,从而实现水上水下一体化建模,并进而完成河塘整治项目地形和断面图的绘制。经过实际项目验证,该方案对小型水利水电及河塘改造项目具有非常重要的工程应用价值。
2 倾斜摄影测量与无人船测量系统原理
2.1 倾斜摄影测量原理
倾斜摄影测量是在摄影测量基础上发展起来的一项高新技术,从正射摄影发展成从多个角度进行摄影。共线方程如公式(1)是摄影测量学本质的公式,其表达空间物点、像点和摄影中心三点位于一条直线的数学关系,其也是倾斜摄影测量的理论基础。由共线方程可知,内、外方位元素恢复摄影时的摄影光束后,量测立体像对中的同名点的像平面坐标,即可解算出空间物点的坐标。
(1)
式中x,y为像点的像平面坐标;x0,y0,f为影像的内方位元素;XS,YS,ZS为摄影中心的物方空间坐标;XA,YZ,ZA为空间物方点的物方空间坐标;ai,bi,zi(i=1,2,3)为影像的3个外方位角元素组成的9个方向余弦。
本次项目中采用的航测无人机具备厘米级定位精度、记录曝光延迟数据、支持PPK后处理等功能并有惯性传感器系统,能够得到相机曝光瞬间的位置和飞机姿态信息,即外方位元素,而内方位元素则由航测无人机配备的相机决定。同名点的像平面坐标是通过影像密集匹配得到的,但是对于非量测相机,影像密集匹配得到的同名点需要精细畸变改正。高精度的内、外方位元素、严密的影像密集匹配算法、准确的相机畸变参数和相应的地面分辨率,是可以实现 1∶500地形图免像控的。
2.2 无人船测量系统原理
无人船借助高精度GNSS实时定位可根据规划的航线自动采集,同时对场景复杂区域也可进行手动采集。无人船测量系统是整个无人船系统的核心,承担着水深测量和导航定位任务,整个系统的导航定位采用GNSS-RTK动态差分定位原理,如图1所示。水深测量由安置在船上的数字测深仪完成,首先利用换能器将电能转换成声能并向水底发射,当声能以回波的形式从水底返回后,再通过换能器检测回波电能信号并计算出传播时间,最后根据声速和时间计算出水深,在屏幕上显示回波图形。

图1 无人船测量系统原理
3 联合无人船与无人机的测绘案例
3.1 项目概况
项目主体是某农业科学研究院内的两个河塘,位于山脚下农业研究田附近。河塘有非常重要的作用,既能够排涝,有能够保证农业研究田的灌溉用水充足,项目作业范围如图2所示。

图2 项目区域
3.2 数据采集
(1)无人船数据采集
正常情况下,无人船数据采集过程可以实现全部自动化。但是在本项目中,考虑到河塘中水草密布且河塘宽度较窄,采用自动采集和手动采集相结合的方式获取数据,图3为无人船现场作业图。首先,在无人船控制软件AutoPlanner中,规划航线,设置航宽、航线方向等参数;其次在数据采集与处理软件HydroSurvey中新建工程,根据实际项目设置工程名称和坐标系参数;最后执行自动采集。自动采集完成后,手动采集河塘四周复杂区域的水下地形,实现数据全覆盖,然后在HydroSurvey软件的数据处理模块中,进行水深采样,生成htt格式文件,并可以将数据导出为dat格式三维地形文件。

图3 无人船现场作业图
(2)无人机数据采集
本项目利用轻量型无人机对项目区域进行-60°井字飞行,采用云PPK模式进行定位,不需要实时通讯链路,没有时延问题,不受地形影响,定位数据能达到厘米级,并且顾及了曝光延迟[6]。在得到多个角度像片的同时,得到曝光瞬间的精准位置和姿态。
3.3 数据生产及关键技术
在前期踏勘的基础上,采用无人机采集多角度影像,使用专业航空摄影测量软件,经过影像匹配、空中三角测量、生成DSM、纹理映射等过程生成实景三维模型,并将影像匹配得到的密集点云数据导出后与无人船获取的水下三维点云进行数据融合。然后利用实景三维模型、融合后的点云分别进行地形图绘制、水上水下一体的断面图绘制,当数据质量检查合格后,提交最终数据成果。
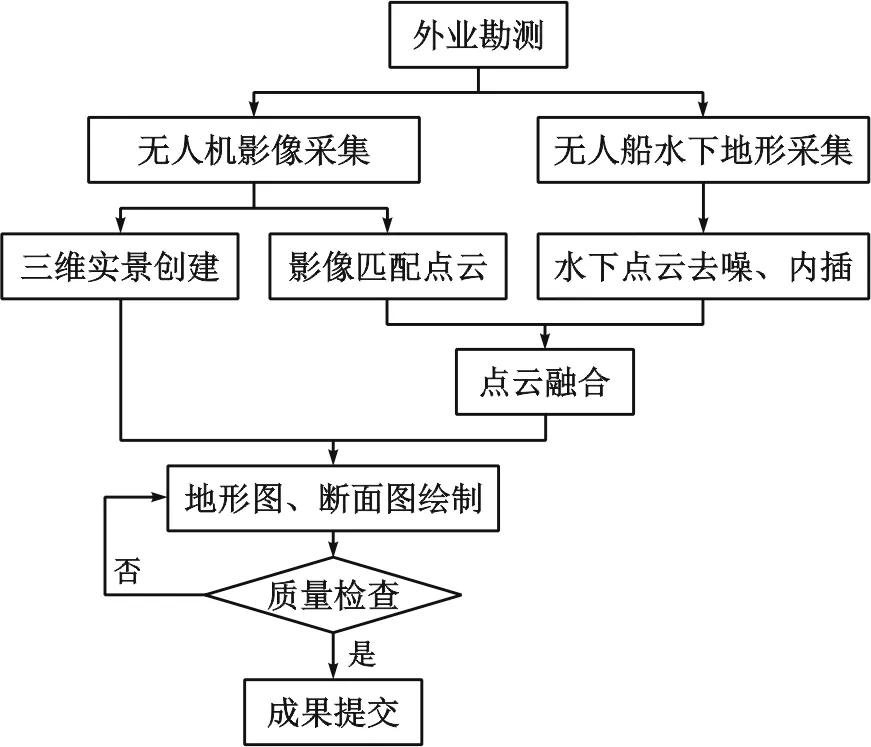
图4 总体流程图
(1)三维实景模型与影像匹配点云制作
采用ContextCapture软件对无人机采集的带有定位信息和畸变信息的影像数据进行影像密集匹配,得到影像匹配密集点云,如图6所示。经过自动生成DSM、纹理映射后得到三维实景模型,如图5所示。在得到的三维实景模型上量取7个检查点坐标与外业采集的检查点坐标进行比较,其结果如表1所示。

图5 三维实景模型

图6 影像匹配点云

倾斜模型标靶残差表 表1
表1显示,点位误差最大为 0.041 m,说明实景三维模型与影像密集匹配点云的精度高。
(2)水下点云制作
无人船进行数据采集时,由于存在水草、渔网等障碍物,采集的数据中有粗差且采集的数据不均匀,如图7所示。无人船采集数据后,在HydroServey软件的数据处理模块中,通过水深采样后,可以导出dat格式三维地形文件,如图8所示。

图7 无人船采集的原始数据

图8 无人船采集的三维地形数据
(3)断面图绘制
河道断面测量是河道地形测量的主要内容,主要包括纵断面测量和横断面测量[7]。在河塘整治项目中断面绘制需要综合水下地形、水面线、护坡、道路、房屋等信息,因此需要融合无人机采集的水上数据和人船采集的水下数据,才能绘制出完整的断面图,如图9所示。最后利用专业点云测图软件,对断面处的点云进行立面显示、绘制和导出,如图10、图11所示。
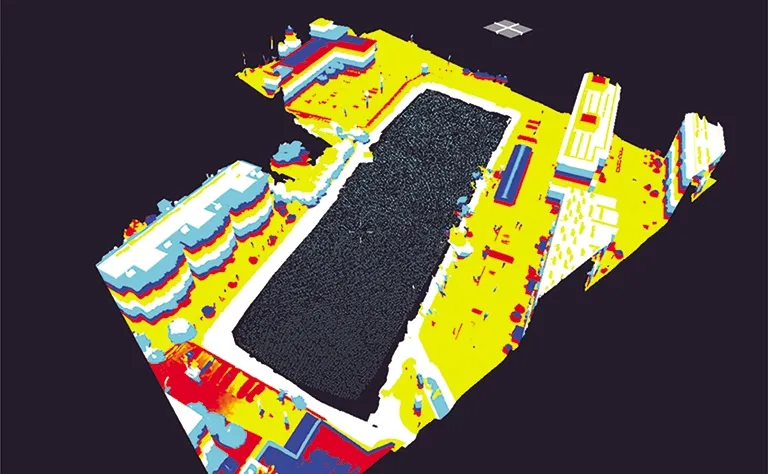
图9 水上水下点云融合

图10 断面处点云立面显示

图11 断面成果图
(4)地形图绘制
在TSD 3DMapper软件中打开实景三维模型,按照《国家基本比例尺地图图式第1部分:1∶500、1∶1 000、1∶2 000地形图图式GB/T 20257.1-2017》规范中 1∶500地形图要求,参照三维模型进行全要素矢量化采集[8],主要包括定位基础、水系、居民地及设施、交通、管线、境界、地貌、植被与土质要素。

图12 基于三维实景模型地形绘制
4 结 论
无人机测量技术结合无人船测量技术在水上水下地形图获取方面潜力巨大,具有灵活、安全、高效的特点,作业效率明显优于传统测量方式。本文通过实际项目,验证了该方法技术路线的可行性,可为无人机、无人船测量在河塘整治、水上水下一体化地形图绘制等领域的应用提供作业参考。
