基于多层神经网络的直驱风机低穿控制参数辨识
2022-04-28张志轩贺政华陈俊超
赵 康,张志轩,周 宁,王 亮,贺政华,陈俊超
(1.国网山东省电力公司电力科学研究院,山东 济南 250003;2.国网山东省电力公司,山东 济南 250001;3.山东大学电气工程学院,山东 济南 250061)
0 引言
随着碳达峰、碳中和“3060 目标”的提出和持续推进,能源开发利用的低碳化、绿色化将成为必然。在众多低碳能源的开发利用中,风力发电是一种应用较为广泛、技术较为成熟的能源开发利用方式[1]。风电机组装机容量在电力系统中所占的比例越来越高,其运行特性对电力系统安全稳定运行的影响也越来越大[2]。
为应对风电机组大量接入带来的不利影响,世界各国都对风电机组制定了严格的入网要求,其中低电压穿越能力往往被认为是其中最重要的一项[3-4]。针对风电机组低电压穿越能力的研究已经得到了广泛的开展并取得了可观的研究成果。文献[3-5]阐述了风电机组低电压穿越的原理和控制策略,并通过仿真表明风电机组低电压穿越能力对区域电网承受故障扰动的能力影响很大。文献[6-8]介绍了实现风电机组低电压穿越运行的技术要点和关键问题,并分析对比了现有的低电压穿越技术方案。文献[9]分析了发生低电压穿越时风电机组保护控制措施与系统动态特性之间的联系,探讨了撬棒保护电阻取值和投切控制策略。文献[10]分析了风电机组低电压穿越期间变流器直流电压波动的原因,提出了一种新型的有功和无功协调控制策略。文献[11]针对电网对无功控制和低电压穿越能力的技术要求,提出了一种改进型功率变换控制方法。文献[12]研究了电网故障下永磁直驱风电机组的运行特性以及提高其低电压穿越运行能力的原理,提出一种适用于采用双脉宽调制变换器并网的永磁直驱风电机组低电压穿越运行控制方案。通过以上文献研究可知,低电压穿越能力作为风电机组本身的固有属性,取决于风电机组采取的低穿控制策略及其对应的低穿控制参数。出于商业机密的原因,风电机组厂家一般不会公开具体的低穿控制策略和参数。然而作为电网运行方式工作人员,鉴于风电机组低穿能力对电网安全稳定运行越来越大的影响,迫切需要对风电机组的低穿控制策略和参数有较为精准的把握。文献[13]针对内埋式永磁同步风电机组,提出了一种基于遗传算法的参数辨识方法,但该方法只能辨识风电机组的稳态运行参数。因此,根据风电场提供的风电机组低穿试验曲线,辨识风电机组采取的低穿控制策略和参数,对于电网运行方式数字仿真和辅助决策,具有十分重要的现实意义。
在直驱风电机组低电压穿越一般控制模型的基础上,提出一种基于多层神经网络的低电压穿越控制参数辨识方法。首先,基于经典的M-P 神经元模型和Sigmoid 激活函数,结合直驱风机低电压穿越一般控制模型,构建多层神经网络。然后,根据收集得到的实际风电场直驱风机低穿试验曲线和对应的低穿控制参数,构造多层神经网络的训练数据集,采用标准BP 算法训练得到所需多层神经网络模型。最后,通过对某型号直驱风电机组的案例研究,验证所提多层神经网络低穿控制参数辨识方法的有效性。
1 直驱风机低电压穿越控制模型
不同型号直驱风电机组的具体低穿控制策略及对应的控制参数千差万别,但基本的低穿控制原理[14-15]是一致的。因此,可以采用统一的直驱风机低电压穿越控制模型来描述。采用统一的直驱风机低穿控制模型,以不同的控制参数来表征不同型号直驱风机的不同低穿性能,也为电网运行方式的数字仿真提供了极大的便利。
直驱风机发电系统的基本结构如图1 所示。在正常稳态运行情况下,机侧换流器以最大功率点跟踪的方式控制直驱风机的有功功率,而网侧换流器则控制与电网交换的无功功率。当电网发生故障或扰动引起机端电压降低到设定值以下时,直驱风机发电系统进入低电压穿越运行状态,将会调整有功和无功的出力水平,并保持并网运行。直驱风机的低电压穿越能力必须满足一定的标准要求,现行的并网标准如图2 所示,当机端电压跌落水平在图中曲线以上时,必须能够维持并网运行,并对电网提供一定的无功支撑。
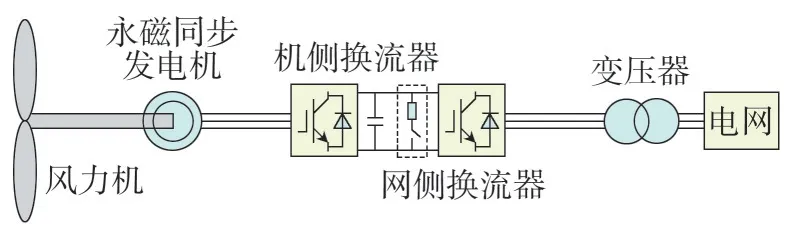
图1 直驱风机发电系统基本结构

图2 直驱风机低电压穿越能力标准要求
直驱风机发电系统的有功和无功控制是相互解耦的,且分别通过对机侧换流器的有功电流控制分量和网侧换流器的无功电流控制分量进行控制,典型的直驱风机稳态有功和无功控制逻辑如图3所示。
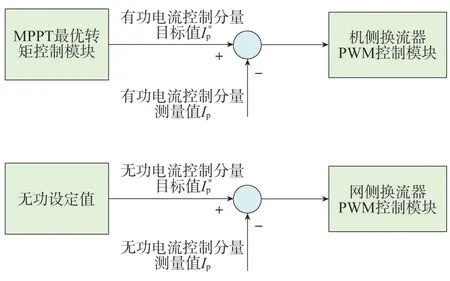
图3 典型的直驱风机有功和无功控制逻辑
参照图3 所示稳态控制逻辑,直驱风机低电压穿越一般控制模型可按照如下方式建立。
1)低穿期间的有功采用控制有功电流控制分量的方式,具体如式(1)所示。

式中:K1p、K2p和K3p为有功电流计算系数;Vt为机端电压;Ip0为低穿初始有功电流控制分量。
2)低穿期间的无功采用控制无功电流控制分量的方式,具体如式(2)所示。

式中:K1q、K2q和K3q为无功电流计算系数;V0为低穿初始电压;Iq0为低穿初始无功电流控制分量。
2 多层神经网络模型的建立与训练
神经网络在电力系统方面的应用研究已经取得了丰硕的成果[16-20],通过对研究对象建立合适的神经网络模型,并以大量的样本数据加以训练,便可以由原始数据准确、快速地得到最终结果。
2.1 多层神经网络模型的建立
神经网络最基本的元素是神经元模型,其可以将输入值按照一定的规则映射为输出值,其中M⁃P神经元模型是最为经典、也是应用最为广泛的一种。M⁃P 神经元模型接受来自n个其他神经元传递来的输入信号,这些输入信号按照各自的权重计算总输入值并与神经元的阈值比较,然后通过激活函数产生输出信号,具体如式(3)和图4所示。

图4 M⁃P神经元模型

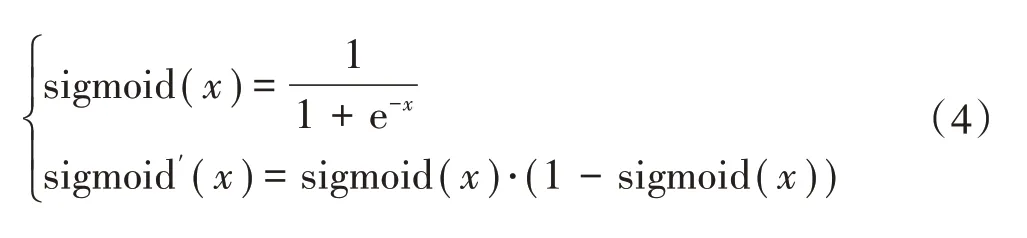
M⁃P 神经元模型的激活函数可以采用不同的形式,其中Sigmoid 函数因为具有良好的微分性质,因而得到了广泛的应用。Sigmoid 函数的微分性质如式(4)所示。
选用以Sigmoid 函数作激活函数的经典M-P 神经元模型作为多层神经网络的基础。建立该神经网络的一般原则为:
1)输入层的确定。风电场低穿试验测试数据一般包括三相电压曲线、三相电流曲线、有功曲线、无功曲线、有功电流曲线以及无功电流曲线。考虑电网发生三相对称故障引起直驱风机进入低穿运行的情况,为实现参数辨识只需要A 相电压曲线、有功电流曲线和无功电流曲线即可。将这三条曲线数据预处理并提取特征信息后即可作为多层神经网络的输入。曲线特征信息包括A 相电压、有功电流以及无功电流各自的低穿初始值和低穿稳定值,因此多层神经网络的输入层由6个神经元组成。
2)隐含层(以下简称隐层)的确定。根据直驱风机低电压穿越一般控制模型的数学公式,选用双隐层前馈神经网络即可满足参数辨识的需要。隐层中神经元的个数一般按照经验指定,并可在神经网络训练的过程中加以调整,因此在训练前可暂将两个隐层的神经元个数均取为8个。
3)输出层的确定。神经网络的输出,即参数辨识的结果,包括式(1)和式(2)中所列的6 个计算系数,因此多层神经网络的输出层由6个神经元组成。
按照以上原则建立的神经网络模型如图5所示。
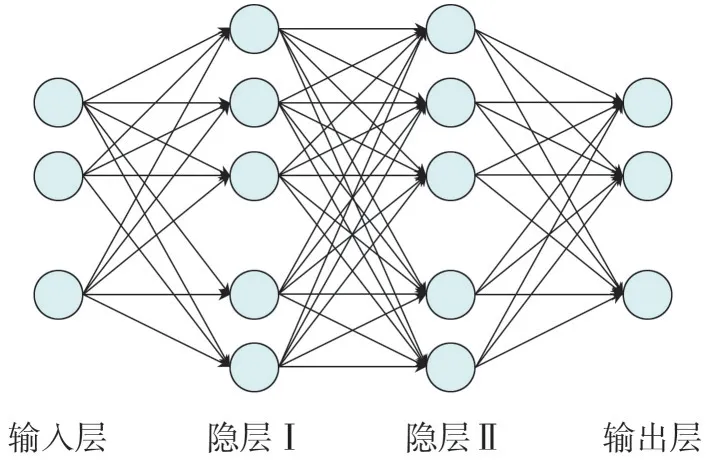
图5 用于低穿参数辨识的双隐层前馈神经网络
2.2 多层神经网络模型的训练
神经网络的训练需要指定学习算法和训练数据集。训练数据集可通过已经收集到的直驱风机低穿试验数据处理得到,学习算法采用标准BP 算法。标准BP 算法是迄今为止最为成功的神经网络训练算法,实际应用中的大部分神经网络都使用该算法进行训练,其基本原理介绍如下。
假定第k个训练数据(xk,yk),由神经网络计算得到对应的输出为,因此神经网络的均方误差为

式中:l为神经网络输出层神经元的个数;和分别为第k个训练数据的输入量xk对应的第j个输出的实际值和计算值;系数的引入是为了后续微分计算方便。
神经网络训练的目的是得到最优的神经元连接权重和阈值的组合,使得误差Ek最小。因此可以采用梯度下降策略,以误差目标的负梯度方向对相应的参数进行调整。针对式(5)定义的均方误差,以输出层与最后隐层神经元之间连接的权重调整量为例说明如下。

式中:ωhj和Δωhj分别为最后隐层中第h个神经元与输出层第j个神经元之间的权重和权重调整量;η为学习率,须人为指定,取值范围为η∈(0,1)。
定义输出层第j个神经元的加权输入值为

式中:q为最后隐层的神经元总数;bh为最后隐层第h个神经元的输出。
根据微分计算的传递原则,并结合式(7),式(6)可进一步推导为

由于采用Sigmoid 函数作为激活函数,考虑其微分特性,权重调整量Δωhj可最终推导为

类似地,可推导阈值调整量为

式中:θj和Δθj分别为输出层第j个神经元的阈值和阈值调整量。
通过以上方法可从输出层向输入层逐步反向推算出神经网络中各神经元的阈值调整量和神经元之间连接的权重调整量,从而更新整个神经网络。不断重复上述正向计算误差和反向修正参数的过程,最终将使神经网络的输出结果与训练数据之间的误差减小到设定误差标准之内,此时即可认为神经网络训练完成。通过标准BP 算法训练神经网络的具体过程如图6所示,设定误差标准为ε<0.01。

图6 标准BP算法的训练过程
3 算例研究
以待并网的某型号直驱风机为例检验所提基于多层神经网络的低穿控制参数辨识方法。该型号直驱风机半实物试验现场如图7所示,其半实物试验低穿录波数据将用作后续检验参数辨识方法有效性的基准。

图7 某型号直驱风机的半实物低穿试验现场
按图5 所示神经网络结构,采用标准BP 算法进行训练。由于训练数据集是通过收集到的某实际地区电网107 种不同型号直驱风机低穿试验数据处理得到,样本数量有限,因此需要反复多次训练,最终可以得到满足训练数据整体误差ε<0.01 的神经网络。用训练完成的神经网络处理某型号直驱风机的低穿试验数据。由于低穿试验数据包括机端电压分别跌落至20%、35%、50%和75%额定电压时的4 组数据,应用神经网络进行处理将得到4 个不同的参数辨识结果。分别将4 组参数代入式(1)和式(2)所示的低穿控制模型,进行不同低穿工况下的数字仿真并计算仿真结果与半实物试验数据的误差。选取误差最小的一组,将其作为最终的参数辨识结果。
采用最终参数辨识结果后,某型号直驱风机的有功和无功响应特性仿真曲线与半实物试验曲线的对比情况如图8—图11所示。

图8 电压跌落至20%额定电压低穿有功和无功响应特性对比

图9 电压跌落至35%额定电压低穿有功和无功响应特性对比

图10 电压跌落至50%额定电压低穿有功和无功响应特性对比

图11 电压跌落至75%额定电压低穿有功和无功响应特性对比
由图8—图11 可见,采用多层神经网络辨识所得低穿控制参数后,直驱风机的低穿仿真曲线与半实物试验录波曲线的吻合度较高,由此可充分验证所提出的基于多层神经网络的直驱风机低穿控制参数辨识方法的有效性。
4 结语
直驱风机在新并网风机中的比例越来越高,其低穿特性对电网运行的影响也越来越大。在直驱风机低穿一般控制模型的基础上,提出了一种应用多层神经网络辨识直驱风机低穿控制参数的方法。应用该方法对某型号直驱风机进行了案例分析和对比研究,验证了所提方法的有效性。
由于本文中神经网络训练数据可用样本较少,导致最终神经网络的训练过程较为漫长,效率不高。因此,进一步提高神经网络的训练效率,快速得到可用的神经网络模型,将是下一步探索的方向。
