帧转移型面阵CCD相机拖尾评价标准和校正方法
2022-05-07李扬骆冬根孙亮李双姚萍萍向光峰方璐璐洪津
李扬,骆冬根,孙亮,李双,姚萍萍,向光峰,方璐璐,3,洪津
(1 中国科学院合肥物质科学研究院 安徽光学精密机械研究所,合肥 230031)
(2 中国科学技术大学,合肥 230026)
(3 安徽大学,合肥 230601)
0 引言
具有高灵敏度、高分辨率、宽光谱响应的帧转移型面阵CCD 是星载偏振相机[1]的主要图像传感器,帧转移型面阵CCD 因其固有结构特性产生的图像模糊现象被称为拖尾[2],拖尾会降低星载偏振相机的成像质量和光谱测量精度[3],进而影响遥感图像产品参数反演的准确性[4]。
国内外学者对配备帧转移型面阵CCD 的相机提出了一系列的拖尾校正模型。英国国王学院物理系的POWELL K 对帧转移型面阵CCD 三种工作模式下的拖尾进行分析,分别给出了不同工作模式下基于矩阵法的拖尾校正模型[2],后续研究人员在其研究基础上进行了许多算法改进并针对特定仪器发展新的拖尾校正方法。如德国慕尼黑大学的TABEL S 和STECHELE W 等根据CCD 的不同工作模式推出拖尾校正的并行计算算法,其并行迭代变体应用在天文观测中[5];同年,他们又研制出基于FPGA 的在线拖尾校正系统,实现了每秒400 幅具有百万像素的帧校正[6];国内西北工业大学的孙瑾秋采用截尾均值滤波技术和差分运算对天文观测相机拍摄图像中的拖尾进行估算和校正[7];姚睿利用小波变换对星空背景图像的高频和低频分量分别进行拖尾校正[8]。研究人员通过优化图像处理算法来校正拖尾,在天文观测领域实现了快速、高效和高质量的拖尾校正效果,但是这些算法并不适用于星载相机对地拍摄地物复杂图像时的拖尾校正。中科院安徽光机所研制的大气痕量气体差分吸收光谱仪利用帧转移型面阵CCD 在标准工作模式下矩阵法的校正公式进行拖尾校正[9],但矩阵法的拖尾校正模型不能应用于目标变化的场景,且要求图像不存在饱和像元[10]。随着图像传感器制备技术的提高和工艺的完善,厂商生产帧转移型面阵CCD 时在像元面预置若干暗行,人们可以通过扣除暗行来校正拖尾,这种方法被称为暗行法,韩国延世大学的HAN Y S 利用滤波处理后的暗行数据进行图像拖尾校正[11];中科院上海技物所的张腾飞论证了暗行与其他像元行之间存在线性相关性,以此进行拖尾校正并恢复饱和像元的真实信号[12];德国Max Planck 研究所的IGLESIAS F A 和印度天体物理研究所的NAGARAJU K 等在连续帧曝光的拖尾模型中加入目标光强周期变化的特征,推出了相应的拖尾表达式和噪声特性,在目标发生周期性变化的场景中取得好的校正效果[13]。暗行法不受像元方阵的限制,被广泛应用于星载偏振相机的拖尾校正。随着卫星遥感应用技术的发展,星载偏振相机分辨率和测量精度不断提高,对拖尾校正精度也有了更高的要求。因此,研究适合于星载偏振相机的高精度拖尾检测和校正方法具有重要的科学意义和工程价值。
本文根据帧转移型面阵CCD 的工作机制,分析了拖尾的产生原理,结合多角度偏振成像仪(Directional Polarization Camera,DPC)的成像和拖尾特点[14],发现暗行法校正拖尾时因局部扩散效应[15]等因素导致暗行漏光,从而使拖尾校正不准确。根据拖尾特征构建了DPC 拍摄积分球的拖尾仿真模型,利用仿真模型中拖尾区域的灰度标准差和平均梯度与积分球光斑灰度值的对应关系,建立了表征拖尾的评价标准,利用拖尾的灰度标准差百分比和平均梯度百分比量化拖尾程度,通过DPC 拍摄积分球的实验验证该评价标准的有效性。最后利用评价标准提出了基于暗行法的校正拖尾寻优算法,通过该算法得到校正DPC 各通道图像的拖尾所需的最优暗行数量,解决因暗行误差使拖尾校正不准确的问题。
1 拖尾的产生原理和校正方法
1.1 拖尾的产生原理
帧转移型面阵CCD 的测量信号通过电荷转移而读出,电荷在像元之间的转移不是瞬时完成的,在未安装机械或电子快门时,电荷转移过程中曝光仍在继续,将产生的额外光电荷附加到成像产生的光电荷中,表现为沿帧转移方向的一条横跨图像的拖尾条纹。DPC 是用于获取全球气溶胶和云性质参数的星载偏振相机,配备了帧转移型面阵CCD 作为图像传感器,图1(a)为DPC 拍摄积分球的原始图像,可以看到从图像顶部沿帧转移方向到底部的拖尾条纹,图1(b)为虚线处拖尾像元灰度值。
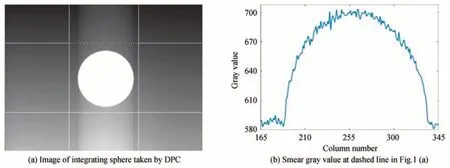
图1 DPC 拍摄图像中的拖尾Fig.1 The smear in the image taken by DPC
帧转移型面阵CCD 主要由成像区、存储区和输出寄存器三部分组成,假设帧转移型面阵CCD 感光区像元数量为512×512,其完整成像过程包括:
1)感光区电荷清除。电荷清除过程可看作是空电荷包不断从CCD 阵列顶部(ROW1)向底部(ROW512)移动。电荷包在像元之间的转移不是瞬时的,在没有机械或电子快门时,成像区始终处于光照状态,各像元在电荷包转移过程中持续产生新的光电荷,该过程如图2(a)所示。图中实线实心五角星为目标在成像区的投影位置,虚线空心五角星为电荷包“路过”投影位置时产生的额外光电荷。刷帧结束时,这些光电荷表现为从目标投影位置到CCD 底部的拖尾,如图2(b)所示。

图2 电荷清除过程示意图Fig.2 The diagram of charge removal
假设电荷包在相邻像元之间的转移时间为t,对于第n列像元,电荷清除过程中产生的光电荷可用矩阵表示为

式中,为第m行的电荷量,Ym为第m行像元在单位时间内产生的光电荷。
2)曝光成像。曝光时间内CCD 成像区所有像元将接收到的光子转变成光电荷,以电荷信号的形式记录一帧图像。曝光结束时,对于第n列像元,在曝光时间内累积的光电荷可用矩阵表示为

式中,为第m行的光电荷,T为曝光时间。
3)帧转移。成像结束后,图像以电荷信号的形式从成像区转移到存储区等待读出。帧转移与电荷清除类似,如图3(a)所示。图中虚线实心五角星为曝光时间内产生的光电荷,目标投影位置上方的电荷包“路过”投影位置时也会产生额外的光电荷。帧转移结束时,这些光电荷表现为从目标物投影位置到CCD 顶部的拖尾,如图3(b)存储区虚线框内所示。

图3 帧转移过程示意图Fig.3 Frame transfer diagram
对于第n列像元,成像区向存储区转移过程中产生的光电荷可用矩阵表示为

式中,为第m行的光电荷。
4)像元电荷的读出。帧转移结束后,存储区的电荷通过读出寄存器按行依次读出,将每个像元的电荷量转化成电压信号。存储区被遮光材料覆盖,因此在读出过程中不受光照影响。读出的光电荷包含了刷帧、曝光和帧转移三个过程累积的电荷量之和。因此对于第n列的像元,读出的光电荷矩阵表达式为式(1)、(2)和(3)之和,即

式中,Xm为第m行的光电荷。令转移因子δ=t/T,则式(4)可以写成

式中,是曝光时间内第m行累积的光电荷,即目标图像的真实值。
根据式(5)可知像元在成像过程中,收集的光电荷总量为该像元曝光时间内产生的光电荷与同列感光区像元曝光时间内产生的光电荷的δ倍之和,同列感光区像元曝光时间内产生的光电荷的δ倍即为拖尾的电荷量。拖尾是帧转移型面阵CCD 固有结构特性产生的图像模糊现象,当视场内存在高辐亮度目标,或者曝光时间较短时,拖尾更加明显。拖尾会影响相机的成像质量,降低测量精度,需要通过技术手段将其校正。
1.2 暗行法校正拖尾模型
暗行是设在帧转移型面阵CCD 成像区顶部或者底部的若干行被遮挡的像元,在帧转移过程中,暗行的电荷包也会“路过”感光区域附加额外光电荷,光电荷量为同列感光区像元曝光时间内产生的光电荷的δ倍,因此暗行信号的大小能够准确反映拖尾光电荷的大小。将CCD 输出图像的每个像元灰度值减去同列暗行像元的灰度均值,得到图像真实值的方法被称为暗行法。暗行法不受像元矩阵的限制,适用范围广,其校正公式为

根据式(6)可知,暗行数量越多,同列暗行像元的均值就越能准确反映该列像元的拖尾信号值,但是帧转移型面阵CCD 的结构限制了暗行的数量上限,过多的暗行会减少可用像元的比例,增加系统冗余,且暗行数量达到一定程度时,对校正效果的提升非常有限。另外,与感光区相邻的部分暗行像元因局部扩散效应而发生漏光现象,暗行在曝光期间产生光电荷,漏光的暗行像元是拖尾校正效果的影响因素之一。图4 是积分球成像在DPC 视场边缘的图像,图4(b)、图4(a)中的虚线框区域,第15 行像元有明显的漏光现象。
图5 展示了图4(a)中第13、14 和15 行像元的灰度值,这些像元受局部扩散效应等因素的影响而有着更高的灰度值,其中直接与感光区相邻的第15 行暗行所受影响最大。暗行的偏差在式(6)中表现为Xi的变化,进而影响校正后的图像。为避免暗行漏光导致拖尾校正不准确,需通过对不同数量暗行校正后图像的拖尾进行评价,找到最合适的暗行数量。
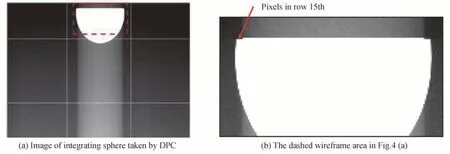
图4 积分球成像在DPC 视场边缘示意图Fig.4 Integrating sphere imaging at the edge of the DPC field of view

图5 靠近视场边缘的暗行像元灰度值Fig.5 Gray value of dark line pixels at the edge of the field of view
2 拖尾程度的评价方法和实验验证
2.1 拖尾仿真模型
假设积分球出射窗口的辐亮度是均匀的且正对DPC 视场中心,则积分球在帧转移型面阵CCD 像元面中心成像为圆形光斑,光斑内像元的灰度值都相等。用MATLAB 构建一个380 行512 列的矩阵,矩阵中元素对应CCD 的像元,元素的值即为像元灰度值。以矩阵中心(190,256)为圆心,作半径为R的圆,如图6 所示,该矩阵可表示理想状态下积分球在DPC 上成像的无拖尾仿真模型。圆形光斑所在坐标为积分球在像元面的投影位置,元素数值对应为积分球在CCD 像元上的响应灰度值。

图6 积分球在帧转移型面阵CCD 上成像的仿真模型Fig.6 The simulation model of integrating sphere imaging on frame transfer CCD
根据式(5)为积分球在DPC 成像的仿真模型添加拖尾,并用灰度图的形式显示,如图7 所示。图7(a)展示了光斑区域的像元灰度值为1 440 时的拖尾仿真图像,图7(b)是图像第100 行、第165~346 列像元的灰度值,对应图7(a)中的虚线位置,包含了拖尾处像元的响应灰度值在行方向上的变化,拖尾像元的最大灰度值为55。

图7 积分球在DPC 成像的拖尾仿真模型Fig.7 Smear simulation model of integrating sphere in DPC imaging
根据1.1 节的分析已知拖尾与目标辐亮度或转移因子有关,可通过设置仿真模型中CCD 光斑区域的像元灰度值调整拖尾的大小,如表1 所示,CCD 像元面的辐照度越大,拖尾的像元灰度值越大。

表1 积分球拖尾仿真图像中不同区域的灰度值Table 1 The gray value of different regions in integrating sphere smear simulation image
2.2 拖尾程度的评价标准
帧转移型面阵CCD 由许多像元组成,其成像可看成像元灰度值的二维数据集,灰度值大小和分布是图像的具体内容,展现了图像的亮度和色度信息、图像局部对比效果、图像清晰度以及图像的画面信息[16]。其中,图像的亮度和色度可用像元灰度值大小来表示,图像清晰度和局部对比效果可用图像的纹理,即像元之间的变化趋势来表征。拖尾是图像内容的一部分,可以利用图像拖尾区域的像元灰度值表征拖尾。定义拖尾区域为在CCD 感光区中与成像目标同列,不包括成像目标的像元。以2.1 节的积分球拖尾仿真图像为例,积分球的成像光斑占据像元区域第122~258 行、第188~324 列,则拖尾区域为光斑上方的第1~121 行、第188~324 列,和光斑下方的第259~380 行、第188~324 列。取相邻且相同大小的无拖尾背景区域像元作对比,无拖尾背景区域像元为第1~121 行、第325~461 列和第259~380 行、第325~461 列。如图8 所示。
6.加大名优品种技术推广和示范点建设力度,为新品种、新技术的推广打下基础。2018-2020年全省每年引导10家规模养殖场转型发展,为当地养殖户示范渔业供给侧改革基地。每年在每个示范基地举办养殖专题技术培训班2期,培训养殖户100人次以上,全省每年培训养殖户2000人次以上。

图8 积分球拖尾仿真图像的光斑区域、拖尾区域和相邻无拖尾区域示意图Fig.8 Schematic diagram of spot area,smear area and adjacent no smear area in integrating sphere smear simulation image
为了对拖尾程度进行评价,引入灰度标准差和平均梯度作为评价标准,灰度标准差用于表征像元灰度值的大小分布,平均梯度用于表征像元灰度值之间的变化趋势,两者分别从图像信息的离散度和纹理变化对拖尾进行描述。
2.2.1 灰度标准差
标准差能够反映数据集的离散程度,用σ来表示,计算公式为


式中,σsmear为拖尾区域灰度标准差,σnosmear为相邻且相同像元数量的无拖尾区域灰度标准差。
在仿真模型中只有积分球一个目标,其背景是无光照且均匀的,根据式(7)可得无拖尾背景区域的像元灰度标准差等于0,拖尾区域的像元在帧转移后增加了额外的光电荷量,其灰度标准差不为0,因此可以利用拖尾区域的灰度标准差来评价拖尾程度。根据2.1 节分析可知拖尾灰度值大小与目标辐亮度有关,目标辐亮度越大,其在CCD 上所成像的灰度值越高,拖尾也越明显,可通过设置仿真模型中积分球在CCD 投影区域的光斑辐照度来实现不同灰度值的拖尾。计算拖尾区域的灰度标准差,结果如图9 所示,拖尾区域像元的灰度标准差和光斑区域像元灰度值符合线性递增关系,即拖尾程度越高,拖尾区域像元的灰度标准差越大。仿真模型中,拖尾的灰度标准差百分比为100%。
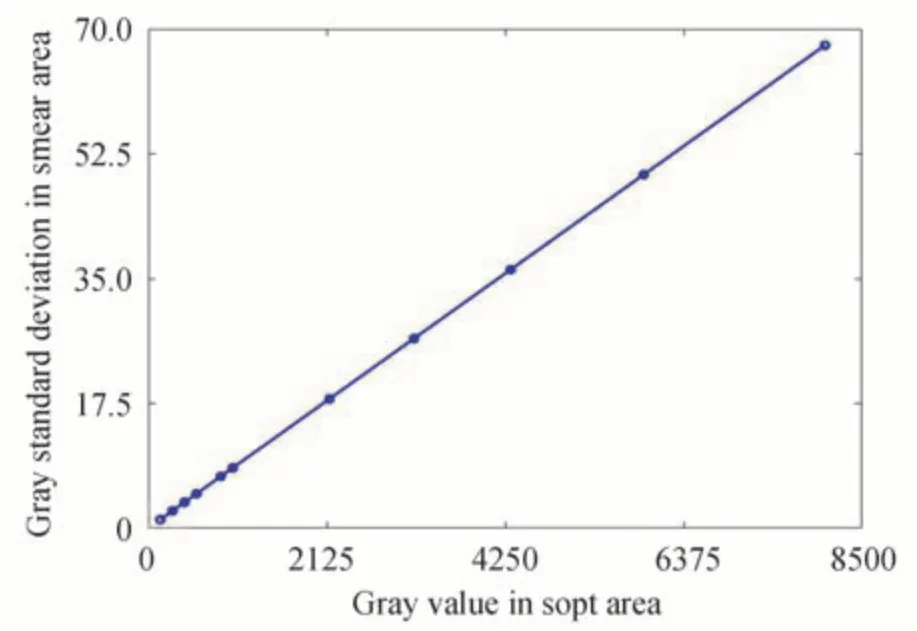
图9 积分球拖尾仿真图像中光斑区域像元灰度值与σsmear 的关系Fig.9 The relationship between the gray value of the spot area pixel and the σsmear in integrating sphere smear simulation image
图像梯度是对二维离散函数的求导,可以灵敏反映二维数据集的变化特征。定义平均梯度G为所选区域像元灰度值的图像梯度均值,计算公式为

式中,m和n是所选区域像元的行列数,Gx(x,y)和Gy(x,y)分别是像元在水平方向和垂直方向的梯度,平均梯度反映了选定区域的纹理情况。定义ηG为拖尾的平均梯度百分比,用于表示平均梯度计算得到拖尾的百分比,即

式中,Gsmear为拖尾区域灰度标准差,Gnosmear为相邻且相同像元数量的无拖尾区域平均梯度。
根据式(9)可得无拖尾背景区域的像元平均梯度等于0,拖尾区域的像元在帧转移后增加了额外的光电荷量,其平均梯度不为0,因此可以利用拖尾区域的平均梯度来评价拖尾程度。设置仿真模型中积分球在CCD 投影区域的光斑辐照度来实现不同灰度值的拖尾,计算拖尾区域的平均梯度,取光斑区域上下两部分拖尾区域平均梯度的均值,结果如图10 所示,拖尾区域像元的平均梯度和光斑区域像元灰度值符合线性递增关系,即拖尾程度越高,拖尾区域像元的平均梯度越大。仿真模型中,拖尾的平均梯度百分比为100%。

图10 仿真模型中光斑区域像元灰度值与Gsmear 的关系Fig.10 The relationship between the gray value of the spot area pixel and the Gsmear in integrating sphere smear simulation image
2.3 评价标准的实验验证
DPC 装配了帧转移型面阵CCD 探测器,成像区设有380×512 个像元,在成像区顶部有15 行暗行像元。DPC 的成像系统结构示意图如图11(a)所示,转轮上装有15 个滤光片,对应不同光谱通道,分别为443 nm,490 nm,565 nm,670 nm,763 nm,765 nm,865 nm,910 nm 和不透光的本底通道,其中490 nm,670 nm 和865 nm各包含P1、P2 和P3 三个偏振通道。
为实验验证灰度标准差和平均梯度两种评价方法的有效性,以大口径积分球作为DPC 的拍摄目标,采集积分球图像。实验中可调节积分球内部开启灯数来获取不同辐亮度的目标图像,并对图像拖尾区域的灰度标准差和平均梯度进行计算。DPC 拍摄积分球实验平台如图11(b)所示,包括DPC、积分球辐射源、硅陷阱探测器和相关机械平台,其中硅陷阱探测器用于监测积分球辐亮度变化情况。
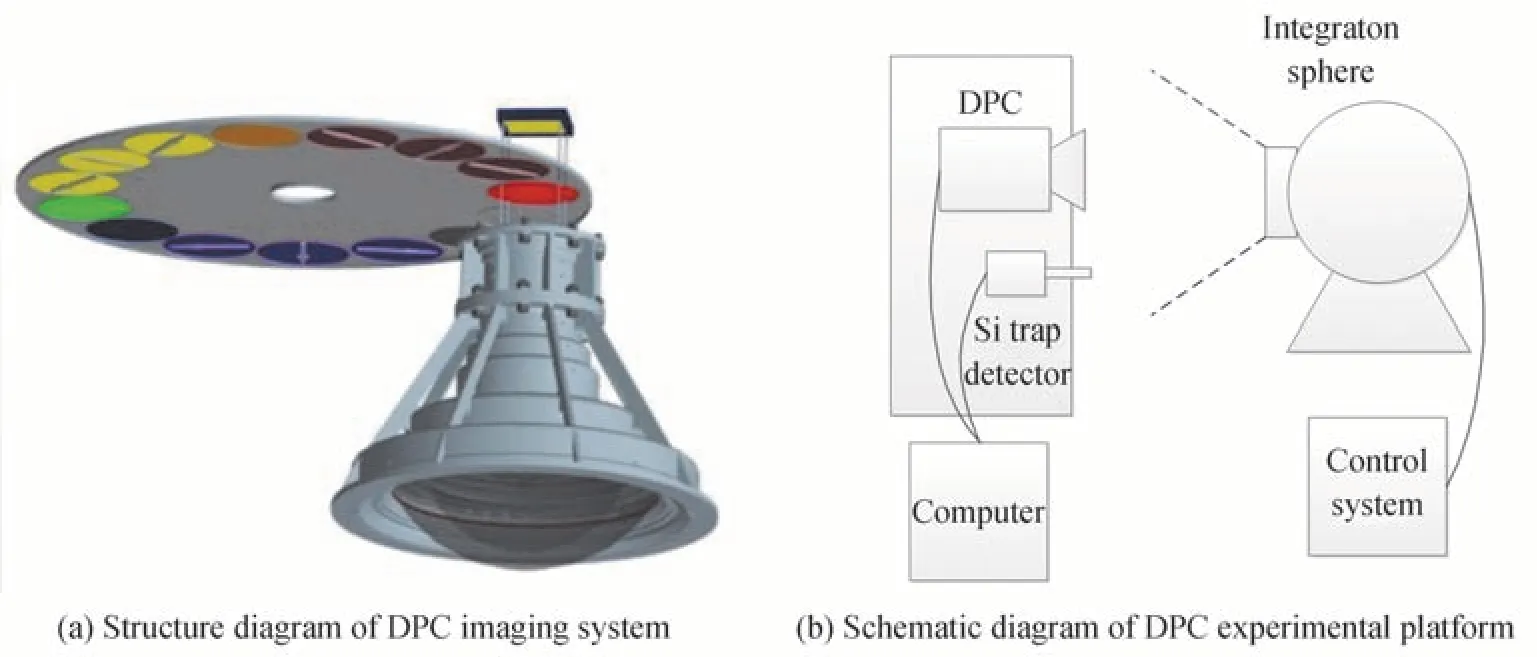
图11 DPC 成像系统结构和实验平台示意图Fig.11 The diagram of DPC imaging system and experimental platform
对实验获取的原始数据进行预处理,每幅图像扣除相应的本底,以降低暗电流和电路噪声的影响。表2是DPC 在565 nm 波段拍摄的数据,第2 行是光斑区域在扣除本底后的灰度均值,显示了积分球点亮灯数与积分球在DPC 成像的灰度均值之间的对应关系,第3 行是图像的第100 行、第164~346 列像元的最大灰度值,这行像元包含了拖尾区域的像元,可比较不同积分球灯数下拖尾的灰度值。从表2 可知积分球点亮的灯数越多,拖尾区域像元的最大灰度值越高。图12 展示了不同灯数的积分球在DPC 上的成像,图像拖尾的明显程度与积分球点亮的灯数相关。

图12 积分球点亮不同灯数时DPC 拍摄的图像Fig.12 The DPC imaging with different number of integrating sphere lights

表2 积分球点亮灯数和光斑区域的灰度值Table 2 The number of lights on the integrating sphere and the gray value of the spot area
积分球在CCD 成像光斑区域第120~264 行、189~333 列,选择第16~119 行、第189~333 列和第265~380 行、189~333 列像元作为拖尾区域,选择第16~119 行、第334~478 列和第265~380 行、第334~478 列像元作为对比的无拖尾背景区域。计算不同灯数下图像拖尾区域的灰度标准差和平均梯度,其中平均梯度取光斑区域上下两部分拖尾区域平均梯度的均值。将实验数据与仿真数据的灰度标准差和平均梯度做比较,如图13 所示。实验数据的拖尾区域灰度标准差和平均梯度与光斑区域像元灰度值呈线性关系,即目标辐亮度越大,拖尾程度越高,拖尾区域的灰度标准差和平均梯度也越大,积分球的散射光使实验数据的无拖尾背景区域像元灰度值不为0,其灰度标准差和平均梯度随积分球点亮灯数的增加有一定变化,图13 表明实验数据与仿真数据的评价结果相一致。其中实验数据评价曲线的斜率和截距不同于仿真数据是帧转移面阵CCD 的非均匀性和低光照时的非线性所导致。图14 是拖尾的灰度标准差百分比和平均梯度百分比,随着目标辐亮度增大,两个评价标准的拖尾百分比都是上升的。实验结果证明,拖尾区域的灰度标准差和平均梯度可以较好地反映图像的拖尾程度。

图13 实验数据与仿真数据的评价结果对比Fig.13 Comparison of evaluation results between experiment and simulation

图14 不同目标辐亮度下拖尾的灰度标准差和平均梯度百分比Fig.14 The smear percentage of gray standard deviation and average gradient with different target radiance
2.4 校正拖尾寻优算法
暗行法校正拖尾的效果与暗行的数量关系密切,理论上暗行数量越多,校正效果越好,但是暗行误差将影响校正效果。为了提高校正的精度,可以通过评价不同数量的暗行校正图像拖尾的效果,来确定合适的暗行数量。
基于暗行法校正模型和拖尾程度的评价方法,提出了一种校正拖尾寻优算法,对不同数量暗行校正后的图像进行拖尾程度评价,得到最优校正效果,算法流程如图15 所示。先对DPC 采集的原始图像数据扣除本底,再根据暗行法校正模型用不同数量的暗行(N=1,2,…,15)进行拖尾校正,得到15 幅校正后的图像,计算校正后图像拖尾区域的灰度标准差和平均梯度,根据灰度标准差和平均梯度两个评价标准找出拖尾程度最低的图像。
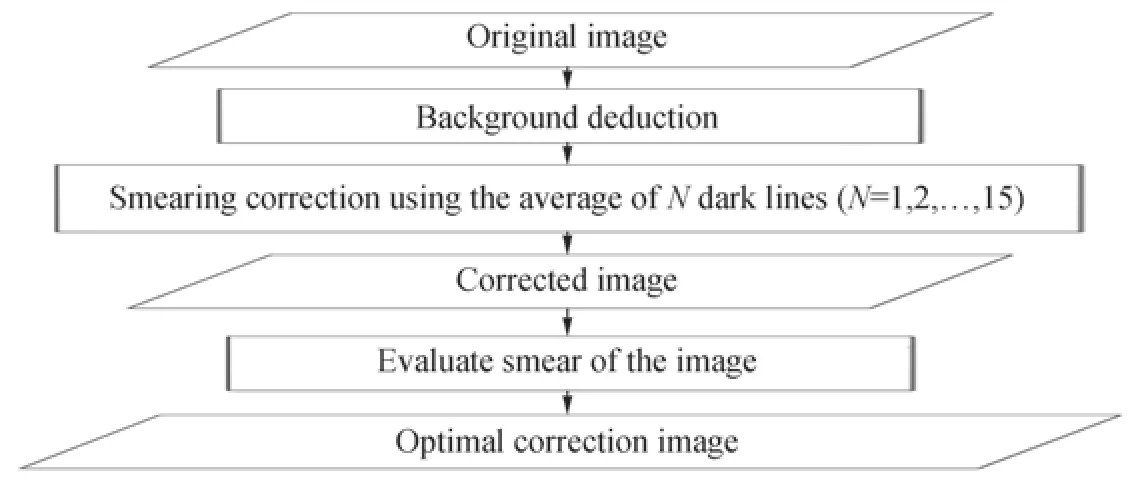
图15 基于暗行法的校正拖尾寻优算法流程Fig.15 Optimizing algorithm for correcting smear based on the dark lines method
3 实验结果与分析
用校正拖尾寻优算法对DPC 拍摄积分球实验获得的图像进行处理,实验平台如图11(b)所示。调整DPC 所在机械平台的位置,使积分球光斑成像在靠近CCD 暗行的边缘视场,待积分球预热结束,进入稳定工作状态后,采集DPC 各通道的图像。图16 展示了积分球在DPC 的565 nm 波段上所成的像,其中光斑区域为第16~112 行、第196~326 列,选择拖尾区域为第113~380 行、第196~326 列,无拖尾背景区域为第113~380 行、第327~457 列。计算出校正前图像拖尾区域的灰度标准差σsmear为15.731 7,平均梯度Gsmear为1.631 1,无拖尾背景区域的灰度标准差σnosmear为10.604 9,平均梯度Gnosmear为1.281 9,图像拖尾的灰度标准差ησ为32.59%,平均梯度百分比ηG为21.41%。

图16 积分球在DPC 的565 nm 波段上所成的像以及拖尾Fig.16 The image and smear formed by the integrating sphere on the 565 nm band of DPC
用校正拖尾寻优算法对DPC 拍摄的原始图像进行处理,过程如下:对原始图像扣除本底后,分别用不同数量暗行进行拖尾校正,得到15 幅校正后的图像,对这些图像的拖尾区域进行评价,拖尾区域的灰度标准差或平均梯度最小的图像即为最优校正图像,当最小灰度标准差和最小平均梯度不是相同数量暗行的校正结果时,选择更少数量的暗行进行校正。
图17 为校正所用暗行数量与校正后拖尾区域灰度标准差和平均梯度的关系曲线,随着暗行数量的增加,拖尾校正得越完全,拖尾区域的灰度标准差和平均梯度呈下降趋势。当邻近感光区域的暗行加入校正后,拖尾区域的灰度标准差和平均梯度增加,校正效果变差。图17(a)显示了拖尾区域的灰度标准差在用12行暗行进行校正时取得最小值,图17(b)显示了拖尾区域的平均梯度在用13 行暗行进行校正时取得最小值。综上,为得到最优的拖尾校正效果,应使用12 行暗行进行校正,图18 为校正后的图像。计算出校正后图像拖尾区域的灰度标准差σsmear为10.912 9,平均梯度Gsmear为1.366 5,无拖尾背景区域的灰度标准差σnosmear为10.551 9,平均梯度Gnosmear为1.290 6,图像拖尾的灰度标准差百分比ησ为3.31%,平均梯度百分比ηG为5.55%。与校正前相比,ησ和ηG的降幅分别为89.9%和74.0%。

图17 暗行数量与校正后图像拖尾程度的关系Fig.17 The relationship between the number of dark lines and the degree of image smear after correction

图18 校正后的图像Fig.18 The image after correction
同样地,用校正拖尾寻优算法对DPC 的443 nm、490 nm P2、670 nm P2、763 nm、765 nm、865 nm P2 和910 nm 通道采集的原始图像进行处理,得到各通道的15 幅校正后的图像和相对应的评价曲线。图19~20分别是各通道在不同数量的暗行校正后拖尾区域的灰度标准差σsmear和平均梯度Gsmear,横坐标为校正拖尾所用的暗行数量N。

图19 各通道在不同数量的暗行校正后的σsmearFig.19 The σsmear of each channel after different number of dark lines correction
从图19~20 可知,暗行法校正后图像拖尾区域的灰度标准差和平均梯度都小于原始图像,即校正后图像的拖尾程度更低。用更多数量的暗行进行校正能够进一步降低图像拖尾区域的灰度标准差和平均梯度,得到更好的校正效果。视场边缘存在的漏光暗行加入校正算法会使拖尾区域的灰度标准差和平均梯度增大,校正效果变差。
根据评价结果,各通道达到最优校正效果所需的暗行数量N以及拖尾的灰度标准差和平均梯度百分比如表3 所示。实验结果表明,利用校正拖尾寻优算法对图像拖尾进行处理,校正后各通道图像拖尾的灰度标准差百分比ησ的最大降幅为50.3%~89.9%,拖尾的平均梯度百分比ηG的最大降幅为65.2%~74.0%。

表3 最优暗行数量以及校正前后ησ 和ηGTable 3 The smear of ησ and ηG before and after correction with optimal dark lines

图20 各通道在不同数量的暗行校正后的GsmearFig.20 The Gsmear of each channel after different number of dark lines correction
4 结论
本文对DPC 成像原理和拖尾的校正方法进行研究,构建了DPC 拍摄积分球的拖尾仿真模型,建立用拖尾区域的灰度标准差和平均梯度来表征图像拖尾程度的评价标准。基于拖尾程度的评价标准,提出了校正拖尾寻优算法,通过评价不同暗行数量校正后图像的拖尾程度,找到最优校正效果的图像。实验结果表明,拖尾区域的灰度标准差和平均梯度能有效地表征图像的拖尾程度,校正拖尾寻优算法能够自适应找出当前实验环境下DPC 所有通道校正拖尾所需的最合适暗行数量,校正后各通道图像拖尾的灰度标准差百分比最大降幅为50.3%~89.9%,拖尾的平均梯度百分比最大降幅为65.2%~74.0%,排除局部扩散效应影响的同时实现该通道最优拖尾校正效果。该方法为有效检测和校正DPC 的图像拖尾提供了技术手段,可为类似的采用帧转移型面阵CCD 设备的拖尾校正提供参考依据。
