抽水蓄能电站甩负荷实测数据处理与分析
2022-05-07朱莎莎林雯雯
朱莎莎,杨 光,林雯雯
(1.华北水利水电大学水利学院,河南 郑州 450046;2.河海大学水利水电学院,江苏 南京 210098)
1 概述
20世纪末开始,可持续发展一直是我们国家坚守的战略。随着经济、社会持续稳定且快速发展,对能源的需求量愈来愈大。但我国能源结构复杂,能源利用占比主要以煤炭为主,水能资源位居第二,清洁能源占比仍较少。由于化石能源对于环境的污染巨大,导致温室效应加剧,不利于可持续发展,而水能具有清洁高效、在电网中能调峰、调频、填谷等优点,国家能源局在“十四五”规划提出,要加快抽水蓄能电站建设和新型储能技术规模化应用。随着电子科技和城镇化的发展,电力系统的高峰低谷差值愈来愈大。而电力作为一种特殊的、不可储存的产品,面临着十分严峻的考验[1]。抽水蓄能电站将不可储存的电能转化为水流的势能储存起来,是世界上最重要的大规模储能手段之一,与传统电站相比,更能适应频繁改变需求量的电力市场。但水轮机频繁改变运行工况以适应电力市场日益增长的需求,在偏离设计工况条件下,会历经压力脉动幅值较高的区域运行[2]。抽水蓄能电站水泵水轮机甩负荷过程中产生的压力脉动信号组成成分复杂,而信号采集过程中又会再次受到各种干扰信号的影响,导致采集到的信号难以直观且准确地表明有用的信息。对水泵水轮机的压力脉动信号进行数字信号处理,剥离出其中干扰的噪音或者不相关信息,提取表征水轮机状态的特征参量进行信号分析,可实时监测压力脉动信号;且目前设备维修的方式已经逐步转变为状态检修,而不是过去的定期维修[3],准确判断水轮机运行工况,可以减少事故的发生,还能提高经济性和检修效率。
开始国内外学者运用傅里叶分析处理信号,但学者们发现傅里叶分析适用范围有限,后续又提出了短时傅里叶变换、小波变换等方法,虽然小波变换能处理非线性信号,但一直无法脱离小波基的束缚。而水轮机水道系统中的压力脉动产生原因复杂,为了准确地从压力脉动信号中提取出有用的信号,并及时判断机组运行状态,国内外展开了许多研究。目前较为常用的非线性非平稳信号处理方法包括:经验模态分解、变分模态分解、自适应迭代滤波算法等[4]。1998年,NordenE.Huang等人提出了Hilbert-Huang变换(HHT)[5],这是第一种真正意义上可以处理非线性非平稳信号的信号处理方法。经验模态分解(EMD)为HHT变换第一步,其时频分辨率较高且自适应性较好,但可能会出现模式混叠、端点效应和停止条件等问题[6],适合于分析低频非平稳的水轮机水力压力脉动信号。杨世锡[7]等在2004年提出基于高次样条插值的EMD新算法。2008年NordenE.Huang等人再次提出EEMD方法,在整个时频空间中加入白噪音,再进行足够多的独立测试,促进抗混分解,唯一稳定的即是所需的信号[8]。2014年Dragomiretskiy等[6]提出变分模态分解(VMD),与EMD相比具有更好的自适应能力,能够更加精确有效地揭示整个机组振动的物理学特性。2013年Gilles等提出经验小波变换(EWT)代替EMD分解。2017年于晓东等[9]运用VMD-PE的方法去除压力脉动信号中的噪声,与EEMD相比,去噪效果良好,但自适应性较差,且参数K需提前确定。2018年Xiao-li WANG等[10]基于低噪声会对HHT结果造成很大干扰的问题,提出运用HHT变换和中位值滤波法联合对水轮机尾水管脉动信号进行分析,结果表明,该方法能有效揭示信号的时频特征。2020年赵志炉等[11]提出了ALIF-PE算法,该方法采用自适应迭代滤波算法(ALIF)对信号进行分解,与VMD-PE相比的抗混叠表现更好。
目前的研究大多数都是对抽水蓄能电站压力脉动数据运用滤波算法进行处理,研究内容大多为理论研究,有关工程实际应用方面的内容较少。因此,本论文运用VB.NET语言编写处理水道系统中的压力脉动实测数据的滤波软件,使抽水蓄能电站甩负荷数据处理更加方便快捷,具有较高的理论价值和研究意义。
2 滤波软件程序编程
滤波器可以分为模拟滤波器和数字滤波器。模拟滤波器可以直接处理时间连续、幅值也连续的模拟信号。但模拟滤波器受限于元件,更适合处理高频信号,对于低通滤波要求硬件有较大的电容或电感,经济开销大。而数字滤波器通过计算机A/D转换器实现模拟信号与数字信号的转换,运用数字信号处理器对转换后的数字信号进行处理,再输出相对应的模拟信号,基本运行过程如图1所示。不同于模拟滤波器,数字滤波器增加功能就是增加程序,不受元件误差的影响,经济性好,继承了模拟滤波器的优点,可以同时处理高频和低频信号。

图1 数字滤波器运行流程图
本文利用Visual Studio 2017编写滤波软件,该软件采用可视化(Visual)程序设计,它能让程序设计人员通过拼图的方式来构建各种界面,不再需要为设计界面而编写大量代码,节省了程序设计人员的时间与精力。
2.1 程序编制
滤波算法的滤波过程代码偏长,且需要多次调用,因此定义函数过程,即Function过程,就可以在滤波软件中调用这个函数过程了。调用时通常需要将实际参数传递给形式参数,函数过程利用这些参数进行计算,然后将结果返回。
2.1.1中位值滤波法
中位值滤波法即中值滤波法,是一种经典的非线性信号处理技术,能有效滤除偶发性非周期性波动引发的脉冲信号,常用于滤除温度、液位等慢变量信号,但不适宜处理流量、压力等快变量[12]。中位值滤波法的Function过程中的形式参数为字符串File、十进制数val、二维数组value2(,),其中File代表导入的数据文件;val代表连续采样次数;value2(,)代表存储滤波后数据的二维数组,以子传递。中位值滤波法的Function过程流程图如图2所示。当连续采样次数val值取n时,代码的运行原理分为7步:①判断连续采样次数值是否为奇数,若非奇数,则在原来基础上加1,val为n=n+1,此时假定最开始的n为奇数。②i作为计步器,每读取一行数据时,i=i+1,当i=n时,表明已经读取了n行数据了,可以进行滤波。③采用冒泡排序法,将n个时间点对应的值从小到大排列。④选取最中间的值,将n个时间点的中值,即第(n+1)/2个时间点与之配对,形成一组数据,并赋值给value2。⑤再次读取第i+1行到第i+n行的数据赋值给数组time和value。⑥重新回到步骤3,开始循环。⑦一直到全部数据录入,并处理完毕。
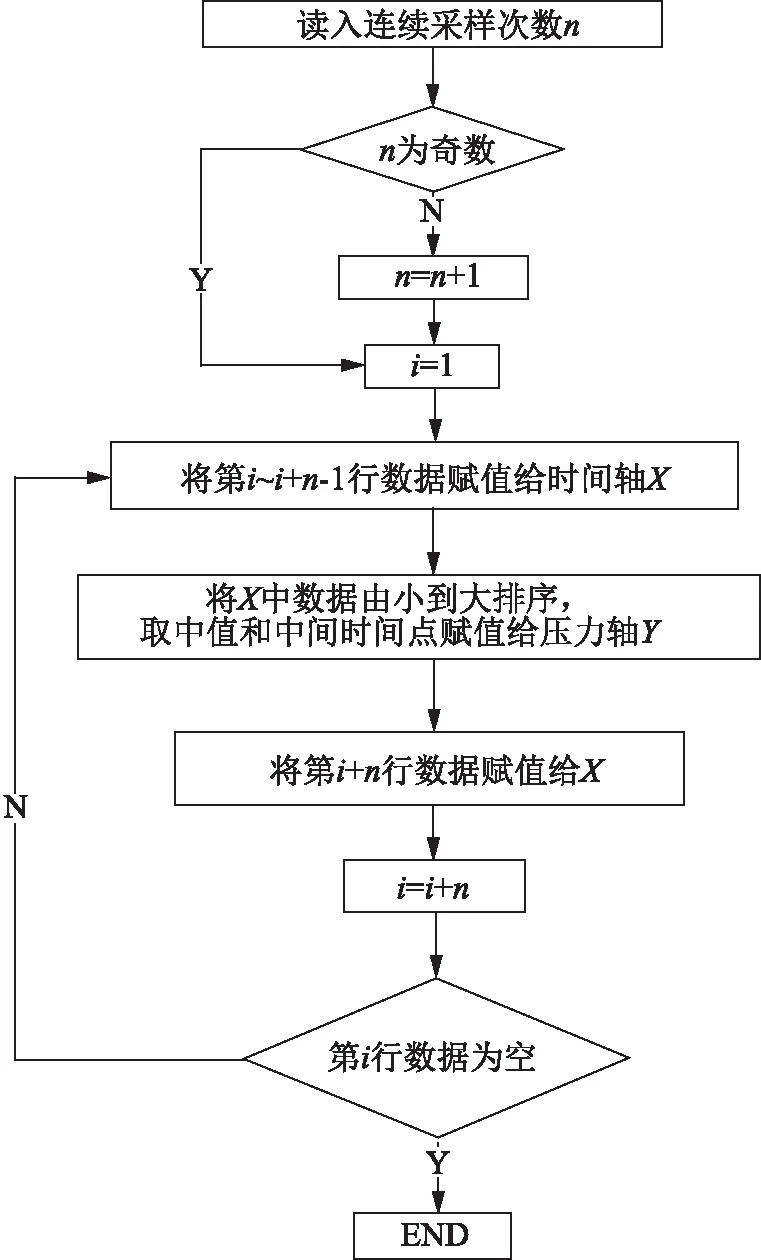
图2 中位值滤波法流程图
2.1.2算数值平均滤波法
算术平均值滤波法,也称算术平均滤波法,适用于对存在周期性干扰进行滤波。这种信号的特点是信号本身在某一数值范围附近上下波动,如测量流量、液位时,但该方法不适用于受到严重脉冲信号干扰的场合。算数值平均滤波法的Function过程中的形式参数其定义与中位值滤波法相同,代码的运行原理不再赘述。其过程流程图如图3所示。
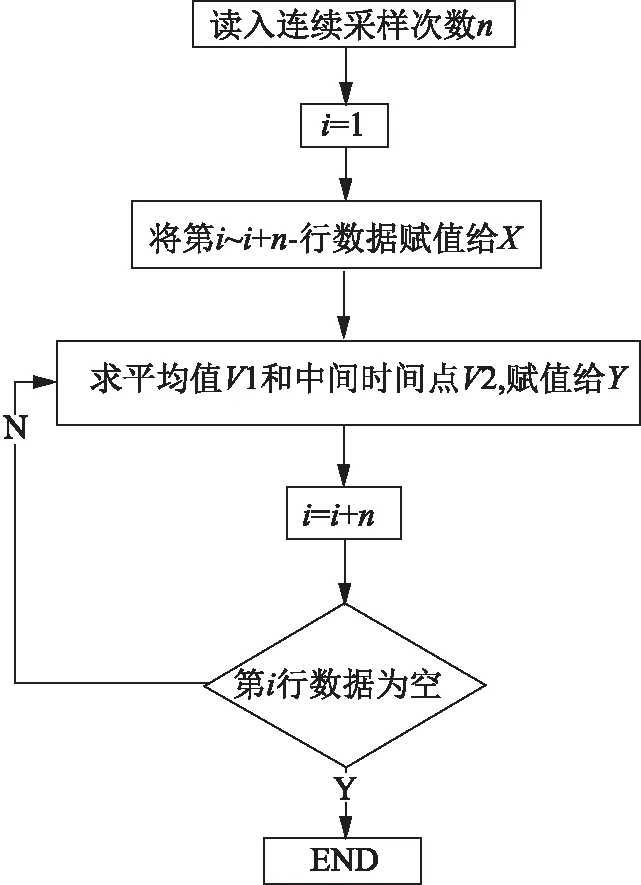
图3 算术平均值滤波法流程图
2.1.3递推平均滤波法
递推平均滤波法是一种低通滤波器。其原理与算数平均值滤波法类似,与其不同的是,递推平均滤波法,每得到一个运算结果时间更短,可以应用于要求较高的实时系统中。递推平均滤波法的Function过程中的形式参数其定义与中位值滤波法、算数平均滤波法相同。代码的运行原理不再赘述。其过程流程图如图4所示。
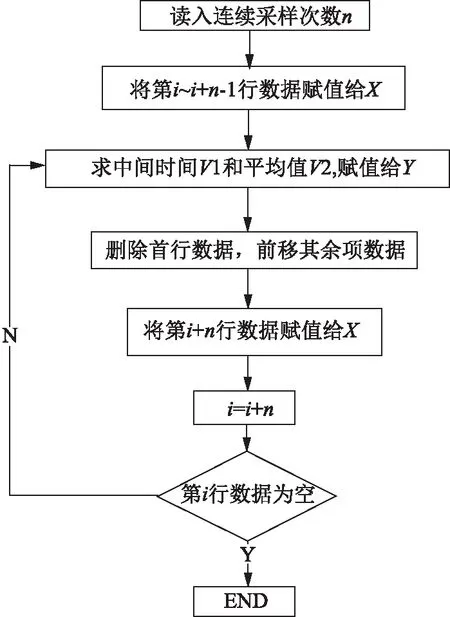
图4 递推平均滤波法流程图
2.1.4经验模态分解
EMD方法本质是通过数据特征时间尺度来获得固有波动模式,然后分解数据。其Function过程命名为E_M_D,形式参数为单精度数组xy(,),单精度数组per_error(,),整型max_iterations,整型base_extremums,单精度数组I_M_F。其中xy(,)代表导入的全部滤波数据,以值传递;per_error(,)代表允许误差,以值传递;max_iterations代表最大迭代次数,以值传递;base_extremums代表基准极值个数,以值传递;I_M_F(,)用来存放IMF函数和最后的残值,以子传递。其过程流程图如图5所示。EMD方法Function过程原理如下:①将输入的全部滤波数据赋值给二维数组h(,)和re_value(,),以便于接下来IMF和残值的运算;②K=1,求出数据的极大值序列和极小值序列,并分别赋值给二维数组xy1(,)和xy2(,);③利用xy1(,)和xy2(,)求出上包络线序列和下包络线序列,并赋值给up_envelopes(,)和down_envelopes(,);④利用up_envelopes(,)和down_envelopes(,)求出上下包络线均值序列并赋值给aver_envelopes(,);使h(,)减去aver_envelopes(,),并赋值给h(,),使之临时存放原数据减去IMF;⑤判断h(,)是否满足约束条件,若满足继续下一条,若不满足跳转到步骤2,K值加1;⑥将h(,)赋值给存放IMF函数的数组I_M_F(,);⑦将re_value(,)减去I_M_F(,),并赋值给re_value(,),并判断残值是否为单调函数,若不为单调函数则继续迭代,直到最大迭代次数或者残值称为单调函数;⑧若残值为单调函数,则将此赋值给I_M_F(,),至此,EMD方法完成。
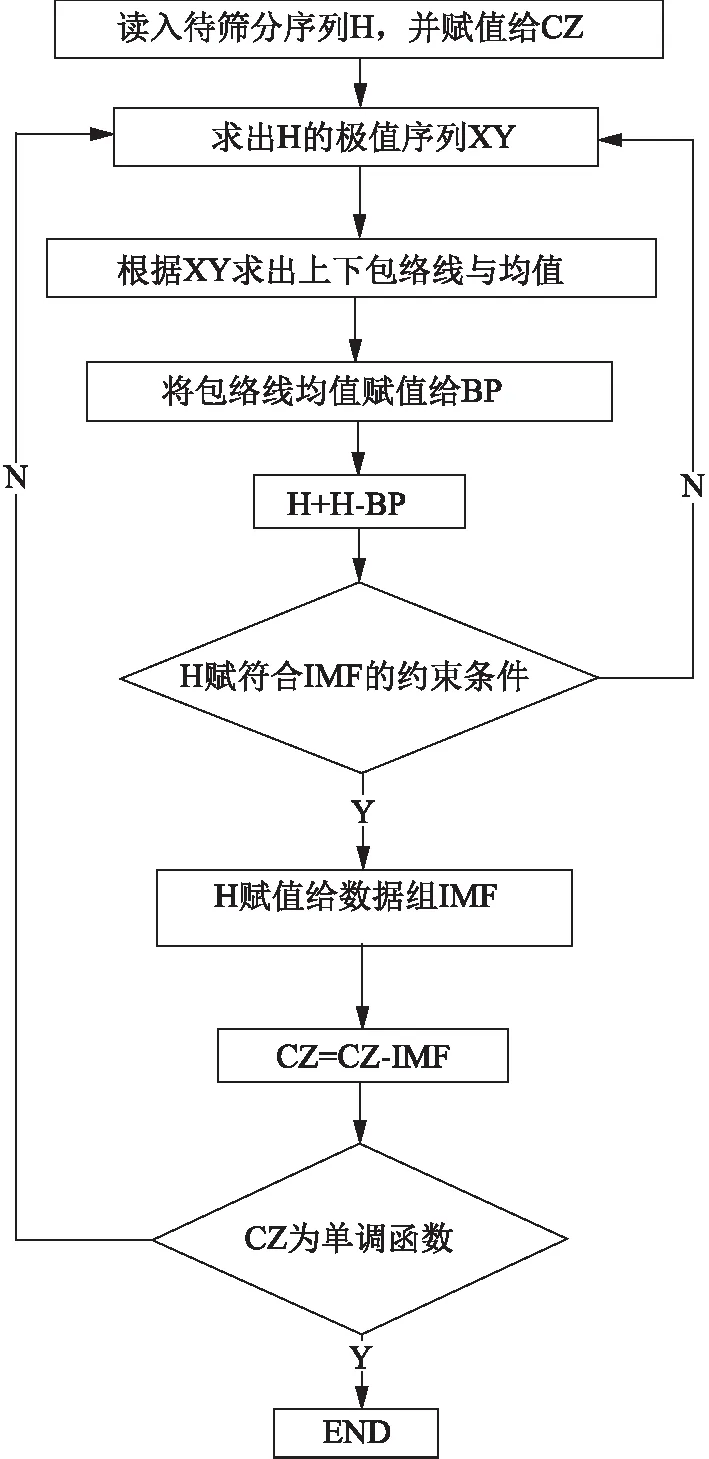
图5 EMD方法流程图
2.2 代码运行过程
(1)导入文件。单击“浏览”文本框,则该文本框的click事件启动,清除滤波前后波形数据文件,运用StreamReader读取原数据文件。
(2)图像显示。该过程引用次数多,故而定义一个Function过程,命名为draw()。在导入文件、滤波后都会将图像显示在Chart1中。滤波前数据波形为Series(0),滤波后数据波形为Series(1),数据的时间由x轴表示,压力值由y轴表示。
(3)数据处理。选取“滤波算法”单选框,其对应的控制参数“允许最大偏差值”的文本框显现,其余不相干的参数的Visible变为False,其界面显示如图6所示。
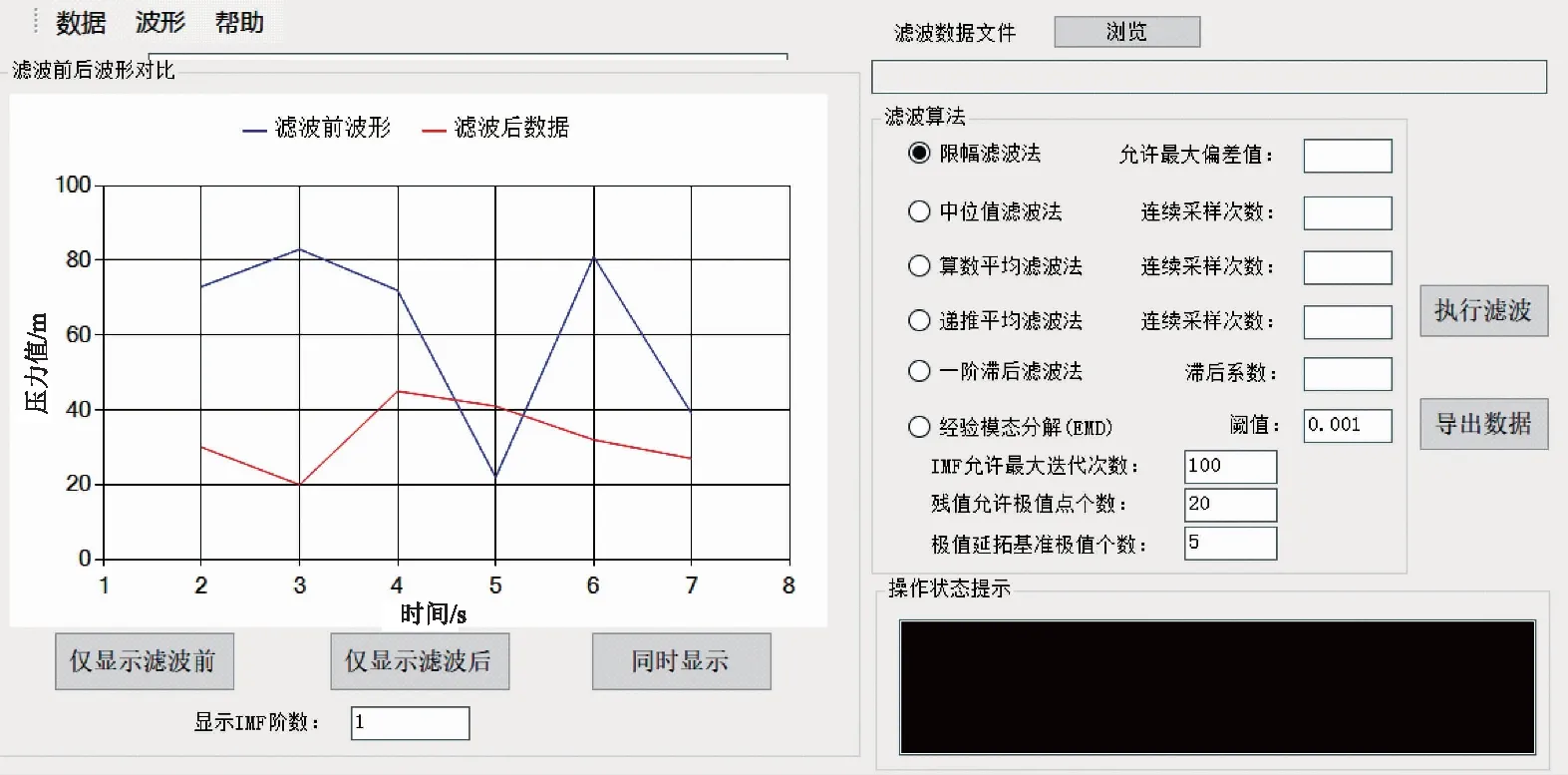
图6 限幅滤波法界面
(4)单击“导出”文本框,输出滤波后数据文件,新建一个csv文件,在数据处理的Function过程中,添加一段append代码,在不清空已录入数据的基础上,录入下一行数据。
3 数据分析与分析
3.1 试验数据分析
某抽水蓄能电站采用混流式水泵水轮机,其压力脉动主要来源见表1[13]。

表1 水泵水轮机压力脉动主要来源表
(1)运用中位值滤波法进行分析时,连续采样次数分别选取5、50、100次,结果如图7所示。由滤波后的波形可以看出,在连续采样次数达到50次后,大约在1405s处出现的尖峰脉冲干扰信号被过滤,曲线随着连续采样次数的增多,平滑度越高,但灵敏度越低。例如,连续采样次数为5和50次的图中在大约580s处出现的局部极小值,在连续采样次数为100次的图中被过滤了,但也有可能与波形显示框精度较低有关。
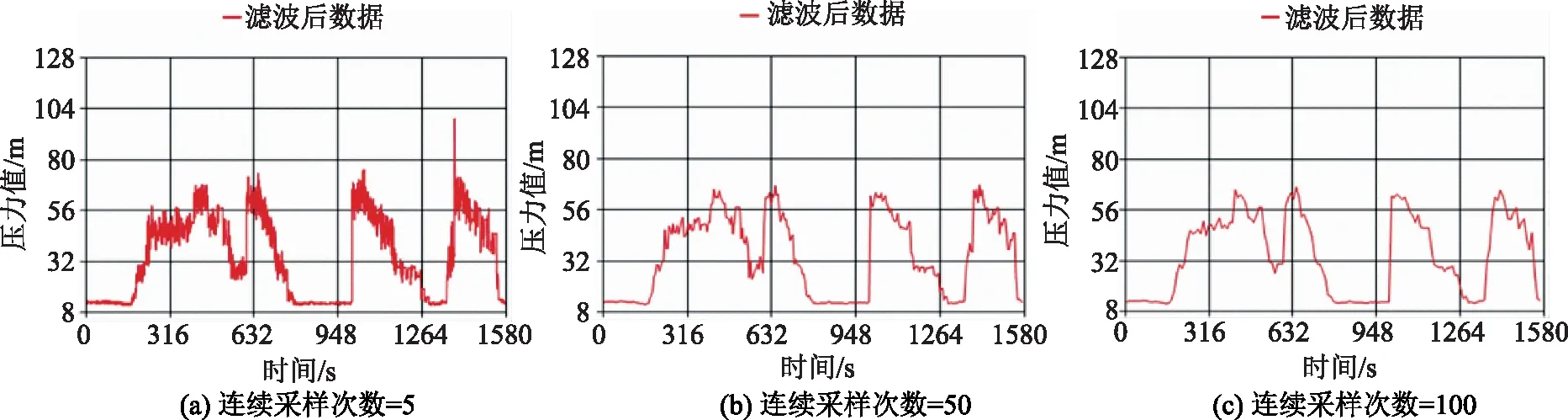
图7 中位值滤波法
(2)运用算数平均滤波法进行分析时,连续采样次数分别选取5、50、100次,结果如图8所示。由滤波后波形可以看出,曲线随着连续采样次数增多平滑度越高;大约在1405s处出现的尖峰信号幅值越来越小,直到连续采样次数达到100次时,尖峰信号完全被过滤;大约在580s处出现的局部极小值并没有完全消失,说明滤波精度较好。
图8 算数平均滤波法
(3)运用递推平均滤波法进行分析时,连续采样次数分别选取5、50、200次,结果如图9所示。由滤波后的波形可以看出,曲线平滑度随着连续采样次数的增多而愈来愈高,连续采样次数达到200次时,锯齿状波形基本消失,260~470s和1440~1540s锯齿状波形较明显;大约在1405s处出现的尖峰信号幅值越来越小,直到连续采样次数达到200次时,尖峰信号仍然没有被完全被过滤,还存在一定幅值;大约第505s处和第605s处出现的局部极小值并没有随着采样次数的增多而消失。
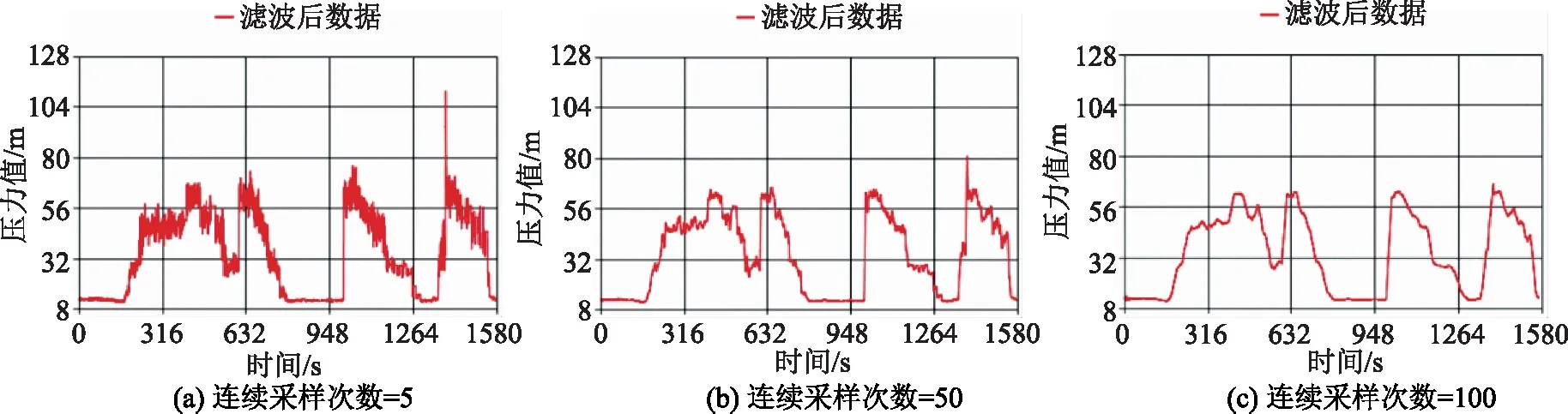
图9 递推平均滤波法
(4)运用EMD方法进行分析时,先对仿真信号进行EMD分解。仿真信号由一个幅值为10Pa、频率为2Hz信号和一个幅值为5Pa、频率为10Hz信号组成,阙值取0.001,IMF允许最大迭代次数取5次,残值允许极值点个数取10个,极值延拓基准极值个数取5个,分解出的IMF如图10所示,可以分析出;IMF最大阶数为2,EMD方法分解出IMF1为10Hz的信号,IMF2为2Hz的信号,排列顺序是由频率从高到低排列。但是在第4s处信号分解,存在一定问题,这是程序需要改进的地方。
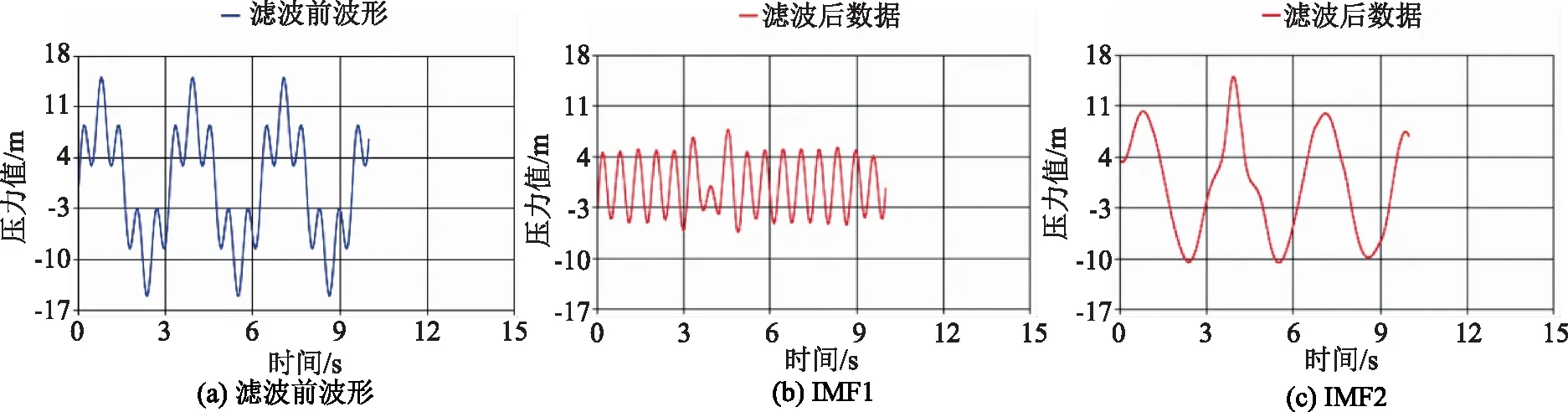
图10 仿真信号EMD分解
对实测信号进行分析,阙值取0.001,IMF允许最大迭代次数取5次,残值允许极值点个数取10个,极值延拓基准极值个数取5个。滤波前波形与分解结果如图11所示。
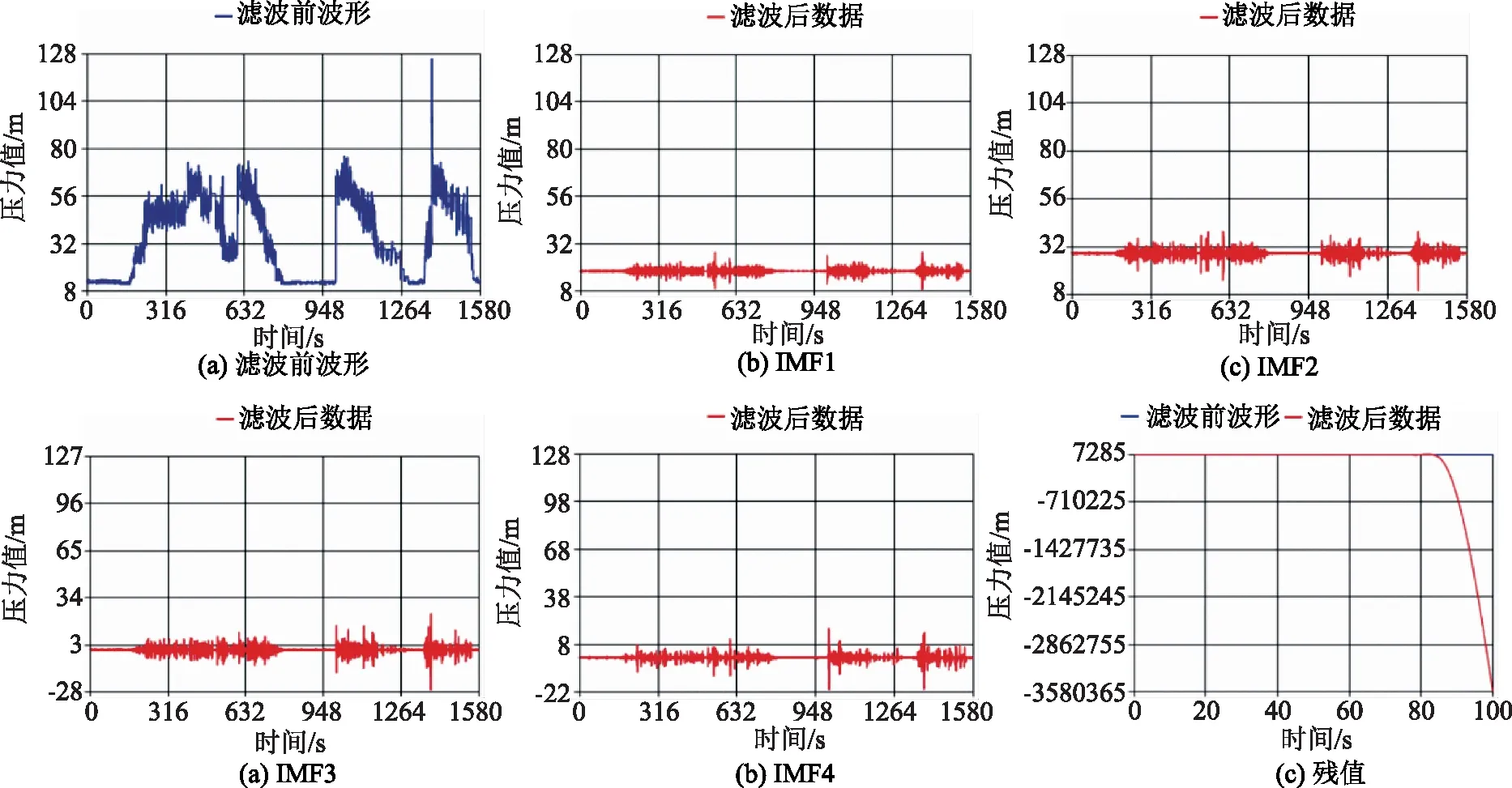
图11 实测信号EMD分解
由分解出来的IMF可知,最大IMF阶数为8,只显示具有一定物理意义的单分量信号IMF1-IMF4,剩下的为残值,不具任何意义。该分解过程只是将复杂的尾水管进口处压力脉动信号在一定特征尺度下分离,得到的单分量信号只具有一定的物理意义,但无法得出能够体现水轮机压力脉动信号的特征[14],需要进行傅里叶变换或者希尔伯特变换。该程序目前无法提取出各IMF分量,因此,仍然需要进一步改进。
3.2 单机甩负荷试验滤波结果分析
工程实际中为了机组的安全,施工人员比较关注尾水管进口最大/小压力、以及最大转速的上升率等。即需要对抽水蓄能电站的滤波结果进行修正,确保工程的安全性。
仙居抽水蓄能电站位于浙东南中心地带仙居县境内,电站设计安装4台单机容量375MW的可逆式抽水蓄能机组,总装机容量1500MW,年发电量25.125亿度,年抽水耗电量34.5亿度。在连续采样次数为100次的情况下,运用中位值滤波法、算数平均滤波法以及递推平均滤波法对机组实测数据进行滤波,根据机组单机甩负荷试验情况,进行实测与滤波后结果分析,根据实测数据与滤波后数据进行对比得到最值差值和压力脉动修正值,并比较3种滤波法的结果。
3.2.1尾水管压力对比
不同工况时尾水管进口压力滤波后波形对比、甩负荷试验水位组合表及尾水管进口最大/小压力数据如图12—13及表2—4所示,其中,计算误差和压力脉动修正值采用“(滤波后数据-试验实测值)/甩前净水头”确定。
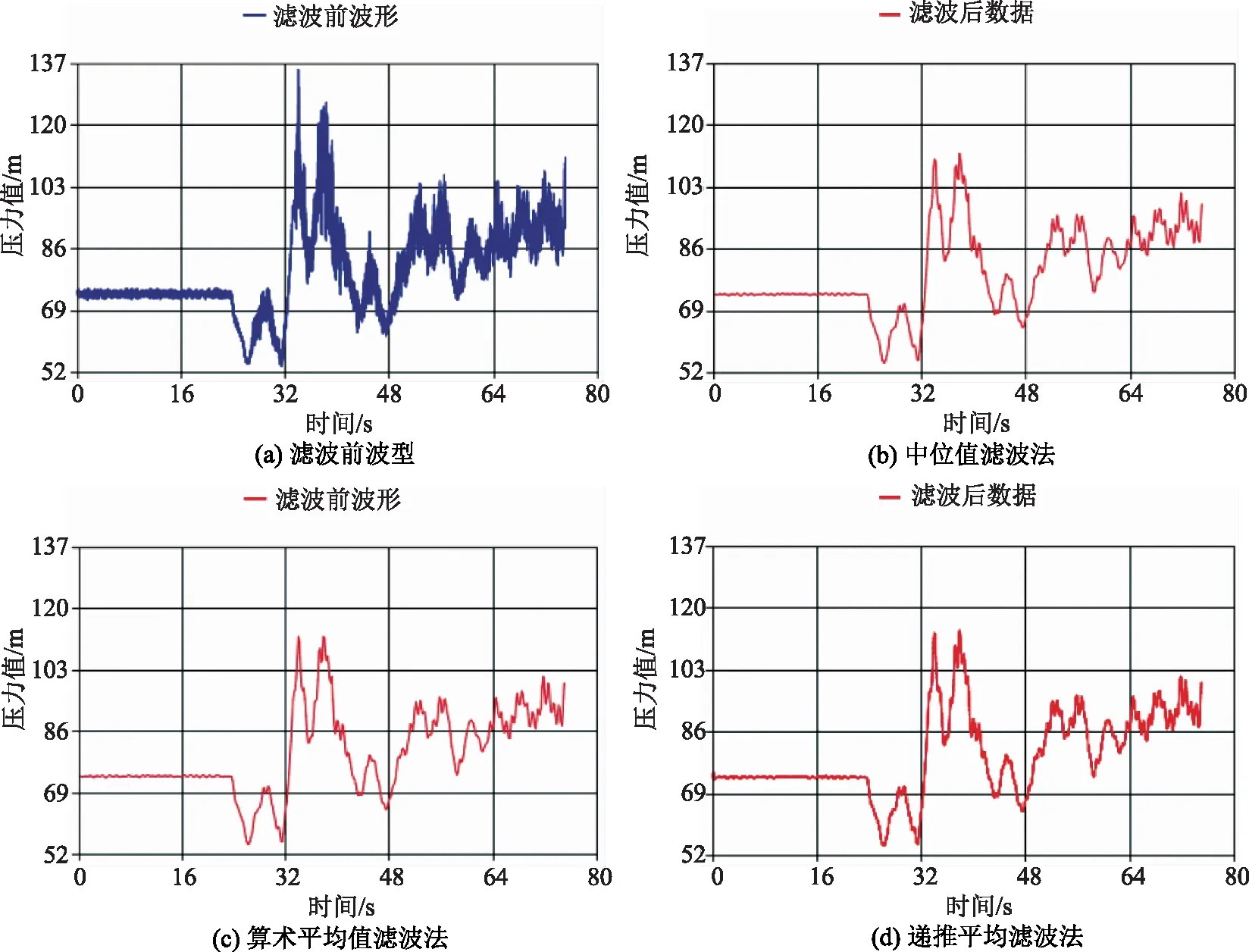
图12 甩100%负荷工况下尾水管进口压力的滤波前后图形
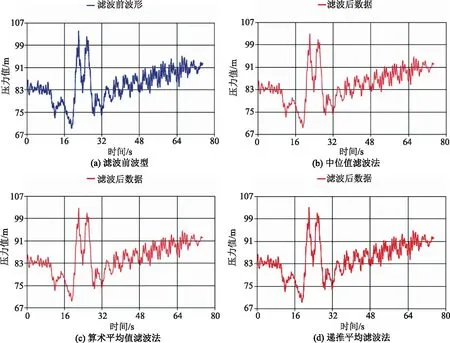
图13 甩50%负荷工况下尾水管进口压力的滤波前后图形

表2 单机甩负荷试验工况水位组合表

表3 尾水管进口最大/小压力实测值与滤波后极值对比 单位:m
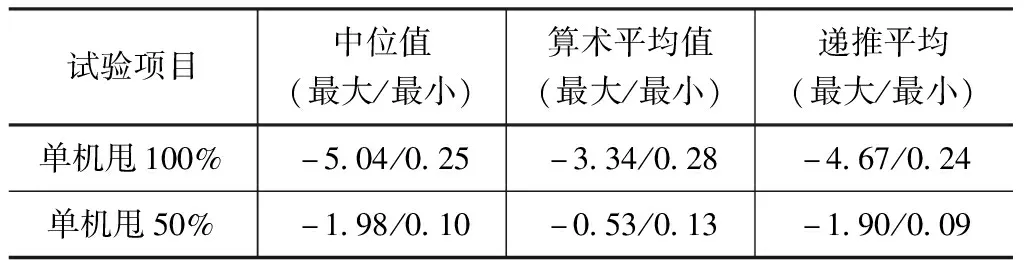
表4 尾水管进口最大/小压力相对差值表 单位:%
3.2.2数据分析
为确保工程的安全性,需要对仙居电站可能发生的极端控制性工况进行复核计算,并对计算结果进行修正,修正按照已有的试验工况按照最不利情况进行修正。修正后特征参量取值见表5—6。

表5 各个特征参数修正原则 单位:%
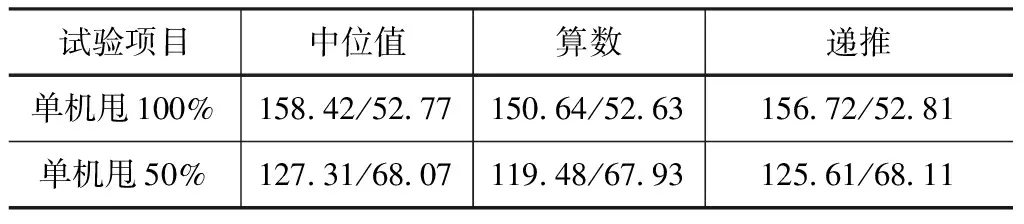
表6 尾水管进口最大/小压力修正后特征参数表 单位:m
通过对单机甩负荷试验与滤波后数据对比分析可知:单机100%、50%甩负荷工况尾水管进口最大压力的试验和不同滤波法滤波后数据结果相对差值绝对值对比可知中位值滤波法>递推平均滤波法>算术平均值滤波法,最小压力相对差值对比结果可知算术平均值滤波法>中位值滤波法>递推平均滤波法。
4 结语
本文运用VB.NET语言编写滤波软件,该软件将传统滤波和EMD方法结合在一起,可以实现滤波前后波形对比以及提取滤波后信号等功能。并且不需要用户具备深厚的数学知识,只需要简单输入数据和参数,即可得到想要的滤波结果。针对过滤影响工程安全的最值的问题,发现中位值滤波法对最大压力的过滤程度最好,算数平均值对最小压力的过滤程度最好。进行滤波处理时,传统滤波法能较好地过滤尖峰脉冲信号和噪声,并对极值点有较好地保留;但随着控制参量愈来愈大,滤波后波形愈来愈平滑,但灵敏度越来越低。经验模态分解可以提取出具有物理意义的IMF分量,但需要进一步转换才有意义,且有运行速度慢、数据精度低等缺陷。后续可以将EMD方法的算法进一步优化改进。
