多种测绘技术对同一土方量算方法研究及精度分析
2022-05-09太浩宇夏永华
太浩宇,夏永华
(1.昆明理工大学国土资源工程学院,云南 昆明 650093;2.云南高校高原山区空间信息测绘技术应用工程研究中心,云南 昆明 650093)
1 引 言
计算机技术的发展为测绘带来了更多的数据收集、提取和处理手段也给我们带来了更多关于土方计算方法的思考[1]。随着测绘技术的不断更新,拥有了多种获取测绘数据的方式方法,在工程建设过程中土方量算的方式变得多种多样。传统的土方测量方法工作量大,不易在计算机上实现,不能有效利用现有的数据[2]。在工程建设过程中土方量算精度是否准确直接关系到工程建设中各方面经济利益,故要确保土方量算的准确性。土方量算中常用的量算方法有DTM(Digital Terrain Model;数字地面模型)法、断面法、方格网法和等高线法,不同的量算方法其量算结果也有差异。DTM法是利用所测土方特征点与高程点构建不规则三角网进行土方量算;数据所建立的不规则三角网模型能更好反映实际地形。断面法主要是将实际地形以某分割路线分割若干横断面,通过计算横断面面积根据菱形体积计算方法量算土方量;断面法更适用于沿纵向延伸及不规则地形土方量算。方格网法是利用一定边长正方形格网对土方量算区域分割,内插计算各格网点高程及差值,通过高差拟合计算每个格网土方填挖方量,总和得到总土方填挖量;其计算相对简单,适用性广泛。等高线法是通过地形特征点形成一组地面高程等值线显示地形,利用相邻两条闭合等高线内插高程所围成的面积与高差计算土方量。DSM(Digital Surface Model)即数字表面模型,它不同于DTM数字地形模型,其包含了地表建筑树木等除地面信息以外的其他特征点信息;对于无人机倾斜摄影测量所建立的三维模型与无人机载激光雷达点云模型实则为数字表面模型,通过对数字表面模型直接范围量算可获取土方量。对土方进行量算时,每种量算方法都有各自的优点和局限性,考虑各方面因素选择合适的量算方法,达到最优的目的[3]。土方量算以外业实测特征离散点坐标为基础,通过建立相关土方计算模型来获取土方量,因此,土方量的计算精度取决于所测量特征点位的精度和密度[4]。本文将对研究区域采用DTM法、方格网法与DSM直接量算法对土方量算及准确性进行分析。
对于土方数据采集,传统采集方式主要是利用RTK(real time kinematic)技术或全站仪人工采集,测绘设备技术不断更新后,基于无人机倾斜摄影测量技术与无人机载激光雷达扫描技术的数据采集迅速兴起。无人机倾斜摄影测量技术以范围广、精度高等方式感知空间地理信息,建立的三维可视化数据更加真实地反映空间地理信息的地理位置、外观、高度等属性特征,从多方位、多角度地对地形地物进行数据采集获取更多三维信息。拥有“全要素、真纹理”的全息表达能力、高精度、丰富的可测性、低成本、高效率等优势[5]。无人机载激光雷达扫描技术通过对不规则、复杂地表进行连续、快速、大面积、非接触扫描,将单站扫描扩展为整体扫描,无人机机载激光雷达扫描技术能将地表上的点、线、面体、地表三维模型等几何数据快速重构出来,可对调查对象的整体变化、细节特征进行详细了解[6]。
2 数据采集
本文以昆明市某高校的场地平整土方量算工程为例进行土方数据外业采集,研究区域平场面积约 7 856 m2平场设计标高为 1 883 m,大部分区域为裸露土地带有零星植被,研究区域现状如图1所示,研究区域分别通过RTK人工测量、无人机倾斜摄影测量与无人机机载激光雷达测量进行数据采集。

图1 研究区域概况及范围线
2.1 人工RTK数据获取
传统土方外业数据获取主要以RTK技术人工测绘的方法进行地形点测量,需测量人员抵达每一个地形特征点,逐点采集获取数据,其工作效率不高,地形特征点密度较低。本研究区域采用中海达RTK在已知3个地面控制点上进行参数校正,对研究区域以 5 m一个地形特征点进行数据采集。
2.2 无人机倾斜摄影数据获取
无人机倾斜摄影测量技术是非接触式的,外业数据采集具有速度快、效率高、精度高、范围大的特点,采集得到的图像分辨率高,经过处理可以生成三维表面模型。研究区域采用DJI PHANTOM 4 PRO消费级无人机对研究区域进行数据采集,外业数据采集流程如图2所示。研究区域共布设了8个像控点,利用RTK以对中杆的形式对像控点进行坐标采集,采用昆明87坐标系。根据研究区域现场情况为满足土方量算精度需求,航线规划步骤中无人机飞行高度设置为 60 m,采用单镜头飞五镜头飞行模式,航向重叠率为90%,旁向重叠率为80%,相机云台俯仰角度正射为90°倾斜为45°,经过对原始影像数据检查筛选出 1 055张影像进行研究区三维模型建立。

图2 无人机外业数据采集流程图
2.3 无人机机载激光雷达数据获取
激光雷达是新型激光传感器。在对地观测领域,其最初目的是为获取高精度数字表面模型。经点云去噪、滤波,获得剔除植被、人工建筑等以后的数字地面模型。与传统的测绘方法相比,激光雷达显示出许多有前途的优点,例如收集高密度和大规模点云的效率高,有利于地形的详细表示[7]。研究区采用华测无人机载激光雷达进行数据采集,并在现场进行采集数据下载、POS数据解算、点云数据解算和坐标转换的预处理,外业数据采集流程如图3所示。

图3 无人机载激光雷达外业数据采集流程图
3 数据处理
3.1 传统数据处理方法
RTK技术人工测绘的土方外业数据采用南方CASS 10.1软件进行土方量算。为了对比不同数据的土方量精度的准确性,采用DTM法与方格网法,边界采样间距以 2.5 m、5 m、10 m和 20 m进行土方量算,量算结果如图4所示。
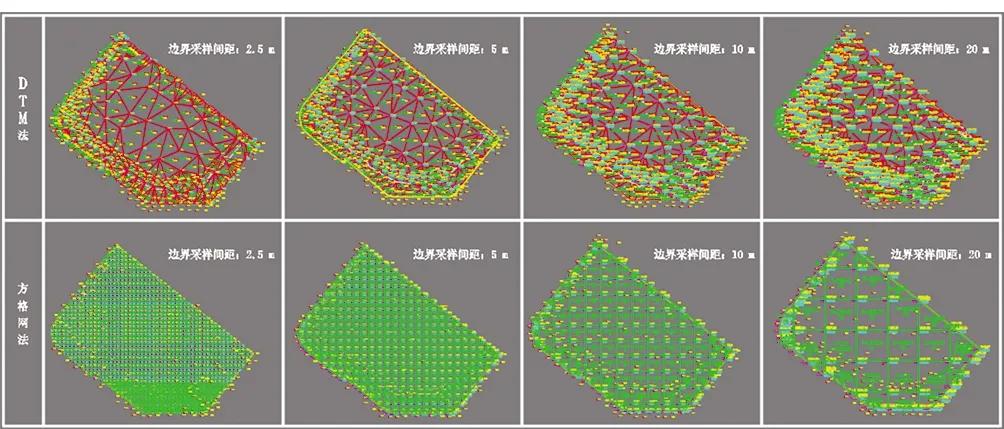
图4 RTK技术人工测绘土方内业数据处理图
3.2 无人机倾斜摄影测量数据处理方法
(1)三维倾斜模型建立
处理无人机航片数据时采用Context Capture软件进行三维倾斜模型建立。Context Capture实景建模软件是一套不需太多人工干预的通过影像自动生成高分辨率的三维模型软件,模型建立可为后续模型修模提供支持。研究区域航片数据导入软件中加载云台相机参数并导入像控点数据进行影像刺点。刺点完成进行空中三角测量如图5所示,其目的是通过测量相应的像控点等像点坐标以解析或数字的形式建立三维立体模型并进行数值解算。解算完成后进行三维模型构建,根据电脑运行内存研究区分为16个瓦片,设置其余参数后生成OSGB与OBJ格式的三维模型如图5所示。

图5 空中三角测量结果(左)与三维模型(右)图
(2)模型土方量算
研究区域三维模型首先采用南方Cass 3D软件进行土方量算。对模型进行地物特征点采集,同人工测绘的方法一致,对研究区域进行DTM法与方格网法的4种边界采样间距土方量算。建立的研究区域三维模型还可采用DSM直接量算法在Context Capture Viewer软件土方量算如图6所示。

图6 DSM直接量算法倾斜模型土方量算
基于倾斜摄影测量技术构建的三维模型中含有悬浮物碎片、植被等地物对DSM直接量算法所得土方量的准确性产生较大干扰,因此利用DP-Modeler软件对研究区域三维模型进行干扰因素如植被的剔除。DP-Modeler模型修饰在OBJ格式三维模型上进行,通过踏平、删除、补洞及贴图等操作,改善维悬浮物、道路凹凸、纹理拉花及水面缺失等问题。在DP-Modeler工程中,首先分别导入OSGB和OBJ格式瓦片数据,然后在OBJ数据上进行模型修饰,完成修饰的OBJ瓦片后再转换成OSGB格式[8]。修改后的三维模型再进行土方量算,模型修改前后如图7所示。

图7 模型植被剔除前(上图)后(下图)对比图
3.3 无人机载激光雷达数据处理方法
对激光雷达数据后处理采用CoProcess华测点云后处理软件,对研究区域数据进行分割删除、噪点处理、压缩采样等。地面点分类是将点云滤除地面以上的地物,如植被建筑物等仅保留地面的点云,是土方量算不可或缺的步骤,处理后点云模型如图8所示。处理后的点云模型可直接进行软件土方量算。

图8 处理后激光雷达点云数据图
处理后的研究区域点云模型还可以输出LAS点云格式,将点云数据导入Context Capture Viewer软件进行OSGB格式的三维模型的建立,建立的研究区域三维模型可采用DSM直接量算法土方量算,量算结果如图9所示。输出后三维模型再在Cass3D软件上,同人工测绘的方法一致,对研究区域进行DTM法与方格网法的4种边界采样间距土方量算。

图9 DSM直接量算法模型土方量算图
4 精度分析
4.1 模型精度检验
在研究区域选取的52个地物地貌特征点对人工测绘、无人机倾斜模型和机载点云生成的三维模型高程数据进行对比分析。根据《工程测量规范》(GB50026-2007)每幅图检测点数不少于20个且均匀分布,其高程中误差公式为:
(1)
式中,Mh为模型的高程中误差(m);n为检查点个数;△hi为检测高程与模型高程较差(m)。其高程残差精度统计图如图10所示。
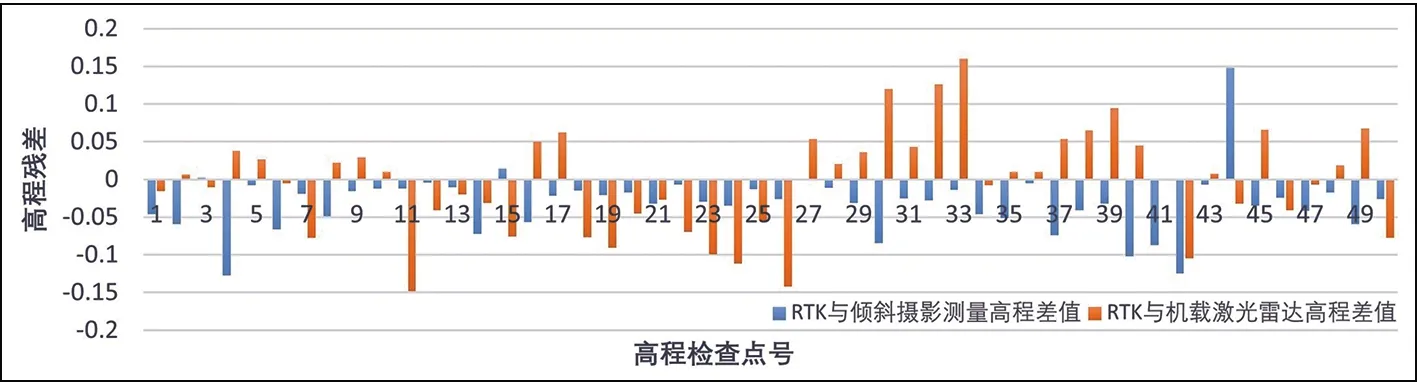
图10 高程残差精度统计图
人工测绘检查数据与无人机倾斜模型数据高程中误差计算得 0.050 016,人工测绘检查数据与机载点云生成的三维模型数据高程中误差计算得 0.065 691;根据GB50026-2007《工程测量规范》数字高程模型格网点的高程中误差限差为1/3hd(hd为基本等高距;一般地区)即研究区域高程中误差限差为0.3,模型精度满足规范要求。
4.2 土方量算精度分析
为分析不同数据采集的数据土方量精度的准确性,通过Cass.10.1Cass3D软件对多种模型进行DTM法与方格网法的4种边界采样间距土方量算,其DTM法量算结果如表1所示,方格网法如表2所示。

DTM法不同边界采样间距土石方量算表 表1

方格网法不同边界采样间距土石方量算表 表2
由量算表格可知DTM法倾斜摄影测量模型最大挖方误差率为1.4%,最大填方误差率为3.5%,机载激光雷达模型最大挖方误差率为0.7%,最大填方误差率为2.2%;方格网法倾斜摄影测量模型最大挖方误差率为1.5%,最大填方误差率为3.3%,机载激光雷达模型最大挖方误差率为1.9%,最大填方误差率为3.9%满足土方量算要求;通过两种土方量算方法看出边界采样间距越小,模型量算越可靠。
而通过DSM模型直接量算法对无人机倾斜模型量算结果挖方量为 23 571.925 m3填方量为 1 923.186 m3,无人机载激光雷达模型量算结果挖方量为 23 537.354 m3,填方量为 1 938.500 m3;对模型进行修饰、植被剔除后,土方直接量算精度可靠。
5 结 论
土方量算在工程建设过程中是必不可少的环节,土方量算精度是否准确直接关系到工程建设中各方面经济利益。本文研究了基于多种测绘技术对同一土方量算方法,探讨了不同数据模型在不同边界采样间距与模型直接量算的土方量算精度的准确性,其中以DTM法所计算的 2.5 m边界采样间距的各类模型土方量算精度最高。通过研究区域土方量算结果看出,基于无人机倾斜摄影测量技术与无人机载激光雷达技术的数据采集比传统数据采集方式其作业迅速,劳动强度低,成本可控。在工程建设过程中以传统技术手段与新兴技术相结合为土方量算提供了高效的数据支撑。
