北斗信标机在深海潜标中的应用
2022-04-29陈俊吉
摘要:随着我国海洋资源的开发和利用,浮标潜标以及海岸基的布放数量随之增加。由于海底环境比较复杂,近海渔民捕捞活动比较频繁,捕捞范围有所扩大,这对水下设备的安全构成了威胁。并且,在设备打捞回收时,复杂的海况会增加回收标体的难度,容易造成丢标事故。文章通过“GPS+北斗”双星定位,结合压力检测,设计并实现了一种可用于水下平台意外出水报警、出水后实时定位的卫星定位信标机系统,经多次应用证明其性能稳定可靠。
关键词:GPS;北斗双星定位;深海;系统
中图法分类号:TN967文献标识码:A
Application of Beidou beacon in deep sea submarine beacon
CHEN Junji
(715 Research Institute of China Shipbuilding Group,Hangzhou 310000,China)
Abstract:With the development and utilization of China's marine resources, the number of buoys, submarines and coastal bases is also increasing. Due to the complex seabed environment, the fishing activities of offshore fishermen are more frequent, and the fishing depth and scope have been expanded. These activities pose a threat to the safety of underwater equipment. In addition, during equipment salvage and recovery, complex sea conditions will increase the difficulty of recovering the standard body, which is easy to cause standard loss accidents. Through “GPS+Beidou” double satellite positioning and pressure detection, this paper designs and implements a satellite positioning beacon system which can be used for accidental water out alarm of underwater platform and real-time positioning after water out. After many applications, it has been proved that the performance is stable and reliable.
Key words: GPS, Beidou double star positioning, deep sea,system
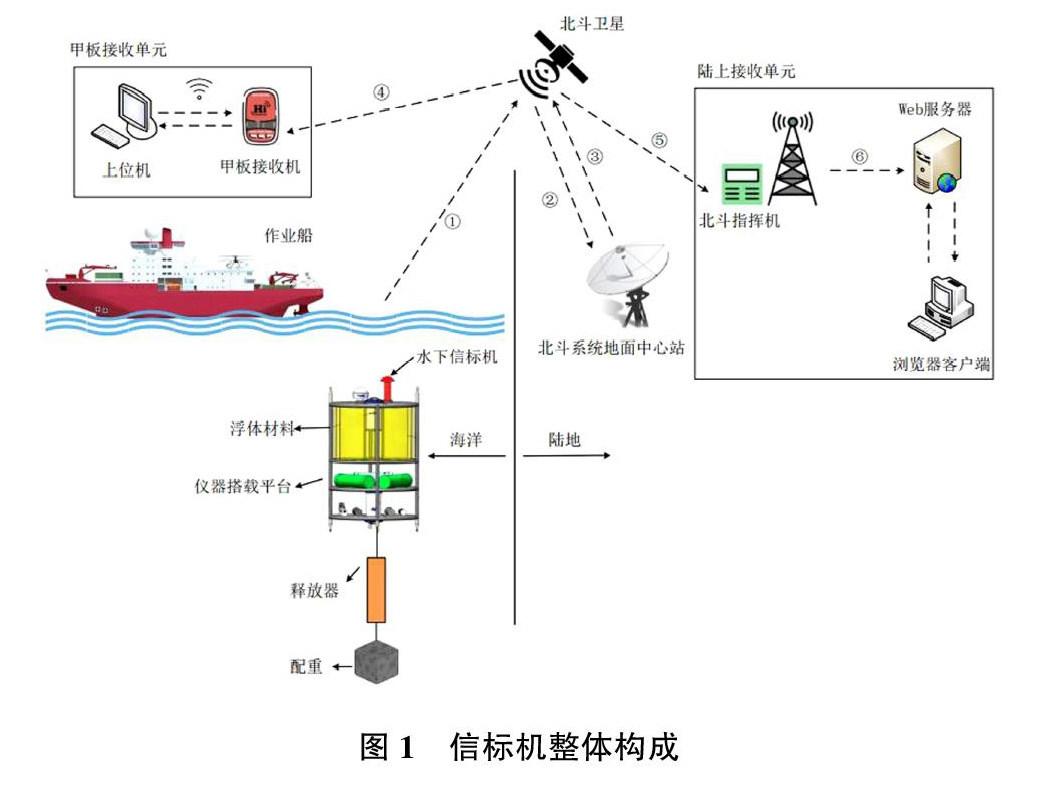
随着北斗定位通信技术的不断发展,定位精度逐步增加,北斗通信系统可进行短报文通信。2020年,北斗卫星信号完成全球覆蓋。目前,国内信标回收体系不完善,相应功能与国外主流产品还存在一定差距,在功能与回收服务方面有很大的提升空间。本文从海床基监测平台实际应用的需求出发,开发出一款续航时间长和定位精度高的北斗信标机。该设备使用压力传感器进行出水检测。为了配合布放,在信标机外侧安装了磁力开关。北斗短报文通信模块为 RD0538。信标机内部初始设置接收端北斗 ID、发射次数,将位置坐标信息经过加密后发射至卫星转发站。
如图1所示,通过将接收到的数据传输至服务器,可将信标机数据传输至客户邮箱或者手机终端,达到实时监测的目的。为了满足水下待机时间较长的需求,选择锂氩硫酰氯电池,一年期自放率2%。该设备配置了蓝牙配置串口,可通过手机与信标机内部蓝牙配对,方便参数设置和更改,并方便布放前检查设备。目前,该设备经过多次海试以及布放回收作业,多次实时反馈潜标意外上浮状况,通知业主进行回收打捞,帮助业主挽回经济损失,在现场回收作业中,可迅速报告作业船只精确位置,对目标物打捞起到很好的辅助作用。
1系统硬件设计
1.1系统组成
信标机回收系统由信标机主体和数据终端接收转发平台构成。信标机主体包括主控电路、北斗短报文配置电路、锂氩硫酰氯电池包、压力检测电路、GPS 加北斗双定位模块、天线和磁力开关[1]。天线置于信标机顶部,外壳采用聚甲醛材料,方便北斗信号传输。数据终端接收转发平台由北斗接收终端、串口线、上位机、上位机显控软件组成。信标机发出位置信息,接收终端收到位置信息后,可通过后台软件显示出来,若计算机连接互联网,也可以转发至用户邮箱或通过短信方式发出。
1.2信标机电路设计
1.2.1主控电路
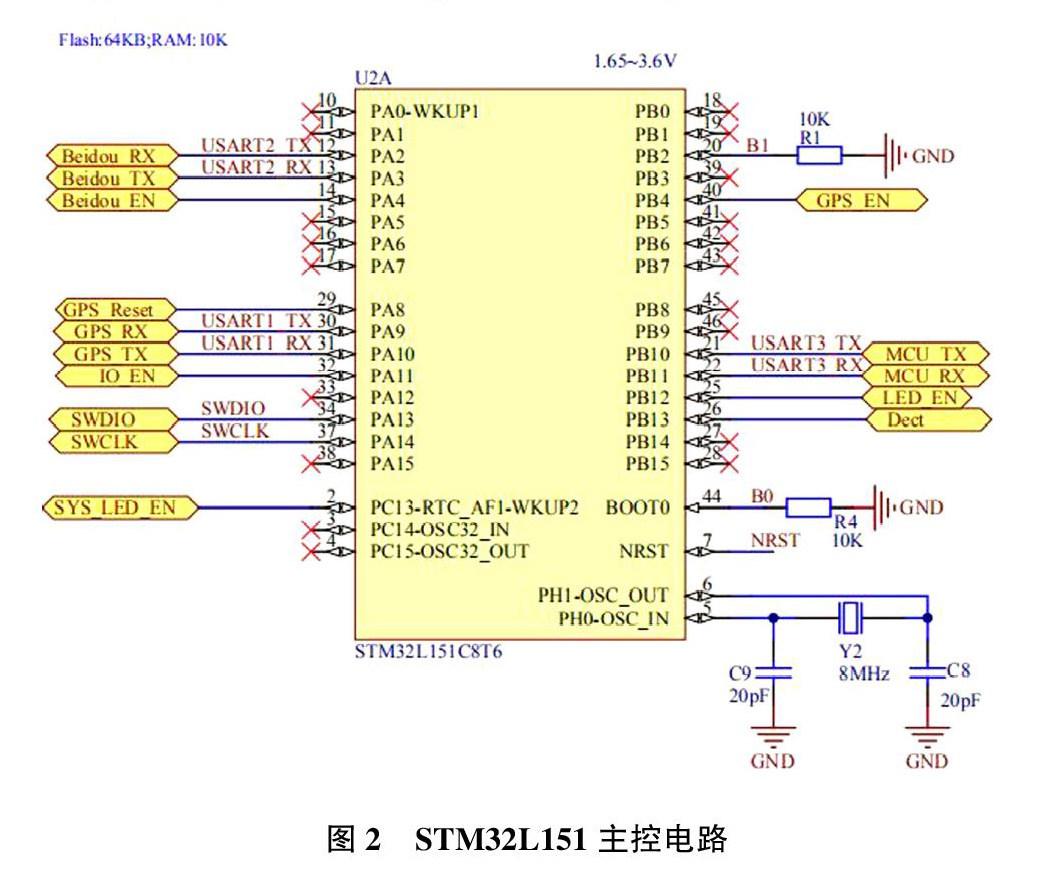
水下信标机以 STM32L151C8T6作为控制芯片,主要包括 MCU 模块、晶振电路、复位电路、启动模式电路和下载调试电路,如图2所示。
STM32L151主控芯片用3V 供电,UART2用于传输北斗短报文信息,UART1用于接收读取双模位置信息,UART3用于配置信标工作的参数信息,蓝牙连接也可以通过该串口进行访问
1.2.2双模定位电路
为了满足高精度的定位回收要求,采用了北斗加 GPS 双定位模式,其定位方式属于被动定位,在定位时无须用户向卫星发送定位申请,其工作频段为北斗二代的 B1频段和 GPS 的 L1频段。
定位模块选择了 JS?U810,由于不需要一直访问位置信息,如信标机出水后5min 需要获取一次位置信息,为了降低系统的功耗,采用肖特基二极管电路来控制定位模块的供电。当系统需要获取位置信息时,二极管导通,为模块提供电源,当获得有效数据之后断开模块电源连接,满足低功耗、长续航要求。
1.2.3卫星通信电路
系统选用的江苏博纳雨田通信模块 RD0538,这是一款 RDSS 单模通信模块,产品性能稳定。RD0538内部集成了射频收发电路、数字解调电路、运放及其他电路。该模块采用5V 供电,待机功耗≤0.65W,发射瞬间功耗≤15W 。IC_SCLK,IC_SD ,IC_SRSTIN 和 IC_VCC 为模块的 SIM 卡接口,在 RD0538模块与 SIM 卡接口处需要做防静电保护。VCC_PA 为 RD0538射频模块供电,RNSS 短报文发射瞬间电流可达2.5A ,根据设计要求,此电路需要满足2.7A 电流要求,并且要铺铜,走线要宽大。VCC_PA 外侧放置两个220uF 的钽电容,用来保证发射时电流要求;VCC 用来提供小信号供电,为了保证供电质量,在 VCC 外侧放置电容用于滤波,使电源纹波<50mv。
1.2.4供电电路设计
北斗短报文在发射瞬间的电流可达3A 左右,为了满足多种情况的供电需求,并且供电模块同时为 STM32和 RD0538、定位模块等器件供电,以及为防止北斗发送消息瞬间电压被拉低,供电模块选用德州仪器公司的 TPS54527芯片提供5V 直流电平输出,最大对地电流可达5A;输入端允许7V ~15V 电压,范围较宽,可满足三节或者四节锂氩硫酰氯电池组供电。
1.3信標机软件设计
信标机上电后,通过定位模块处理位置信息,通过短报文模块将数据发送至船载接收端。并且,为了方便调试,在信标机串口端加装了蓝牙接收模块,可通过 APP 远程进行数据设置。因项目要求,须每5min 上传一次位置信息,所以短报文发射间隔设定为5min 。
1. 3.1定位信息处理
定位模块具有 BDS/GPS 双模定位功能,数据格式满足 NMEA 3.0协议,在其基础上扩展为满足北斗通信定位协议[2]。对比通信内容,其中 RMC(推荐定位信息)适合作为信标机的位置信息来源,其数据帧结构包含 UTC 时间、地理位置信息等,其输出格式为:
$GPRMC ,time ,status ,Lat,N ,Lon ,E ,spd,cog,
date mv mvE mode ?cs
位置信息处理代码为:
p_result=strtok(NULL,delims);
if(strstr( p_result,"."))
strcpy( str_Latitude,p_result);
p_result=strtok(NULL,delims);
if((strcmp( p_result,"N")==0)||( strcmp( p _
result,"S")==0))
strcpy(str_NS,p_result);
p_result=strtok(NULL,delims);
if(strstr( p_result,"."))
strcpy(str_Longitude,p_result);
p_result=strtok(NULL,delims)
if((strcmp( p _result,"E")==0)||( strcmp ( p _ result,"W")==0))
strcpy(str_EW,p_result);
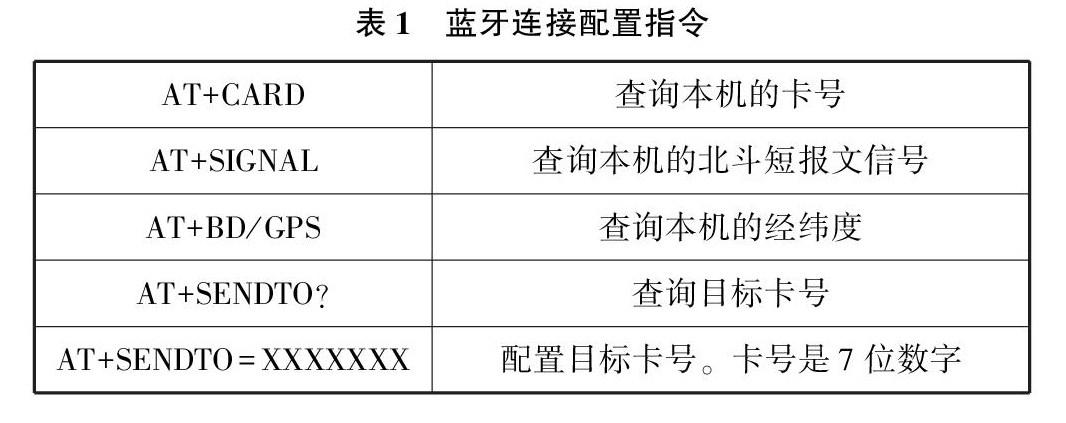
1.3.2蓝牙远程配置处理
为了方便参数设置,采用 INI 驱动为蓝牙设备参数配置[3]。用 APP 打开蓝牙,打开 HC_BLE 助手软件,连接编号为 HC?08的蓝牙接口。原始参数设置可写在 E2 PROM 内,信标机上电后,INI 可从 E2 PROM 内读取设置参数,并且将原始参数初始化。表1为蓝牙连接配置指令。
INI 调用示例代码:
instance:INI ?
dst_num:uint32_t
freq:uint32_t
tel_num:uint32_t
getInstance():INI ?
Load_Cfg(cfg:Cfg_Info&):void
Cfg_Process():void
Set_Default_Dst():void
Set_Default_FREQ():void
INI()
read(addr:uint32_t):uint32_t
write(addr:uint32_t,data:uint32_t):void
2信标机工作性能测试
2.1电池耗尽测试
考虑到信标机在水下工作时间较长,并且其发射瞬间电流较大,所以选择了功率型的锂氩硫酰氯电池组,选用9节锂氩硫酰氯26500电池,采用三串三并的连接方式,输出电压11V 左右,单节电池容量为8000mAh ,总计72000mAh 。信标机待机功耗为0.5W,发射瞬间功耗为10W(发射瞬间0.2s)
单次5min 消耗电量为0.043wH=11.61mAh ,假设其放电效率为80%,可计算该信标机原则上可发射4961次,能够连续发射17天。
在实际应用过程中,该信标机搭载设备在东海某地意外上浮,接收终端可接收18天左右的完整数据,定位周期为5min。
2.2信标机海试实际应用
2021年8月,搭载某海床基项目,在南海某地进行海试,能够满足设计使用需求,能够在上浮5min 内回传位置信息,回传后的位置信息与船上的 GPS 位置信息几乎一致,偏差在5m 内,可以精确地找到坐标位置。2022年2月,某搭载平台被渔网意外打捞,根据信标机位置信息准确定位到相应渔船,在渔船靠岸前准确联系到船长,为国家挽回数百万元的经济损失。
3结论
经过实验论证以及实际应用,该信标机拥有长续航、低功耗、易操作等优势,通过了各项质量检查,可在海底500m 内进行长时间布放,可在水下续航达5年之久,定位精度可在5m 内,方便潜标找回,搭载定时释放装置,可对原有的脱钩释放系统进行完善,大幅度提高了潜标的回收率。设备若被意外打捞,也可进行远程跟踪,将位置信息发送至业主手机或邮箱,大幅度减少信标终端的维护成本。
参考文献:
[1]郑俊华,谭秋林,秦小龙.基于两路 GPS 信息接收和切换的无线信标机设计[J].电子器件.2015,38(4):863?867.
[2]何方城,甄国涌,单彦虎.基于北斗通信的小型无线信标机设计[J].电子器件.2020,43(1):15?19.
[3]欧阳育华,张威.基于北斗卫星导航系统的救生信标机[J].江苏科技信息.2017(19):41?42.
作者简介:
陈俊吉(1992—),硕士,助理工程师,研究方向:控制工程。
