无人遥控测量船远程图传系统研究与应用
2022-05-06马新国黄汉邦胡思航
马新国 黄汉邦 胡思航



摘要:受十年禁漁期及渔民上岸等政策影响,长江岳阳航道测绘中心对无人遥控船测量的需求日益增大,而自主研发的测量船测深仪远程连接系统中连接图像清晰度较差,信号接收延时高易掉线等问题。为满足日常测绘需要,需提高测量效率及测量成果质量,我中心基于新型数据网桥设备作为测深仪图传控制。通过基站模块、船载监控模块实现系统的设计。实验结果表明,基于新型数据网桥设备的无人遥控测量船测深仪远程系统具有连接简单、信号稳定、延迟低等特点,能够满足日常无人船在航道测量中对测深仪监控需求。
关键词:新型数据网桥设备;图传控制;远程系统
中图分类号:TP274 文献标识码:A 文章编号:1006—7973(2022)03-0063-04
1概述
1.1研究背景及研究必要性
长江航道自主研发无人船较早,走在国内前列,但是基础研发能力与专业研发机构有一定差距,作为最早将无人遥控测量船实际应用于实际生产中的单位,岳阳航道测绘中心取得了大量的实践数据。长江岳阳航道测绘中心无人遥控测量船原先采用4G 网络数据传输系统进行实时监控,但在实际测量应用中数据传输系统实时监控并不理想,造成4G 网络经常掉线原因如下:
(1)由于岳阳处辖区地处两省交界,网络信号太差。在测量过程中,测深设备无法实时监控,不能保证测量成果。
(2)无人遥控测量船的远程监控数据功率覆盖低,舱内信号密闭,无法通畅发射和接收信号,在实际测量中很容易超出测量范围,不利于测量安全。
网络掉线引起监控画面丢失,其造成影响如下:
(1)无法实时监测测深仪是否正常运行。
(2)在数据采集过程遇到水流紊乱导致测量数据不佳等相关问题时,不能通过远程桌面及时对测深仪进行设置。
(3)实时监测水深断开,将无法预判无人遥控测量船搁浅碰撞等状况并及时进行干预措施。
基于存在的问题,需通过对无人遥控测量船数据系统进行升级改造,以进一步优化无人遥控测量船性能,便于日常使用。
1.2主要研究目标
无人遥控测量船已实现了远程控制、自动导航、主动避碰、精确测量、远程数据传输等多种功能,且船舶浮性、稳性、防水性等综合性能适应长江航道各种工况环境。但在实际应用中,远程数据系统存在一些问题,准备通过对无人遥控测量船数据系统进行升级,解决在两省交界特殊环境下的网络数据链接问题。
基于上述优化需求,确定本项目研究主要内容为:无人遥控测量船远程图传系统研究与应用。
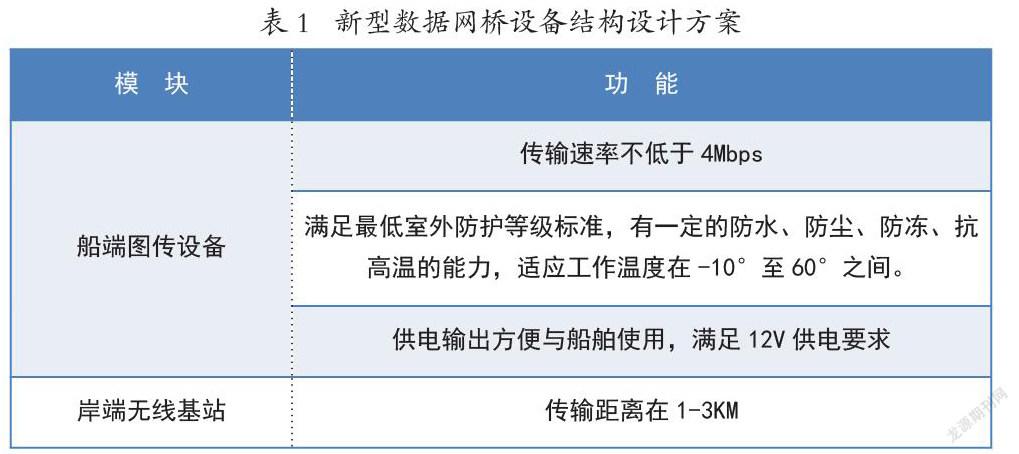
通过数据系统升级后的无人遥控测量船应该满足以下技术指标:
(1)数据链要求传输距离在2KM 以上,传输速度4Mbps 以上。
(2)传输要求稳定,搭配2个以上大功率 PA 射频功放,可实现2-3公里点对点及点对多点传输。
(3)供电输出方便与船舶使用,满足12V 供电要求。
(4)满足最低室外防护等级标准,有一定的防水、防尘、防冻、抗高温的能力,适应工作温度在-10°至55°之间。
(5)方便电脑查看数据情况。
基于上述存在的问题,需通过对无人遥控测量船数据系统的升级改造,进一步优化无人遥控测量船的使用。为解决测量船测深仪远程连接系统中连接图像清晰度较差,信号接收延时高易掉线等问题,我中心积极研究,探索各项远程监控系统,结合日常测量过程中遇到的各种无人船远程过程中出现的问题,最终采用基于新型数据网桥设备作为测深仪图传控制,该系统突破原本受网络供应商基站信号影响,即使在完全没有网络信号区域也能通过网桥设备实现远距离图传控制,且稳定性高、延迟低等特点,对于长江航道无人遥测具有重要意义。
2系统总体设计
本系统结合日常测量工作实际,基于现有无人遥控测量网络通信主要存在以下几个问题:
(1)由于岳阳处辖区,地处两省交界,长江两岸网络供应商基站架设密度低,网络信号太差。在测量过程中,测深设备网络经常掉线,不能实时监控,难以保证测量成果;
(2)舱内信号密闭,无法通畅发射和接收信号。
基于上述存在的问题,结合现有通讯技术,通过新型数据网桥设备对无人遥控测量船数据传输系统的改造,可实现大范围内无人遥控测量船测深系统远程监控功能。
选择的岸端无线基站具有体积小,便捷携带、续航时间长,并内置无线 WIFI 传输的功能特点。它轻量化的壳体设计,可单手携带,防护等级达到 IP66,防跌落强度为1m;同时内置 WIFI 路由模块,有线和无线均可进行连接。
选择的船端图传设备具有设备小巧、防冻抗高温的能力,固定安装在无人测量船内部,使用12V 直流供电,通过两根通讯天线与岸端无线基站连接。
通过船端图传设备及岸端无线基站实现远程监控测深仪系统,实时监控测深仪状态,避免出现测深系统故障后,测量人员无法及时发现,影响测量工作效率。
3主要功能及试验结果与分析
3.1主要功能实现
无人遥控测量船远程图传系统主要考核该系统以下指标:系统传输距离与速率、设备工作温度对系统的影响、设备功耗。
3.2试验结果与分析比对
为确保设备系统满足航道测量需求,对其进行了为期5个月的实际测试,结合实际测量进行了多次的设备调试测试效果如下:
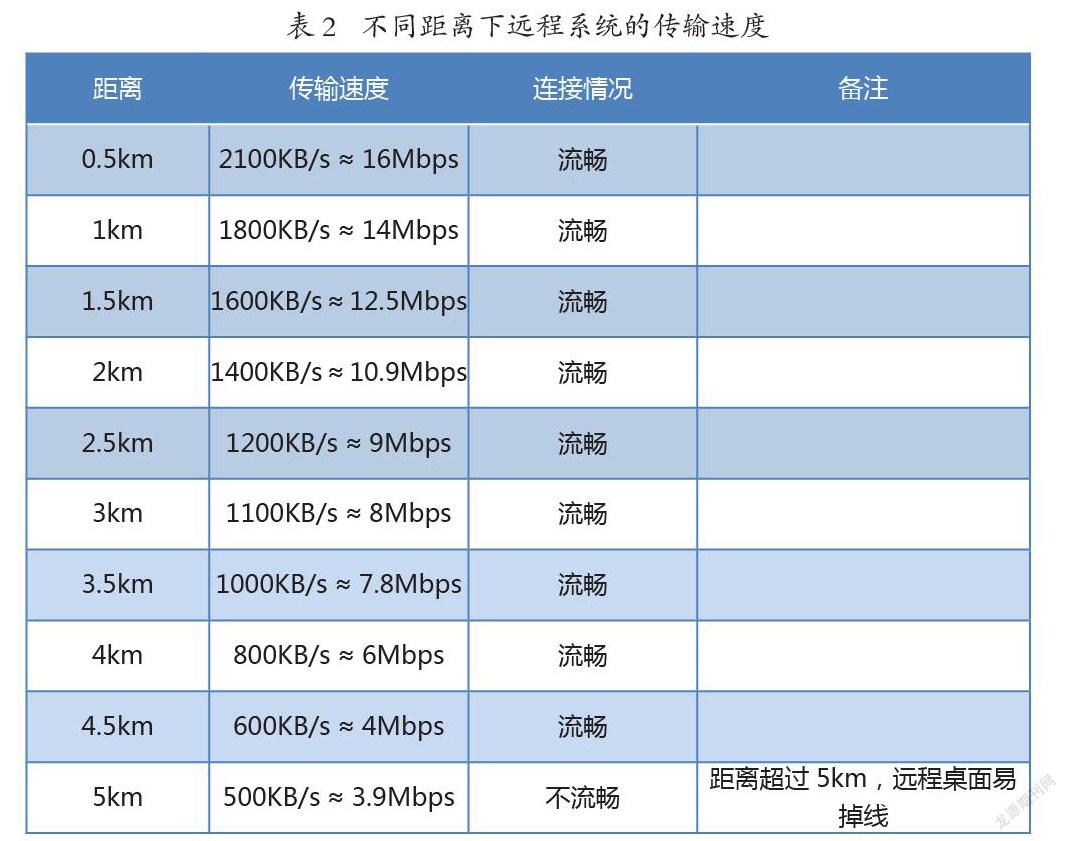
3.2.1传输距离与速率
设备无线连接完成后远程桌面连接成功,在远程监控电脑端打开 PCTATCP 软件,输入测试命令,默认情况下,单个数据包的大小为8192,数据包的个数为2048。此时,从无人船船载测深电脑到远程监控电脑的 TCP 传输速度为2311.71KB/s。满足传输速度4Mbps (512KB/s)以上的要求。
3.2.2設备工作温度对系统的影响
在设备通电成功后,远程桌面连接成功,通过红外线测温仪进行量测无人船舱内温度,通过早中晚温度对比(如下表3),查看远程桌面连接是否断开。
在通过五个月的试验,在日常测量工作环境下,设备系统运转正常,未出现因设备高温而断线的情况。3.2.3设备功耗
中心无人船航测1号搭载60AH 锂电池,将船端图传设备电源适配器插上无人船12V 电源输出排插,船端图传设备正常启动,远程桌面连接成功(图1)。通
过实际测试,充满电情况下整个系统可连续工作20小时,可满足日常航道测量生产作业需求。
4项目研究成果
4.1研究取得的主要成果
无人遥控测量船数据系统升级技术研究用新型船端图传设备和岸端无线基站,实现了专网点对点通信,解决了以往远程图传桌面易断开、无法实时监控的情况,极大的提高了生产效率和船舶自身安全。
4.2研究成果技术参数
(1)数据链要求传输距离在2KM 以上,传输速度4Mbps 以上。
(2)传输要求稳定,搭配2个以上大功率 PA 射频功放,可实现5公里点对点及点对多点传输。
(3)供电输出方便与船舶使用,满足12V 供电要求。
(4)满足最低室外防护等级标准,有一定的防水、防尘、防冻、抗高温的能力,适应工作温度在-10℃至60℃之间。
4.3技术创新点
通过使用新型船端图传设备和岸端无线基站,将原有的远程图传桌面由2KM 提高到5KM,传输速度稳定,极大的提高了测量实时监控的范围。
5成果应用情况
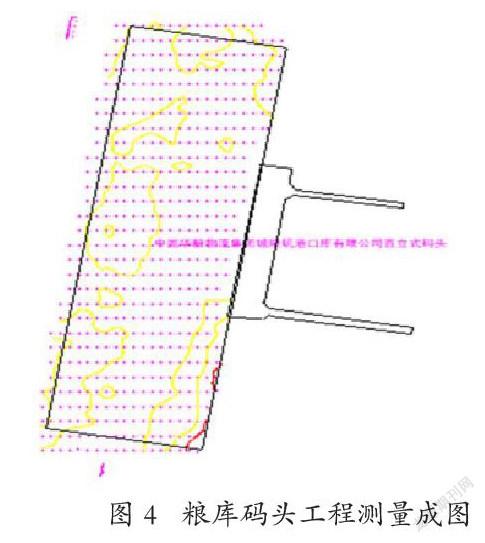
项目组将研究成果在遥测3号无人测量船进行了应用,并于2021年10月起在长江岳阳航道处航道测绘中心正式投入应用。使用无人遥控测量船搭载测深仪 HY1601和 GNSS 定位系统进行浅区补浅和码头测量。应用无人遥控测量船新设备进行枯水期补浅任务,参与完成了洞庭湖口边滩补浅、粮库码头测量、界牌2#丁坝补浅等航道测量。实地测量照片如下(图2至图6):
6经济和环境效益分析
6.1经济效益
(1)使用无人遥控测量船在改造升级之前,使用4G 网络进行远程桌面实时监控,测量过程中因断网掉线导致无法实时监控,无人遥控测量船水深记录无法保证,经常重复测量,在数据系统升级改造以后,网络连接稳定,能够全程实时监控,减少了重复测量及人工,提高了工作效率。
(2)数据系统升级后的无人遥控测量船减少重复测量次数之后,燃油消耗减少,降低了测量成本。
(3)在进行工程区测量时,数据系统升级后的无人遥控测量船多次使用,降低了测量快艇在工程区损坏螺旋桨和尾轴几率,保证了大型测量快艇的安全,提高测量工作的安全可靠性。
6.2环境效益
无人遥控测量船动力为汽油发动机,使用燃料为汽油,对比大型测量快艇的柴油发动机所使用的燃料柴油,具有一定的清洁环保效益,数据系统升级后的无人遥控测量船使用率大大提升,降低了大型测量快艇的测量使用,减少了柴油使用,降低长江碳排放污染。
7存在的问题与后期优化建议
(1)改进船控系统模块,用来代替飞控模块,解决飞控模块功能单一、接口不丰富、参数调整不理想的问题,使之更加适用于现代无人遥控测量船的控制。
(2)使用一体化地面站代替遥控手柄,简化操作按键,实现将岸端计算机、手操柄、数据链设备的集成,提高无人遥控测量船执行命令的准确性。
(3)现有移动 GNSS 设备防水等级不够高,在测量过程中容易造成设备进水,建议集成小型 GNSS 接收机,具有防水防雷等功能。
8应用前景及效果
长江岳阳航道测绘中心通过5个月的实际工作对无人遥控测量船远程图传系统研究与应用,通过不断改进系统设备调试,目前该系统操作简单、信号稳定,能实现远程监控无人船测深系统。在网络信号不稳定甚至无网络信号江面,能够完成测量过程实时监控对于长江航道数字化航道建设,航道测绘遥测具有重要的意义,值得推广并使用。
长江岳阳航道测绘中心遥控测量船远程图传系统已用于2021年度整治建筑物观测、码头工程等多项测量任务,在这过程中无人遥控测量船远程图传系统,极大的方便了测量人员的测量工作,未出现仪器设备掉线等问题,进一步提升了航道测量无人船应用技术,为航道测绘公益服务提供技术保障。
