大跨越输电线路巡检机器人系统的设计
2022-04-28蔡光柱郑鹏超
蔡光柱 杨 振 郑鹏超
大跨越输电线路巡检机器人系统的设计
蔡光柱 杨 振 郑鹏超
(北京国网富达科技发展有限责任公司,北京 100071)
大跨越输电线路往往地处台风多发、振动强烈、盐渍严重等恶劣自然环境中,为解决大跨越输电线路日常无法人工巡检的难题,本文设计一款大跨越输电线路巡检机器人系统。该巡检机器人本体通过越障装置可从塔头跨越到地线,进而沿地线开展巡检工作;两端塔头上安装有智能充电巢,可对机器人电池进行无线充电,解决机器人野外充电问题;RTK差分定位系统配合高精度行走码盘,可实现机器人厘米级别精确定位,提高了机器人图片、视频采集的准确率;通过4G模块,机器人可将自身状态、输电通道运行信息、图片、视频等传输到服务器远程监测平台,便于巡检人员远程实时查看线路运行是否正常。该机器人有效降低了输电线路巡检人员的劳动强度和工作危险性,实现了大跨越输电线路的高精度自动化巡检。
输电线路;大跨越;物联网技术;无线充电;差分定位系统;远程监测系统
0 引言
为实现远距离大功率的电能输送,近年来国家电网公司大规模建设特高压输电网,输电线路经过的地理环境越来越复杂,往往地处台风多发、振动强烈、盐渍严重等恶劣自然环境中,输电线路日常巡检面临巨大难度,有些大跨越线路甚至无法巡检。
受自然条件限制,往往无法巡检大跨越输电线路,即使采用人工巡检,受视角影响,也无法检查高层设备;同时受巡视人员人数、技术水平及其他因素影响,巡视质量参差不齐,对线路的巡视存在一定的局限性,无法实现全天候实时监测。在台风、雨雪等特殊天气条件下,人工巡检存在较大安全风险,甚至无法开展人工巡检;而且人工巡检存在工作效率低、监测质量分散、手段单一等不足,检测的数据也无法准确、及时地接入信息管理系统。目前各检修公司面临工作人员老龄化、新进员工少、巡检人员严重不足的窘境,人工巡检数据无法数字化,不利于后期处理。
为解决上述诸多问题,欧、美、日等众多国外研究机构和国内一系列厂家均对输电线路机器人进行了研究,20世纪90年代,加拿大魁北克研究人员提出“电力巡检机器人”的构想,日本东芝等公司和欧美科研院所也开始相关的科技研发工作。同时,我国科研人员也对此做了一系列研发工作。刘贞瑶等设计了一种新型越障装置,解决了输电线路机器人无法越障、无法实现全线路巡检的问题,采用无线充电的方式,实现了锂电池的野外无接触式充电,提高了巡检机器人的巡检范围[1]。多年来,吴功平团队对输电线路巡检机器人进行系统性研究,对机器人的控制系统、越障方法、定位系统等进行了大量研究,提出一系列解决方案[2]。彭向阳等研发了穿越式、跨越式两类巡检机器人,提出机器人行走路径改造方法,首次设计了机器人自动上下线装置,并完成了机器人全自主巡检系统的研 制[3]。李睿等引入基于物联网框架的多传感器融合算法,提出基于自抗扰控制技术的多机协调控制策略,并验证了其可行性[4]。
受常规人工巡视和视频监控的限制,无法发现大跨越输电线路导线上部和杆塔顶部的缺陷,难以实现精益化巡视,有必要采用巡检机器人代替人工登塔巡检。现有的输电线路巡检机器人没有针对大跨越线路进行设计,无法适应大跨越输电线路;且普遍存在功耗大、野外无法充电、定位不准确、检测方式单一等缺点。综合以上研究,结合物联网低功耗技术,本文设计一种功耗低、能够野外充电且定位精度高的大跨越输电线路巡检机器人系统[5],该机器人可实时采集大跨越输电通道中金具、绝缘子、杆塔和线路走廊等信息,及时发现早期缺陷,从而实现大跨越输电线路自动化巡检,降低巡检人员高空作业的危险性,可以有效解决现有大跨越输电线路人工巡检存在的问题,实现大跨越输电线路数字化管理。
1 总体设计
本文设计的大跨越输电线路巡检机器人系统组成如图1所示,主要包括RTK(real-time kinematic)差分定位[6]系统、充电驻留巢穴[7]、越障桥和机器人本体四部分。RTK差分定位系统安装在塔头最高处,用于接收GPS信号,机器人轮子上安装有Sick高精度码盘,与RTK差分定位系统结合,可以实现厘米级别的精确定位,便于实现机器人自动巡检时的预置位设置;充电驻留巢穴前端装有无线充电发射端,机器人利用码盘和红外装置到达驻留巢穴,实现无线充电的精确对准,当发射端电压符合设定值时,开启平衡充电模式,对机器人电池过程进行智能化管理,解决电池组和电池相关的故障,如过电压、欠电压、过电流、短路电流、过载等。采用无线充电方式对机器人电池充电,解决了传统有线充电方式易短路、接触节点易磨损、易产生火花等问题。
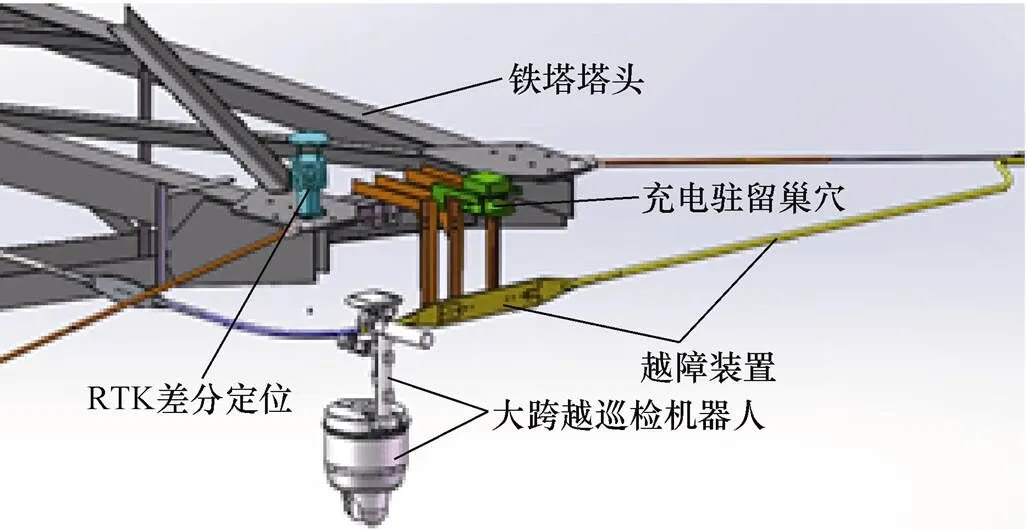
图1 机器人系统组成
巡检机器人本体结构示意图如图2所示,通过安装在塔头的越障装置可以跨越地线上的防震锤行走到地线上,在大跨越铁塔档距之间行走[8];为解决大跨越线路爬坡角度大的问题,选用Maxon高功率电机,配合Escon50/5驱动器,电机效率高于90%,最高功率可达170W;主动轮内侧装有高摩擦系数的橡胶,从动轮和主动轮上下夹紧地线可以增大主动轮与地线之间的摩擦力,增强机器人的爬坡能力。为降低地线、杆塔振动带来的不利影响,提高图片、视频的采集质量,采用双光三轴维稳云台。该维稳云台[9]带有红外双光摄像头,对导线和地线进行拍照,可以实时监测线路温度变化;所采集图片通过图传模块保存到地面手持端,巡检人员可及时查看大跨越线路运行是否正常,另外,通过4G模块可将机器人自身状态和线路运行数据传回电力公司集控中心,便于巡检人员远程监测。
图2中从动轮位于地线下方,在从动轮电机的驱动下可以上下运动,与主动轮一起构成一个封闭框,保证机器人在任何时候不脱线,避免发生坠落事故;辅助摄像头具有固定的向上视角,用于观察地线及机器人主、从动轮的运行情况;机器人的外形采用圆弧形设计,有效降低了风阻。
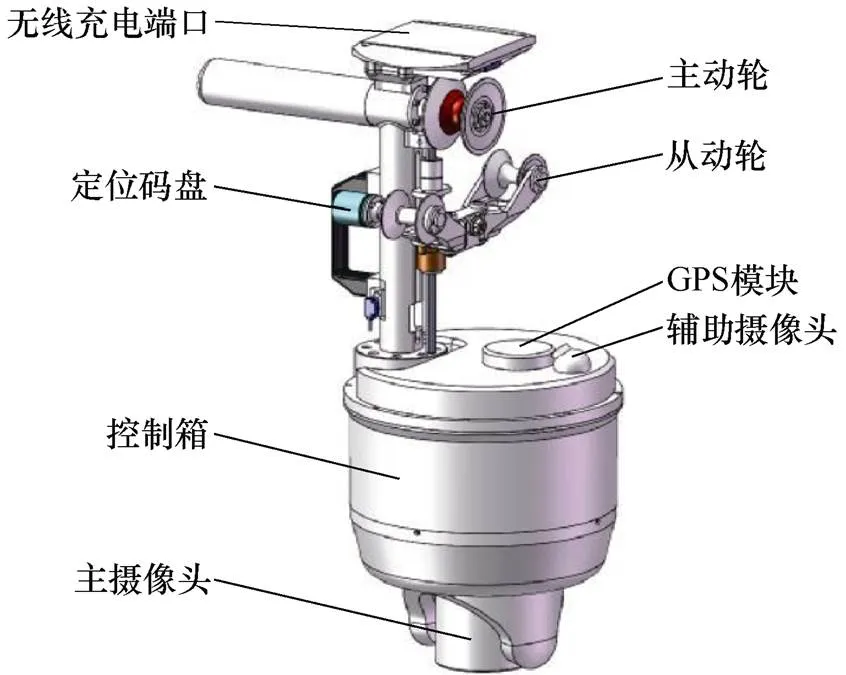
图2 巡检机器人本体结构示意图
2 超低功耗模式设计
为有效延长锂电池的使用寿命和工作时间,大跨越输电线路巡检机器人本体采用低功耗设计[10]。硬件采用最新STM32L5超低功耗MCU芯片,其专有的超低功耗技术可在性能和功耗之间实现最优平衡,是物联网节能设计中一款应用广泛的微控制器。
该机器人控制系统在软件方面使用双系统设计,在STM32L5芯片上移植物联网操作系统RT- Thread对巡检机器人本体的本地通信、运动控制、传感器采集及云台控制等任务进行合理有效分配与管理,尽量降低系统功耗;ARM芯片上移植使用Linux系统,对巡检机器人的自动巡检、4G通信、图片采集、发送及自动充电等任务进行管理;当巡检任务结束或者机器人运动到充电巢穴时,进入非工作状态关闭各传感器、本地通信、图像传输、电机、云台等模块的电源,仅保留与Linux系统及后台服务器的通信模块,使机器人系统进入低功耗休眠状态,从而最大程度上降低机器人的功耗,有效延长电池工作时间,扩大机器人的巡检半径[11]。当机器人接收到巡检指令或者满足巡检任务开启条件时,机器人打开各传感器、本地通信、图像传输、电机、云台等模块的电源,进入自动巡检状态。相比于传统巡检机器人,本文采用低功耗模式设计,机器人系统功耗大大降低,延长了巡检机器人电池使用寿命,巡检半径扩大三倍以上,可以达到大跨越输电线路自动巡检的要求。功耗对比见表1。
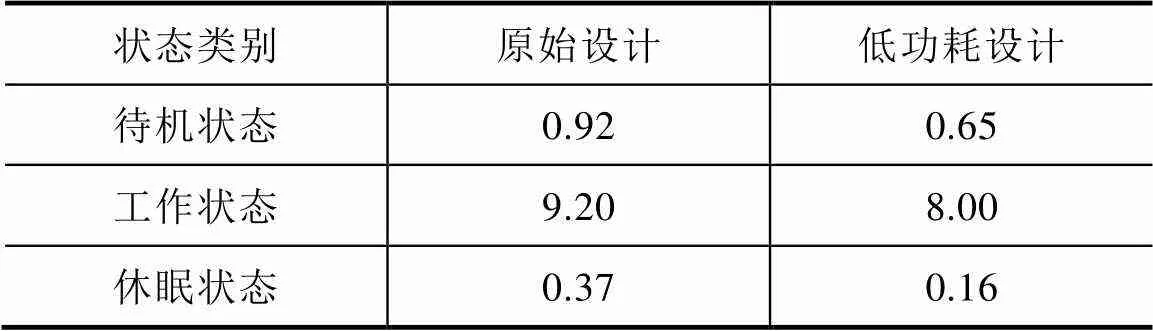
表1 功耗对比 单位:W
3 控制系统设计与研究
3.1 机器人本体硬件设计
该机器人的控制系统采用嵌入式双控制系统设计[12-13],巡检机器人本体能够利用越障桥行走到地线上,进而在大跨越输电线路档距之间无障碍行走。当巡检机器人本体行走到越障桥时,巡检机器人本体携带的红外开关能识别越障桥,将信号传给STM32控制系统,调节压力传感器夹紧力,根据越障桥机械结构、现场风速、风力大小,调整过桥控制算法参数,实时调节电机输出功率和压力传感器夹紧力大小,控制机器人主动轮电机运行方向和速度,顺利平稳行走到地线上;在地线上行走时,根据地线爬坡角度,实时调节电机输出功率和速度,最大爬坡角度可达50°,满足大跨越线路的要求。考虑到大跨越输电线路巡检机器人的工作场景,无线通信必须确保其具有低功耗、高可靠性,综合以上考虑,选用SX1262 LoRa芯片,用于巡检机器人本体与地面手持端进行无线通信,其发射功率可调,传输距离长达十几公里。该巡检机器人本体可以跨越线路杆塔、防震锤等设备,采用机器人过桥控制算法,巡检机器人本体能平稳跨越越障桥,可在地线上实现上坡、下坡、越障等功能,进而实现大跨越线路内自动化巡检,如采集线路运行信息、定点采集图片、视频等。大跨越输电线路巡检机器人本体硬件设计如图3所示。
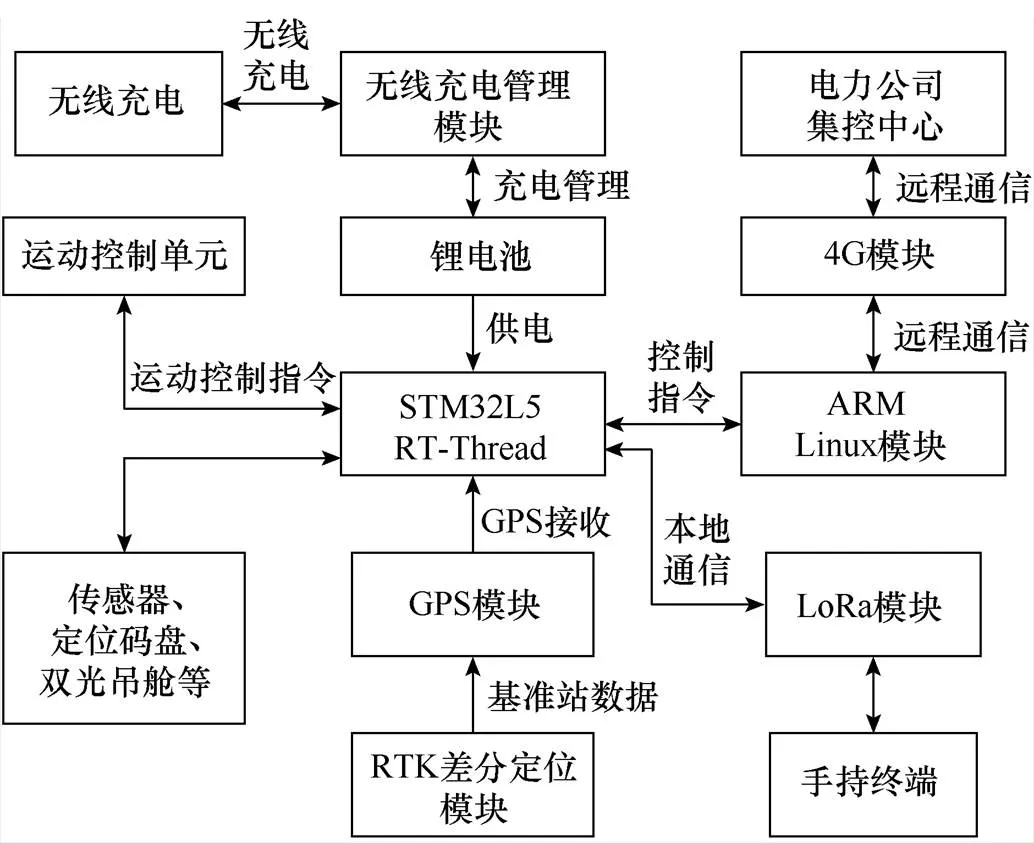
图3 大跨越输电线路巡检机器人本体硬件设计
3.2 无线充电管理
目前,机器人自动充电存在以下不足:①受到自动定位精度的限制,不易对准充电触点;②有线充电要求充电触点对接精确性高,增加了设计的复杂性;③充电触点多次插拔,会引起机械磨损,导致接触松动;④长期处于室外环境,充电触点容易附着污物,导致接触不良,也极易引起电路短路,严重影响产品的稳定性、可靠性。锂电池使用过程中最重要的就是充电,充电性能的好坏直接影响着锂电池的使用寿命和电池性能,采用平衡充电模式可以有效提高电池充电效率,进而延长锂电池的使用寿命[14]。
为解决以上问题,本文设计无线充电系统[15],在塔头安装无线充电发射装置,机器人上端安装无线充电接收装置和红外定位装置。为实现充电位置的精确定位,采用红外开关和Sick高精度防水码盘,利用Z相零位脉冲消除测量时的累计误差。为实现锂电池的自动平衡充电功能,本文基于TI公司生产的电量监测计芯片组BQ40Z80,针对过电压、欠电压、过电流、短路电流、过载和过热条件,以及其他与电池组和电池相关的故障,设计了锂电池自动充电模块,提供安全保护功能,可准确预计电池组的运行时间,最大限度延长电池运行时间和提高有效电池容量。锂电池平衡充电过程如图4所示。
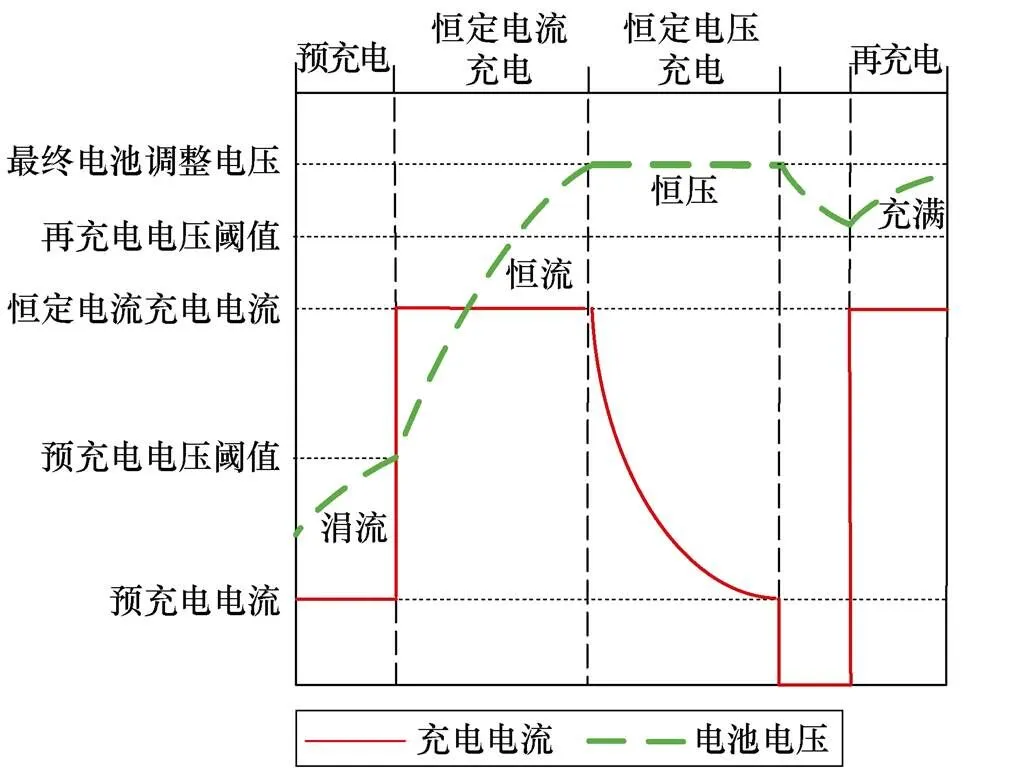
图4 锂电池平衡充电过程
3.3 定位系统
GPS的定位精度受地球电离层、卫星轨道误差等因素影响,导致民用GPS的定位精度很差,其定位误差达到几米,巡检机器人在进行大跨越输电线路自动巡检时,需要实现厘米级别定位,才能准确检测电力设备运行状况、采集到输电走廊及其设备的清晰图片、视频,采用GPS定位无法满足巡检机器人自动巡检定位的要求。因此,需要在塔头安装差分定位系统基准站,其采用双频载波相位差分技术[16],即RTK,用于实现机器人自动巡检时的厘米级别定位。首先塔头基准站将观测到的载波相位测量值和自身的坐标信息一起发送给机器人,机器人接收GPS模块的载波相位和来自基准站的载波相位测量值,通过差分的方式,逐步消除机器人定位测量数据中的误差,Linux系统实时处理相位差分观测值,解算出巡检机器人的行走坐标。其应用依赖基准站的差分信号,利用差分定位把GPS模块的各种误差计算出来,将其与GPS对基准站的定位结果作比较,就可以得到定位信号的偏差,再将这个偏差发送给需要定位的巡检机器人,就可以使巡检机器人获得相对精准的位置信号。
本文基于嵌入式Linux平台设计了一种实用的载波相位差分技术,有效提高了巡检机器人定位的准确性和精度。在大跨越输电线路环境下进行测试,结果表明RTK定位系统运行稳定可靠,定位精度能够达到厘米级别,满足巡检机器人预置位巡检、拍照等实际要求,便于准确检测电力设备运行状况。RTK定位系统流程如图5所示。
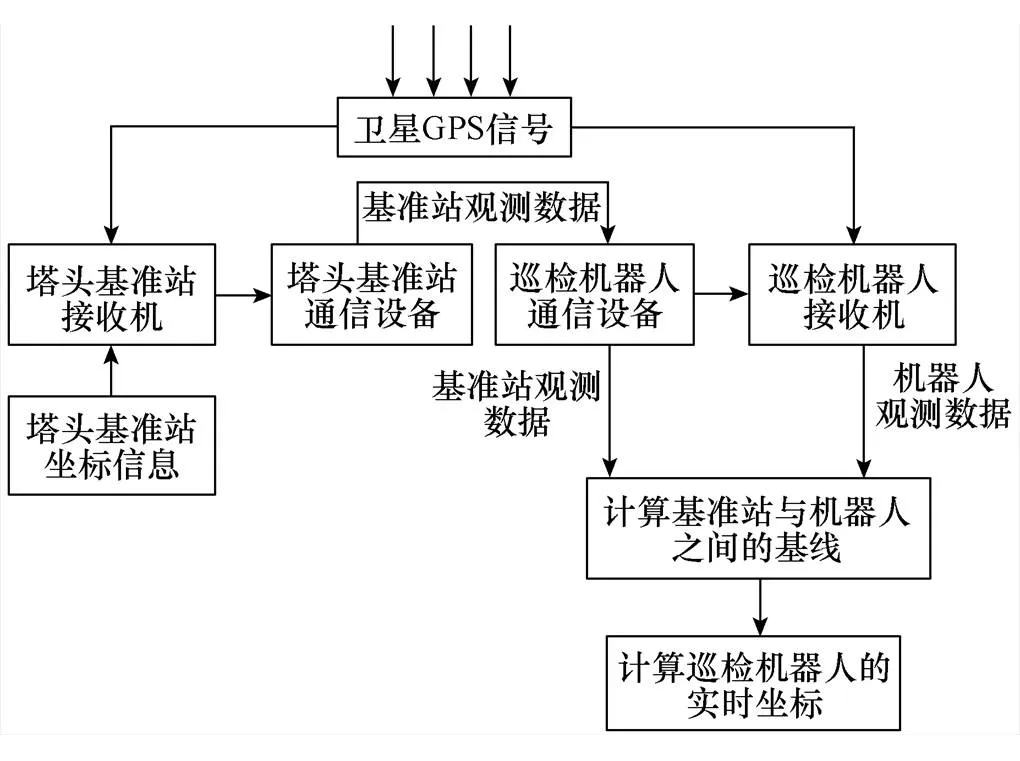
图5 RTK定位系统流程
3.4 远程监测平台
为了减轻工作量,便于巡检人员远程实时监测大跨越输电线路运行状况[17-18],机器人通过4G无线网络与服务器远程监测平台进行通信,巡检人员通过浏览器可以执行以下命令:下发巡检任务,查看机器人自身情况,查看输电通道当前运行状态,查看现场视频图片;实时展示线路、杆塔、机器人和机器人的位置等信息;查看最新的缺陷识别结果,导出缺陷报告。远程监测平台如图6所示。
4 模拟环境测试
输电线路巡检机器人系统在大跨越输电线路模拟环境下进行性能测试,巡检机器人本体通过越障桥行走到大跨越档距之间,其行走流畅,实时检测电力设备运行状况,双光红外摄像机可实时采集输电走廊及电力设备的图片,可对输电线路下过往船只实现准确识别[19-20],巡检机器人系统模拟环境测试和性能测试分别如图7和图8所示。模拟测试数据见表2。目前大跨越输电线路巡检机器人系统运行平稳,充电流畅,定位准确,视频传输实时性好,达到了项目研发设计的预期目标。

图6 远程监测平台
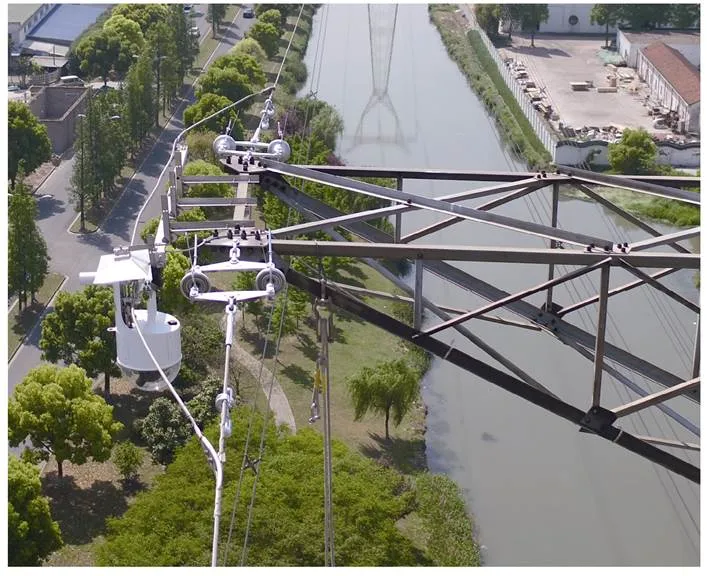
图7 巡检机器人系统模拟环境测试

图8 巡检机器人系统性能测试
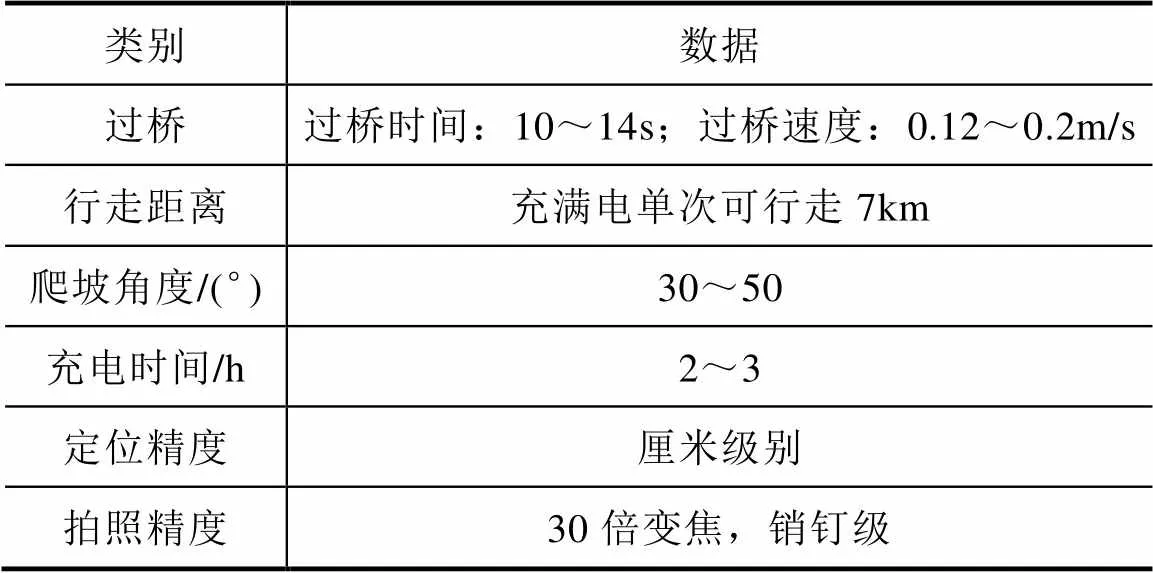
表2 模拟测试数据
5 结论
本文设计了一款大跨越输电线路巡检机器人系统,其由驻留充电巢穴、越障装置、差分定位系统、机器人本体和远程监测平台五部分组成,具有如下 特点:
1)机器人电池采用无线模式进行充电,具有无金属触点、无需精确对准等特点,解决了室外有线充电接触节点易磨损、易产生火花、充电对准困难等难点。
2)基于TI公司的电量监测计芯片组,设计了锂电池平衡充电模块,实现了锂电池平衡充电功能,有效延长了锂电池的使用寿命。
3)利用RTK定位系统配合机器人行走码盘,实现了巡检机器人系统厘米级别定位,实现了大跨越输电线路高精度全自动化智能巡检。
4)搭载三轴维稳云台相机,提高了采集图片的清晰度和稳定性,利用其光学变焦功能可在空中看清地面物体的细节。
5)热成像红外吊舱可以实现双光画中画显示、测温、可见光变焦、移动跟踪等功能。
大跨越输电线路巡检机器人系统在模拟线路运行测试,现场证明机器人行走平稳,运行稳定,实现了大跨越输电线路的远程监测和自动化巡检,提高了巡检人员的工作效率和大跨越线路巡检的智能化水平。
[1] 刘贞瑶, 高方玉, 姜海波, 等. 输电线路智能巡检机器人系统的研制及应用[J]. 电力信息与通信技术, 2019, 17(8): 57-62.
[2] 吴功平, 肖晓晖, 肖华, 等. 架空高压输电线路巡线机器人样机研制[J]. 电力系统自动化, 2006, 30(13): 90-93.
[3] 彭向阳, 钱金菊, 吴功平, 等. 架空输电线路机器人全自主巡检系统及示范应用[J]. 高电压技术, 2017, 43(8): 2582-2591.
[4] 李睿. 基于物联网的输电线路巡检机器人控制策略研究[J]. 计算机测量与控制, 2019, 27(11): 70-74.
[5] 何缘. 沿地线穿越越障的架空输电线路巡检机器人的研究[D]. 武汉: 武汉大学, 2016.
[6] 魏苇. 基于差分GPS的变电站巡检机器人定位导航系统的研究[D]. 哈尔滨: 哈尔滨工业大学, 2015.
[7] 牛玉洁, 冷建伟. 应用于智能机器人的无线充电技术研究[J]. 计算机仿真, 2017, 34(11): 348-352.
[8] 刘贞瑶, 高方玉, 高安洁, 等. 一种输电线路智能巡检机器人的仿真设计[J]. 电气技术, 2019, 20(12): 41-45.
[9] 彭道刚, 关欣蕾, 戚尔江. 巡检机器人云台远程控制系统的设计[J]. 电气传动, 2018, 48(11): 43-47.
[10] 李和平, 陈育新. 基于物联网的矿井智能巡检机器人控制系统设计[J]. 机床与液压, 2015, 43(11): 119-122.
[11] 郭磊, 吴功平, 麦晓明, 等. 高压输电线路巡检机器人续航里程的预测方法[J]. 武汉大学学报(工学版), 2018, 51(4): 347-355.
[12] 李祥, 崔昊杨, 皮凯云, 等. 基于STM32的变电站巡检机器人系统设计[J]. 现代电子技术, 2017, 40(17): 150-153.
[13] 卿晓东, 苏玉刚. 电场耦合无线电能传输技术综述[J]. 电工技术学报, 2021, 36(17): 3649-3663.
[14] 葛学健, 孙跃, 唐春森, 等. 用于动态无线供电系统的双输出逆变器[J]. 电工技术学报, 2020, 35(4): 786-798.
[15] 许博. 高压线巡检机器人的设计与研究[D]. 哈尔滨:哈尔滨工业大学, 2017.
[16] 袁正午, 何格格. 一种高精度的GPS-RTK定位技术设计与实现[J]. 电子技术应用, 2018, 44(6): 63-67.
[17] 王波, 吴功平, 许鸣. 输电线路巡检机器人后台管理及诊断系统[J]. 武汉大学学报(工学版), 2014, 47(1): 110-114.
[18] 陈振宇, 邹德华, 彭沙沙, 等. 10kV配电网带电作业机器人及其作业臂绝缘分析[J]. 电气技术, 2021, 22(10): 65-70.
[19] 张峰, 郭锐, 卢士彬, 等. 高压输电线路巡检机器人障碍物识别与定位[J]. 中国电力, 2019, 52(4): 111- 118.
[20] 张金贵, 李从飞. 基于无线技术的变电站自动巡检机器人[J]. 电气自动化, 2014, 36(2): 36-38.
Design of inspection robot system for large span transmission line
CAI Guangzhu YANG Zhen ZHENG Pengchao
(Beijing State Grid Fidelity Technology Development Co., Ltd, Beijing 100071)
Large span transmission lines are often located in the harsh natural environment, such as typhoon, strong vibration, serious salinity and so on. In order to solve the problem that large span transmission lines cannot be inspected manually, this paper designs a transmission line inspection robot system. The inspection robot can cross from the tower head to the ground wire through the obstacle device, and then carry out inspection work along the ground wire. Intelligent charging nests are installed on the tower heads at both ends of the long span, which can charge the robot battery wirelessly, and effectively solve the problem of robot charging in the field. RTK differential positioning system with high-precision walking code disk can achieve centimeter level accurate positioning of robot, and improve the accuracy of image and video acquisition of robot. Through the 4G module, the robot can transmit its own state, transmission channel operation information, pictures, videos, etc. to the server background, which is convenient for inspectors to check whether the line is running normally in real time. The robot effectively reduces the labor intensity and working danger of the inspectors of transmission lines, and realizes the high precision automatic inspection of large span transmission lines.
transmission line; large span; Internet of Things; wireless charging; differential positioning system; remote monitoring system
浙江省电力公司重点科技项目(5211NB1800LG)
2021-11-03
2021-11-22
蔡光柱(1988—),男,山东省禹城市人,硕士,高级工程师,主要从事输电线路物联网设备、线路巡检机器人的设计开发工作。
