基于EnKF的湘江流域多源遥感土壤水分数据分析
2022-05-07王雨诗闵馨童夏晨庆
王雨诗,闵馨童,王 成,夏晨庆,朱 仟
(东南大学土木工程学院,211189,南京)
土壤水分参与生物圈中地表与大气能量、物质与水分的交换,能够控制地表径流走向,植物含水量等,在气候系统调节中起着重要作用。同时,农作物所受水分胁迫的程度也与土壤水分含量密切相关[1]。土壤水分可以在一定程度上反映水土保持措施的影响及有效性,因此获取可靠的土壤水分数据通常被视为水土保持工作中的关键步骤。
遥感技术因具有分辨高,覆盖范围广,时间跨度长等优点而被广泛地用来获取土壤水分数据[2-3]。较为常用的一些遥感土壤水分数据包括:SMAP (soil moisture active passive)、ASCAT(advanced scatterometer)、AMSR2(advanced microwave scanning radiometer 2)和SMOS (the ESA soil moisture/ocean salinity mission)的反演土壤水分数据[4-5]。目前SMAP、ASCAT和ASMR2等提供的土壤水分数据与实测数据有良好的一致性,在大部分地区适用性较高,表现出较好的准确性和可靠性[6-11],但也因受到观测误差、样本不确定性和表面土壤水分反演算法的影响而显示出不同的性能[12-13];因此融合不同来源的遥感土壤水分数据被认为是获得高精度土壤水分数据的可靠方法[14]。
数据融合是集合多源数据并筛除无关信息的过程,融合后的数据往往具有更高完整性、准确性和及时性[15-16]。数据融合算法中有些经典算法一直被广泛地运用于各种数据的处理,如HIS变换法、高通滤波法、比值加权法、主成分分析法、集合卡尔曼滤波算法(Ensemble Kalman Filter,EnKF)等[15]。EnKF作为最常用的融合方法之一,被广泛运用于遥感土壤水分的融合中[16]。如高健等[17]利用EnKF实现对内蒙古地区10 cm多源土壤水分数据的融合。曹炯玮等[18]利用EnKF对柴达木盆地AMSR-E和ASCAT 2种遥感土壤水分数据进行融合。研究表明,基于EnKF融合后的数据集不仅分辨率得到较大提升[19],还可以有效提高参数推估的效果[20],可为多源异步数据的融合提供新的解决方案[17]。由于国内对EnKF的研究起步较晚[21],且SMAP作为新型遥感土壤水分产品,被用于遥感数据融合方面的研究还比较少;因此,利用EnKF融合SMAP及其他遥感土壤水分数据具有很大的研究价值。
笔者选取SMAP、ASCAT和AMSR2遥感产品提供的土壤水分数据,通过评估其在湘江流域上的表现,并采用EnKF方法对其中精度较高的遥感数据集进行数据融合,从而得到更高精度的土壤水分数据。
1 研究区概况
湘江流域(E 110°~114°,N 24.5°~28.5°)位于中国南部,地貌类型以山地、丘陵为主(图1)。湘江流域属太平洋季风湿润气候,春夏多雨,秋冬干旱。湘江流域多年平均气温为17 ℃,多年平均降水量在1 400~1 700 mm[22-23],降雨主要集中在4—9月。因降雨不均,湘江流域旱涝灾害频发[23]。

ASCAT:Advanced scatterometer.SMAP:Soil moisture active passive,AMSR2:Advanced microwave scanning radiometer 2.DEM:Digital elevation model.The same below.图1 湘江流域DEM数据及ASCAT,SMAP和AMSR2遥感产品格点空间分布Fig.1 DEM data and spatial distribution of ASCAT,SMAP and AMSR2 remote sensing products in the Xiang River basin
2 数据与方法
笔者选取3个遥感土壤水分数据集,即SMAP、AMSR2和ASCAT反演土壤水分数据,遥感数据集的基本信息见表1。另外,笔者选取CLSMDAS (China land soil moisture data assimilation system)数据为参考数据。

表1 SMAP、AMSR2及ASCAT土壤水分产品Tab.1 Soil moisture products of SMAP,AMSR2 and ASCAT
2.1 SMAP反演土壤水分数据
SMAP卫星于2015年1月成功发射,主要任务是获取高精度的土壤水分数据信息[24]。该卫星具有近极地太阳同步轨道,可在3、9和36 km处提供不同分辨率的土壤水分数据[25]。笔者选取SMAP L2 Radiometer Half-Orbit 36 km EASE-Grid Soil Moisture V006产品数据。该产品可提供36 km分辨率每日的表层土壤水分数据(https://earthdata.nasa.gov/)。笔者利用反距离插值法将该数据插值为0.25°×0.25°空间分辨率。
2.2 ASCAT反演土壤水分数据
ASCAT是搭载在欧洲气象业务卫星MetOp-A上的微波散射计,由欧洲气象卫星组织(EUMETSAT)开发,并于2006年10月投入使用[26]。笔者选用Soil Moisture at 25 km Swath Grid in NRT-Metop产品数据,其所有数据均来自欧洲气象卫星网站(https://www.eumetsat.int/)。ASCAT数据初始空间分辨率为25 km,时间分辨率为1 d。笔者采用反距离插值法将数据空间分辨率处理为0.25°。
2.3 AMSR2反演土壤水分数据
GCOM-W1平台上的AMSR2传感器于2012年5月发射,是日本宇宙航空研究开发机构(JAXA)与NASA合作开发的1种无源微波遥感仪器[5,8]。笔者选取GCOM-W/AMSR2 L3-Soil Moisture Content_0.25deg产品数据,其所有数据均来自日本航空网站G-Pertal(https://gportal.jaxa.jp/gpr/search?tab=1)。
2.4 CLSMDAS产品数据集
中国区域陆面土壤湿度数据融合系统CLSMDAS基于多源地面和卫星观测数据,可提供覆盖亚洲区域(E 60°~160°,N 0~65°),空间分辨率为0.062 5°,时间分辨率为1 d的包括土壤水分在内的多种变量的数据[5]。由于未能获取到湘江流域的实测数据,笔者选用该产品中日尺度0~5 cm深的土壤水分数据作为参考数据。该数据集已基于中国土壤水分自动监测站的观测数据进行评估。结果表明,该产品在中国区域内的质量较高(http://data.cma.cn/data/cdcdetail/dataCode/NAFP_CLDAS2.0_RT.html)。在中国的区域内,CLSMDAS与观测值之间的平均相关系数为0.89,均方根误差为0.02 m3/m3,偏差为0.01 m3/m3。该数据已被广泛用于干旱监测中,并被证明可作为参考数据[22,27-28]。笔者对其进行升尺度至0.25°以与遥感数据集相比较。
笔者选取SMAP、ASCAT和AMSR2土壤水分产品,评估其在2017年4月至2019年10月时段在湘江流域的表现;然后根据评估结果选取出精度较高的产品,使用EnKF算法对其进行融合;最后利用CLSMDAS参考数据评估融合后数据集的精度,验证EnKF算法在数据融合中的有效性。
2.5 EnKF数据融合
EnKF是Evensen[29]根据Epstein的随机动态预报理论提出的通过总体积分法来计算状态,从而预报误差协方差的1种数据同化算法[5],被广泛应用于水文学和气象学的数据融合研究中。EnKF算法包括2个步骤:预测和更新。具体实现过程为:通过模型向前积分,整合新的观测数据,得到1组分析场集合,然后通过卡尔曼滤波方程来更新集合[30];更新后的集合作为下一个时刻的背景场,继续向前作短期预报,与下一个时刻的新观测数据融合,以此类推,循环到最后。
其非线性的过程如下:
Xt+1=F(Xt)+Wt(N(0,G));
(1)
Yt=H(Xt)+Vt(N(0,G))。
(2)
式中:Xt为状态变量;F为模型算子,将t时刻的状态Xt映射到t+1时刻的状态Xt+1;H为将状态转换为观测值的测量算子;Wt(N(0,G))和Vt(N(0,G))分别为过程和测量噪声;假定Wt和Vt是独立的白噪声和具有正态概率分布的白噪声;Q和G分别是过程噪声协方差矩阵和观测噪声协方差矩阵,且被假定为常数。
笔者采用EnKF来实现数据融合的具体实现过程为:1)分析遥感产品数据集的离散程度得到扰动因子;2)使用上述扰动因子对遥感土壤水分数据进行扰动,以得到不同的模型初始变量;3)将2个数据集分别作为模型状态变量(Y)和观测值(Z),进行数据融合。
2.6 评估指标
对于遥感土壤水分产品的评估采用相关系数(R),乖离率(BIAS),均方根误差(RMSE)和无偏均方根误差(ubRMSE)评估指标。4种评估指标计算公式如下:
(3)
(4)
(5)
(6)

3 结果与分析
3.1 遥感土壤水分数据评估
笔者从网格尺度和流域尺度,以CLSMDAS为参考数据集,评估3种遥感土壤水分产品在湘江流域的表现。在网格尺度上,由ASCAT、SMAP、AMSR2和融合土壤水分数据集评估指标R、BIAS、RMSE和ubRMSE在湘江流域上的空间分布(图2)可得,与其他2种遥感数据相比,SMAP在空间上与参考数据集有最高的相关性,湘江流域90%格点的R值>0.6。且其RMSE值和ubRMSE值均较小:对于RMSE值,所有格点均处于0.1 m3/m3以下;对于ubRMSE值,只有1%的格点高于0.2 m3/m3。而BIAS值在格点尺度上偏高,具体表现为在中部高程较小的区域内呈现高估,而在流域边缘的高程较大的区域内呈现低估。总体而言,有58%的格点相对偏差在-10%~10%。ASCAT在所有格点R值都<0.5,明显低于SMAP,但其余评估指标均表现较好。所有格点RMSE值均<0.09 m3/m3,且ubRMSE值则均<0.18 m3/m3。在BIAS值上比SMAP表现更优,有93%格点的BIAS处于-10%~10%的区间范围内。而AMSR2的4种指标表现均较差,与参考数据集的相关性较低,RMSE值与ubRMSE值分别在0.1和0.3 m3/m3以上,且在所有格点上都表现出对土壤水分极大的低估。
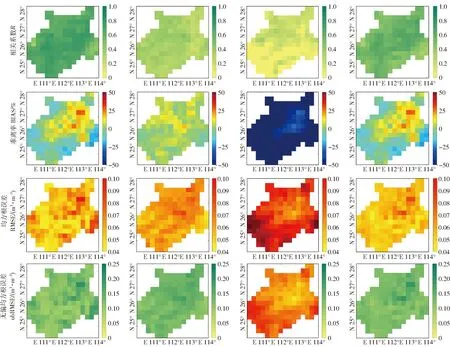
R:correlation coefficient.BIAS:relative bias.RMSE:root mean squared error.ubRMSE:unbiased root mean squared error.The same below.图2 ASCAT、SMAP、AMSR2和融合土壤水分数据集评估指标R、BIAS、RMSE和ubRMSE在湘江流域上的空间分布Fig.2 Spatial distribution of evaluation indices (R,BIAS,RMSE and ubRMSE)of ASCAT,SMAP,AMSR2 and fusion soil moisture datasets in the Xiang River basin
在流域尺度上,通过计算3种遥感土壤水分数据集和CLSMDAS参考数据集在流域上的平均值,得到各个产品和CLSMDAS土壤水分数据的时间序列图(图3)。在湘江流域上,SMAP可以很好地捕捉到参考土壤水分数据在时间上的变化,相关性较高(R=0.770),且BIAS值、RMSE值和ubRMSE值较小(表2),数据集表现出较高的精度。但其在2019年8月至10月存在个别极大高估土壤水分的离群值,这可能是由反演误差导致的。ASCAT呈现出的土壤水分变化波动较小,总体波动范围与参考数据集一致,整体精度较高,其评估指标值的表现略次于SMAP。AMSR2的表现最差,与参考数据集的相关性很低,呈现出对参考数据集的严重低估,其无法捕捉到土壤水分的时间动态变化。
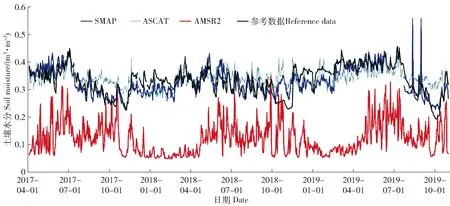
图3 SMAP、ASCAT、AMSR2和参考数据逐日时间序列Fig.3 Day-by-day time series of SMAP,ASCAT,AMSR2 and reference data

表2 湘江流域SMAP、ASCAT、AMSR2在流域尺度的评估指标值Tab.2 Evaluation indices of SMAP,ASCAT and AMSR2 in the Xiang River basin at watershed scale
整体而言,SMAP和ASCAT在流域尺度和格点尺度精度均较高,且各有优势。SMAP和参考数据集的相关性最高,但在格点尺度上存在小部分区域偏差较大的情况,且存在个别离群值。ASCAT与参考数据集的偏差较小,但与参考数据集的相关性相较于SMAP而言较低。AMSR2在湘江流域上无法捕捉到土壤水分的变化特征,对土壤水分严重低估,且监测深度略小于其他3个产品。因此,笔者选择监测深度均为0~5 cm的SMAP和ASCAT进行数据融合。
3.2 数据融合验证
在每个格点上,将基于EnKF融合后的数据集与CLSMDAS参考数据集土壤水分进行比较,得到各个评估指标在研究区域的空间分布图(图2)。在格点尺度上,融合后的数据集的精度整体较高。融合后数据在湘江流域75%格点上的R值均>0.5,整体相关性较高。BIAS在中部高程较小区域对土壤水分存在高估,而在高程较大的区域则存在低估。但融合后的数据整体偏差较小,79%格点的BIAS值处于-10%~10%。且RMSE值在几乎所有格点上都<0.08 m3/m3,ubRMSE值在所有格点上均<0.2 m3/m3。
融合数据的精度相比于原遥感产品也有明显的提升。SMAP数据集的R值、RMSE值、ubRMSE值表现都较好,只有BIAS值时空分布差异性较大,尤其是在流域东北部呈现出较大的高估。通过数据融合,遥感土壤水分的BIAS值相比于原SMAP数据在66%的格点上减小20%以上;与ASCAT相比,融合后精度的提升更加明显:RMSE值、ubRMSE值在约95%格点上均得到降低,而所有格点上的R值都有不同程度的提升。以上结果表明数据融合可以提高遥感土壤水分数据的精度。
在流域尺度上,计算基于EnKF数据融合得到的土壤水分数据在流域上的平均值,并将其时间序列与CLSMDAS参考数据集比较(图4)。可见,融合数据总体上呈现出与参考数据集较为一致时间变化特征。对比原SMAP和ASCAT的评估指标值可知,融合得到的数据除在R值上与SMAP基本相同外,其余3个值的表现都优于原先精度较高的SMAP(表3)。与SMAP相比,BIAS值减少50%,RMSE值减少3%,ubRMSE减少3%。相较于ASCAT,R值提高56%,BIAS值减少65%,RMSE值减少27%,ubRMSE值减少26%。因此,融合数据精度改善效果显著,准确性得到极大提升。同时,原ASCAT数据集在2017年7月份至12月份存在较大的偏差,但融合数据在该时段的偏差较小。原SMAP数据存在个别远高于参考数据的离群值,融合后的数据虽仍存在个别离群值,但其偏差有一定程度上的减小。

图4 SMAP、ASCAT、参考数据和融合数据逐日时间序列图Fig.4 Day-by-day time series of SMAP,ASCAT,reference data and fused data

表3 SMAP、ASCAT及融合后数据集的评估指标值Tab.3 Evaluation indices of SMAP,ASCAT and fused datasets
4 讨论
3种遥感土壤水分产品的表现与多种因素有关,包括反演算法和地理条件等。AMSR2的精度较差可能是由于JAXA反演算法未充分考虑温度的影响[31]。建立查找表时,该算法将温度固定为20 ℃,而JAXA算法中使用的PI和ISW指标无法消除温度的影响[31-32]。此外,他们的表现可能与地形存在一定的联系。SMAP高估流域中部地势较低的区域的土壤水分,低估流域南部地势较高的区域的土壤水分(图1)。另外2种产品在地势较高的流域边缘地区也表现出相对较差的性能。这表明遥感土壤水分产品的准确性可能受到地形的影响,具有较高海拔的山地地形可能会导致遥感技术在获取土壤水分值时的误差,这一发现在之前的一些研究中也被证实了[22,33]。
本研究中的数据融合结果较为令人满意的性能,但其表现与数据的选择和算法的不确定性密切相关,仍存在一些改进的空间。首先遥感数据本身的精度在很大程度上影响融合数据的精度,未来可选取更多其他的遥感数据集以进一步探究不同遥感产品在数据融合中的表现。而融合过程中,对于数据精度的评估是数据融合的关键步骤。本研究中仅考虑数据在整个时间序列上的误差和不确定性,在之后的研究中,将考虑每个时刻或更短时序的不确定性的估计方法,从而差异化地估计每个格点数据的精度,以期进一步改善数据融合的精度。另外,一些其他的融合方法在土壤湿度数据融合中的应用及其与EnKF算法间的比较也值得讨论,比如贝叶斯模型平均方法和神经网络方法。
5 结论
SMAP与参考数据集相关性最高,RMSE值和ubRMSE值较低,而BIAS值虽在部分格点呈现明显的高估,但在流域尺度上表现良好。ASCAT与参考数据的相关性略次于SMAP,但在流域尺度和格点尺度上的偏差均很小。而AMSR2在4种评估指标上表现均较差,不能很好捕捉到土壤水分数据的变化。
基于EnKF得到的融合数据在格点尺度和流域尺度上的精度均较高,且相较于原数据评估指标均得到显著改善。在格点尺度上,相较于SMAP,融合数据的BIAS值在42%格点上都得到改善。相较于ASCAT,融合数据的RMSE值和ubRMSE值在80%格点上得到减小,而R值则在90%格点上得到提升。在流域尺度上,相比于SMAP,融合数据的BIAS值减少50%,RMSE值减少3%,ubRMSE值减少3%。而相比于ASCAT,融合产品的R值提高56%,BIAS值降低65%,RMSE值降低27%,ubRMSE值降低26%。此外,融合数据对原遥感数据SMAP存在的个别离群值有一定程度的修正。总体而言,该融合数据表现出了较高的精度,证明利用EnKF算法融合已有的遥感土壤水分产品可得到更高精度的融合土壤水分数据。本研究为土壤水分数据监测提供一定的数据基础,对湘江地区减灾防旱工作具有重要意义。