虾蟹养殖污水处理装备的设计与开发
2022-05-02赵霞,李铭
赵 霞,李 铭
(江苏农林职业技术学校,江苏 句容 212400)
0 引言
随着经济发展水平的提高,我国水产养殖行业的发展规模不断扩大,高密度的集约化养殖也成为了现阶段水产养殖的发展趋势。现阶段,我国进行集约化水产养殖的对象多为螃蟹、虾等优质品种,这些水产品受欢迎程度高、需求量大,给养殖户带来相当可观的经济效益。然而在水产集约化的养殖模式下,大量饲料和鱼类代谢物的积累可能引起水体的污染,同时养殖排放的废水也能导致周围水体的富营养化,水体污染的问题愈发严重,如何加强集约化水产养殖污水处理成为现阶段的首要问题[1-5]。
目前国内外养殖污水处理技术大致分为物理、化学和生物修复技术。物理和化学的处理方法虽然见效快,但成本高、耗能大,而且容易造成二次污染,在应用过程中受到一定的限制。生物修复技术成本低、适用性广、具有生态效应,特别是使用不可再生材料和能源比较少,并且不会对环境造成二次污染,目前得到广泛应用。国内外很多学者针对这一问题开展深入研究,于金旗[6]将催化臭氧化—陶瓷膜分离相耦合技术,运用到水产养殖水循环中,实现污染物质分解,在一定程度上净化了水质。柳瑶、宋协法等[7]设计开发的旋转式生物流化床,利用生物净化过滤的功能,实现水产养殖污水中氨氮的转化,净化养殖污水。
本项目综合了各种污水处理技术改良与组合,通过多种净化技术与传感器检测技术,最大限度地改良水产养殖产生的污水,有效地促进集约化水产养殖产业的可持续发展。
1 系统总体方案设计
1.1 装备结构设计
虾蟹养殖污水处理装备由过滤系统与监测控制系统两部分组成,系统结构图如图1 所示。其中过滤系统由物理过滤、化学过滤与生物质过滤三部分组成,物理过滤为基础过滤,利用活性炭、过滤棉等材料实现水产养殖污水的初级过滤,对大颗粒杂质进行过滤,其次利用硝化细菌对水中的氨、氮等对水产品有害的物质进行分解。
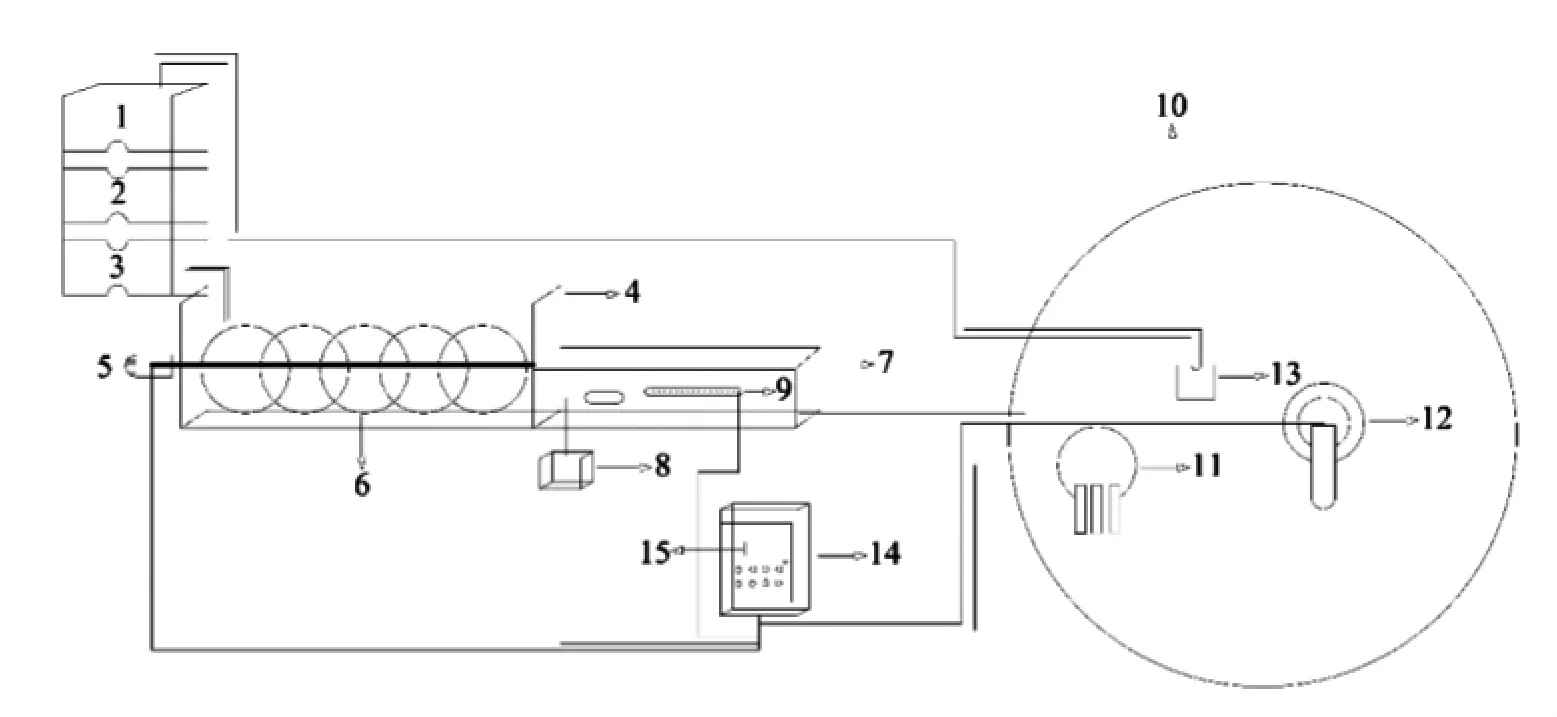
图1 系统结构
经过初级过滤的污水通过电动生物质转盘,利用分布在转盘上的微生物吸附污水中的有机物,并利用微生物分解有机物。最后污水经过臭氧和杀菌灯进行杀菌消毒,再重新输送到养殖区域。
装备控制对象有水泵、电动机、臭氧发生器、杀菌灯与增氧泵等。操作人员可以通过本地触摸屏对执行机构进行本地操控,也可以通过计算机WEB 端远程数据监测和操控执行机构。
为了解养殖水域内水质情况,增加了水质监测传感器,对养殖区域内的pH 值、EC 值、氨氮含量、溶解氧、浊度等数据进行实时监测。操作人员可在本地触摸屏上对数据进行监视,并通过查看历史曲线和历史报表了解水质净化效果。还可通过触摸屏设置限值,如设置当养殖水域内的溶解氧浓度低于65%时自动打开增氧泵进行增氧,当设置完成后,系统实时检测当前水域水质情况,当水内溶解氧低于65%时自动打开增氧泵进行增氧,达到预定值时停止工作,很大程度上减轻了现场管理人员的劳动强度。
1.2 控制系统设计
控制系统由控制、采集与远程调控三部分组成,控制系统框架图如图2 所示。其核心控制器为西门子的S7-1200PLC,CPU 型号为1214C,支持14 路数字量量输入,10 路数字量量输出,通过交换机与PLC 云网关和触摸屏通讯,传感器与SM1231 模拟量模块连接,该模拟量支持8 路模拟量输入,符合现场使用需求。
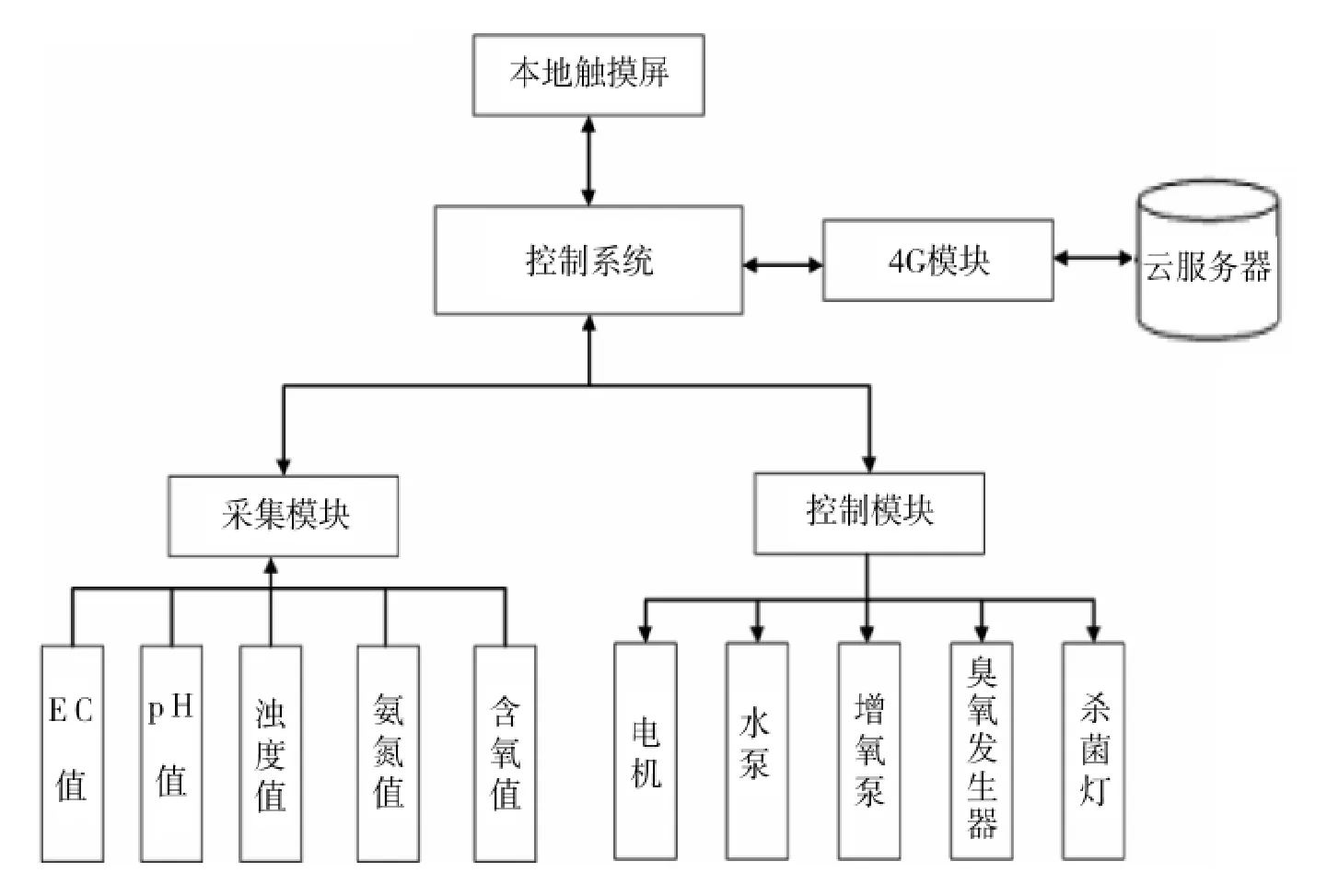
图2 控制系统框架
控制部分由PLC、继电器、交流接触器、执行机构等组成,执行机构控制线接入本地控制箱内,操作人员通过本地触摸屏和WEB 端操作页面控制电机、水泵、增氧泵等执行机构工作。
采集部分由PLC、模拟量模块、传感器等组成,传感器为模拟量类型,输出信号为4~20 mA,操作人员通过本地触摸屏和WEB 端操作页面实时监测当前养殖区域的水质情况,并结合控制系统对养殖水域的污水进行过滤等处理。
为方便管理人员对装备的操控,开发了远程调控系统。由PLC、网关、云服务器等组成,通过4G 模块建立本地与远程服务器的通讯,操作人员只需通过计算机打开指定的WEB 端页面,即可监测当前养殖区域的水质情况,并对现场执行机构远程操控。
2 系统上位机软件设计
系统上位机是实现人机交互的重要工具,上位机监测控制页面如图3 所示,上位机参数设置页面如图4 所示。操作人员可以通过触摸屏实时监测养殖区域的水质情况,可以通过历史曲线查看数据变化趋势,验证水质净化效率,也可通过操作区对现场装备进行远程操控。
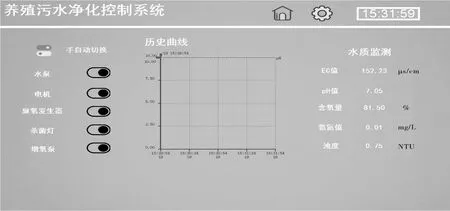
图3 监测控制页面

图4 系统设置页面
系统支持手动与自动两种操控模式,手动模式可以对每一种执行机构进行单独的操控,自动模式可以设置上下限值,随后打开自动模式,系统即根据预设定值进行自动调控。
3 结 语
虾蟹养殖污水处理装备利用多级净化原理,实现养殖污水高效净化,控制监测系统实现了养殖区域内水质状况监测与执行机构本地与远程操控。操作人员通过设定阈值实现装备自动闭环控制,在一定程度上方便了操作人员,提高了装备的智能化水平。后期可以开发相对应的模型控制算法,进一步提高装备智能化水平。
