新型废旧汽车流水式拆解生产线设计
2022-05-06洪强杭卫星郑焱
洪强,杭卫星,郑焱
(江苏理工学院,江苏常州 213001)
随着中国经济的快速发展, 截至2021年底, 全国机动车保有量达3.95 亿辆,根据我国《机动车强制报废标准规定》各类汽车8~12年使用寿命来计算,预计2026年中国机动车报废量将达到2 450 万辆。随着报废汽车数量的急剧攀升,废旧汽车处理一度成为世界性难题[1]。为了将废旧汽车最大化利用并提高拆解效率,研究人员提出了采用汽车流水式拆解生产线的方式对废旧汽车进行精细化拆解并回收车辆的主要零部件,以提高车辆的剩余价值[2-3]。截至目前,国内针对废旧汽车流水式拆解线的研究仍相对较少[5]。
2019年5月,国务院发布新的《报废机动车回收管理办法》。为了响应国家的新政策,解决和应对废旧汽车快速增长所带来的新问题,本文主要对小型载客废旧汽车的柔性拆解生产线进行了一系列创新性研究,研制开发符合中国国情的自动化废旧汽车拆解生产线和拆解装备,形成了废旧汽车拆解-资源化利用工艺技术,以实现拆解的高效率,废弃资源高值化、高质化利用。
1 拆解线总体结构
如图1所示,新型废旧小型载客汽车流水式拆解线采用的是双轨双线闭环拆解生产线,环形轨道根据企业实际情况成悬空或地面布局,在环形轨道两侧平行的直道中设置两条顺时针循环拆解线且布置多个工位(A 号工位:危险部件与油液预处理;B 号工位:总成拆解;C 号工位:玻璃拆解;D 号工位:内外部件拆解;……,根据车型配置柔性设置更多工位),在程序的控制下,智能夹具夹持废旧小型载客汽车并依托于环形轨道行走在各个拆解工位,且根据工位拆解任务在各个工位完成停留、升降和翻转等与拆解设备匹配的最佳角度与姿态,依次完成多个柔性工位拆解作业,车壳在拆解生产线末端被送至打包粉碎流水线,经压实、粉碎、分选,各种不同的材料都得到分类回收。该模式两条拆解生产线同步进行,具有拆卸效率高、生产批量大、减少工人数量和降低劳动强度等优点。
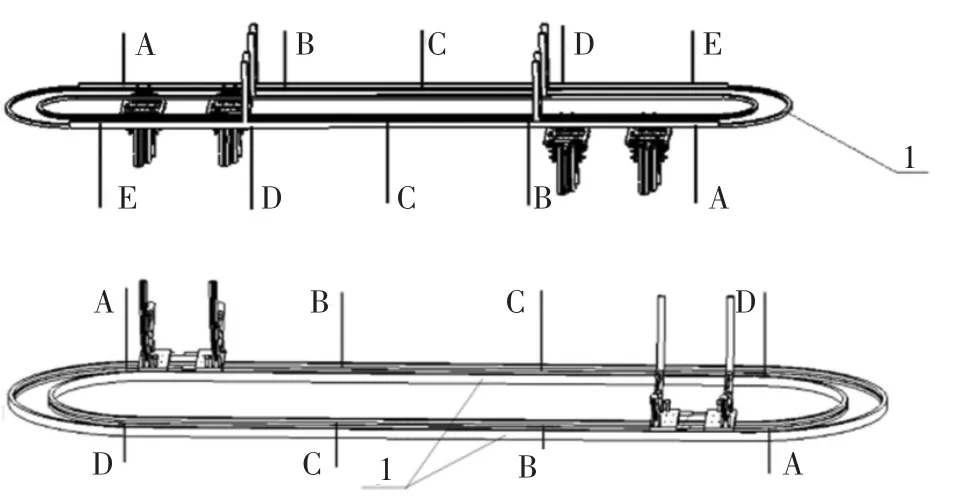
图1 悬空和地面拆解线总体结构
1.1 主要技术参数
1.1.1 基本参数
拆解生产线长度≥80 m
拆解生产线宽度≥40 m
内外轨道间距≥1.3 m
轨道离地高度≥4 m
起重量≤2 t
夹具回转角度≤80°
有效高度≤1 m
电源:三相交流:50 Hz 380 V
1.1.2 液压系统
油泵流量24 L/min
液压系统最大工作压力6 MPa
油箱容积200 L
液压系统最高温度≤80 ℃
1.1.3 控制系统
控制装置遥控器/操作台
通信方式无线/有线
遥控距离≤100 m
2 系统组成
新型废旧小型载客汽车流水式拆解生产线集通信技术、控制技术、传感技术、机电液一体化技术于一体,是控制技术从运动学领域向机械工程动力学领域的发展和跨越,其结构主要由机械系统、液压系统和视觉智能自动控制[4]等几部分组成。为使文章通俗易懂,以悬空式拆解生产线为例进行阐述。
2.1 机械系统
机械系统主要由固定与环形轨道1、驱动与传动机构2、上下升降吊臂机构3 和下垂式智能夹具4 等组成,其结构如图2所示。

图2 机械系统结构图
环形轨道1 设内外轨道,呈椭圆形布置。由支架固定在车间大梁(横梁)上,保证拆解工作的安全和稳定。2 条拆解生产线分别位于环形轨道的不同侧。
驱动与传动机构固定在上平板的顶部,由电机、减速差速机构、半轴和驱动轮等组成,其结构如图3所示。驱动与传动机构与环形轨道形成组合,两驱动轮分别位于内环形轨道和外环形轨道上。电机1 作为动力输出时,通过第一级减速机构2 减速,再通过第二级减速机构3 减速和差速机构4 差速后,带动半轴5 旋转,从而带动驱动轮6 在环形轨道中行驶,带动整个夹具沿轨道行走。
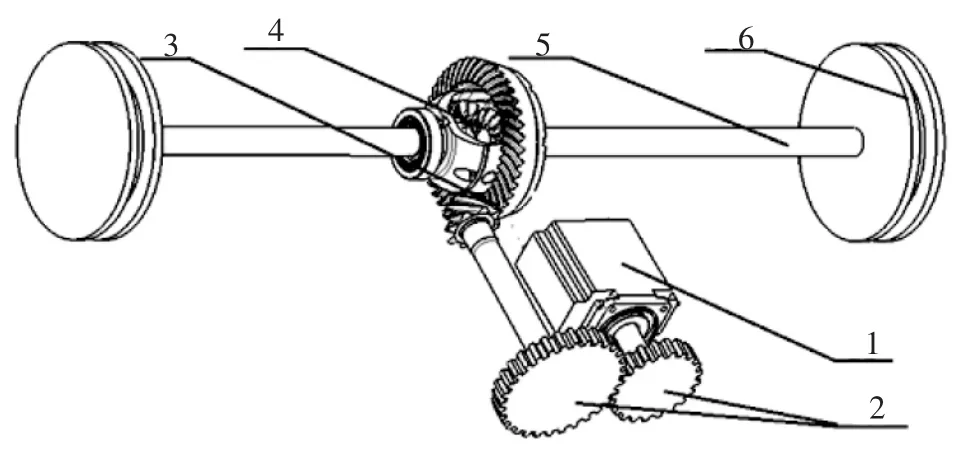
图3 驱动与传动机构结构图
上下升降吊臂机构由固定支架、上平板、升降吊臂和下平板组成,其结构如图4所示。

图4 上下升降吊臂结构图
上平板2 上平面中间位置安装固定驱动与传动机构2,上平面四周与固定支架1 下端制成一体,固定支架1 上端设有滚动轮5,与环形轨道1 形成组合,在固定驱动与传动部分2 的驱动下,整体夹具在轨道中安全运行。
上下升降吊臂4 上端与上平板2 固定,下端与下平板3 固定,液压泵工作,使上下升降吊臂4 上下伸缩,上平板2 固定不动,下平板3 带动夹具做升降运动。
下垂式智能夹具由驱动电机与齿轮、固定支撑、左右回转体与左右Y 型夹具组成,其结构如图5所示。驱动电机2 头部有驱动齿轮1,能驱动左、右回转体8、3 做环形运动。固定支撑的固定支架5 上端安装固定于下平板3,下端安装固定转轴6,转轴中央安装滚动支撑轮7。左、右回转体8、3 结构呈圆环结构,回转体上方制有齿条,与驱动电机驱动齿轮1 啮合,驱动电机1 工作,能使回转体做环形运动;回转体中间部分掏空制成环形凹槽,与滚动支撑轮7 镶配,起支撑作用;左、右回转体8、3 内侧分别制有“”和“”形状的沟槽与实体,成“H”状镶配一起,保证左右回转体运转的过程中不分离,定位可靠。左、右Y 型夹具9、4 分别固定在对应的回转体一侧的底端,Y 型夹具工作时与汽车上部的门框成接触。在左、右回转体环形伸缩运动过程中,左、右Y 型夹具对汽车上部的门框形成夹紧力,保证废旧汽车的可靠固定,与整个夹具成一体在拆解生产线中运动翻转,方便拆解。
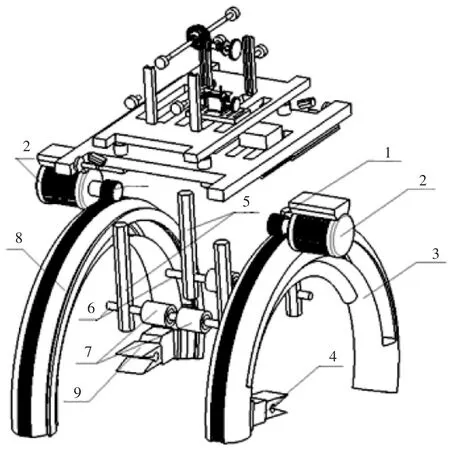
图5 下垂式智能夹具结构图
2.2 液压系统
新型废旧小型载客汽车流水式拆解生产线上下升降吊臂机构如图6所示,4 组液压缸驱动系统共用一套液压泵站,油泵流量为24 L/min,系统最大压力为6 MPa。电动机11 带动液压泵9 从油箱1 吸油,液压泵把电机的机械能转换成液体的压力能。液压工作介质流过管道经调速阀8 和三位四通换向阀4 进入分流集流阀5,通过液压锁6 进入液压缸7 左腔,实现夹具的提升;换向阀换向之后液压介质进入液压缸右腔,实现夹具的下降。分流集流阀通过内部自带的压力与流量敏感部件自动进行调节,当四油缸分别承受不同的负载时,能使油缸运动保持同步。液压锁能把回路锁住,不让回路油液有流动,保证即使外界有一定载荷的情况下仍能保持其位置静止不动。液压泵站温控装置采用外置循环温度固定温控控制方式,实现液压系统油温完全控制在预设值范围之内,避免油液温度过高现象,以保证上下升降吊臂机构能可靠、高效、长期地工作。
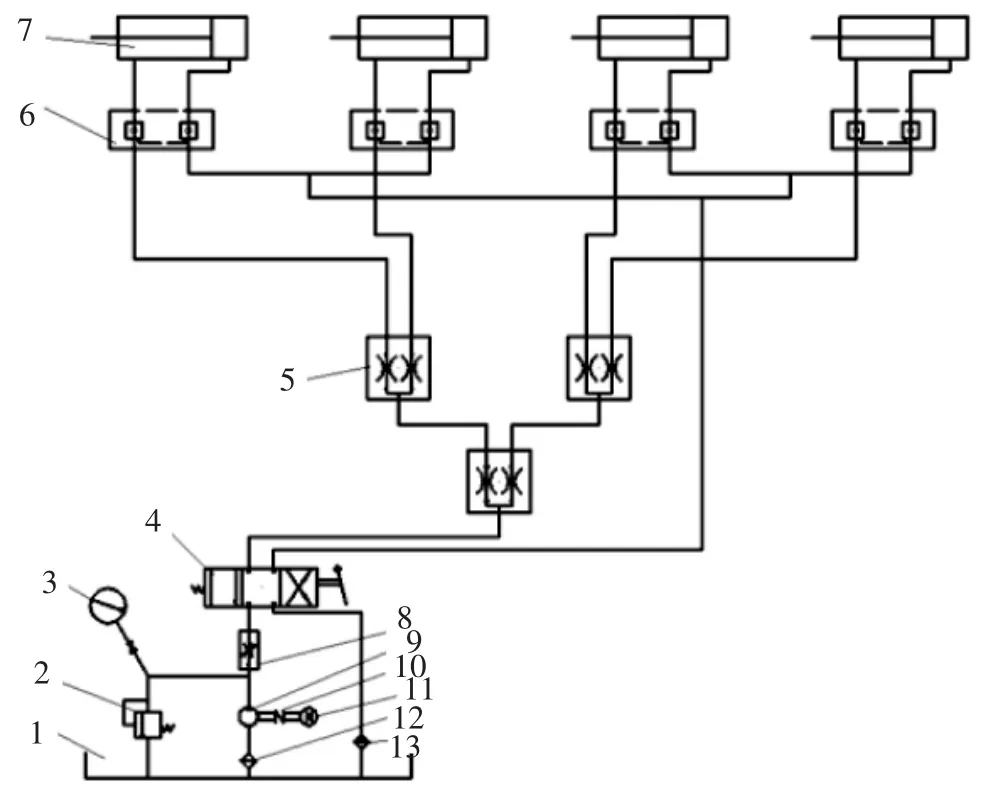
图6 上下升降吊臂机构液压原理图
2.3 智能视觉控制系统
废旧小型载客汽车流水式拆解生产线为与各个工位的拆解设备协调工作,以环形轨道做循环运动为基础,以汽车纵向中心线和工位位置线为定位基准,整个拆解线系统采用智能视觉自动控制,如图7所示,系统组成主要由图像采集部分、图像预处理部分、目标识别与计算等三部分组成。
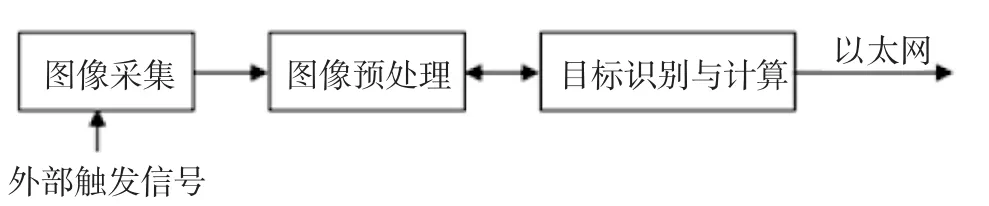
图7 智能视觉控制系统组成原理图
在图像采集部分,FPGA 驱动CMOS 图像传感器,在适当时刻曝光,采集汽车前后保险杠、机盖、车门、车顶等具有特征的外观和处于拆解工位位置图像。图像预处理部分,采集的图像由FPGA 对位置图像进行滤波处理、图像阈值分割,检测被拆解汽车外观边缘,通过轮廓提取和跟踪检测到车辆外轮廓线并存储。目标识别与计算部分由ARM9 主控芯片S3C2440 分析边缘轮廓坐标数据,识别出汽车当前位置和状态,计算汽车质心位置坐标、方向位置标志坐标,并根据相机标定参数进行图像坐标与三维空间坐标变换,最后将计算结果通过局域以太网发送到相应执行器。
拆解生产线工位安装有光电开关,每当光电信号被触发,光电效应使光信号转变为电信号,表明拆解汽车就位,根据传送速度设定适当延时使汽车进入相机视野时恰好进行曝光。以摄像机组图像提供的废旧汽车位置信号,控制系统根据程序控制电机同向旋转,能使两个回转体同时向内外侧做环形运动,实现废旧汽车的翻转与回正;同时也能控制液压泵,通过上下升降吊臂机构实现汽车的上升与下降。
上述智能视觉控制系统具有智能控制定位功能、行走功能、升降功能、收缩功能和翻转功能。
2.3.1 定位功能:在控制装置的存储单元程序中提前录入市面上现有废旧汽车车型外观尺寸信息,废旧汽车到达指定停放位置后,摄像机对整车进行摄像拍照,以地面水平高度为参考,以汽车车标和车尾天线为基准,确定汽车纵向中心线和汽车车身高度,获取汽车的准确位置,为实现后续行走、升降和翻转奠定基础。
2.3.2 行走功能:环形轨道双线拆解生产线中设置五大工位,每个工位根据拆解项目,都设置了规定的时间,控制装置根据内部编制程序,控制驱动电机,让夹具固定废旧汽车整体运行在环形轨道中,在每个工位作适时停留,实现废旧汽车轨道行走。
2.3.3 升降功能:以摄像机图像提供的废旧汽车位置信号,控制装置根据程序控制液压泵,从而控制上下升降吊臂机构工作,能使智能夹具与废旧汽车整体上下运动,实现废旧汽车的上升与下降。
2.3.4 收缩功能:以摄像机图像提供的废旧汽车位置信号,控制装置根据程序控制两驱动电机转向,能使智能夹具两回转体同时扩大张开和同时收缩,实现废旧汽车的夹紧与松开。
2.3.5 翻转功能:以摄像机图像提供的废旧汽车位置信号,控制装置根据程序控制两驱动电机同向旋转,能使智能夹具两回转体同时向同一方向做环形运动,实现废旧汽车的翻转与回正。
3 结论
根据上述方案,制作新型废旧小型载客汽车流水式拆解生产线的样机,为了验证样机的性能指标进行了一系列试验,在生产现场对该设备的定位、升降、翻转,以及抓取车辆的稳定性和可靠性、安全性、电子设备的安全性和可靠性进行了全面测定。结果表明,该拆解生产线各项主要指标均达到了设计要求,改善了劳动环境,减轻了劳动强度,提高了汽车拆解的工作效率,降低了人工成本。
新型废旧小型载客汽车流水式拆解生产线的开发和应用,解决了当下废旧汽车拆解困难和效率低下的作业难题,促进了相关产业联动发展,既达到国家实现节能减排、资源循环利用的目的,又产生了显著的经济效益和社会效益。
