基于位置误差概率模型的物流无人机安全间隔评估方法研究*
2022-04-26王莉莉
王莉莉,阳 杰
(中国民航大学 空中交通管理学院,天津 300300)
0 引言
近年来,随着无人机技术的日益成熟和物流行业的迅速发展,越来越多的无人机被应用于物流配送中。2017年3月,民航局批准顺丰在江西省赣州市开展无人机物流配送业务,并为其颁发了全国首张无人机航空运行(试点)许可证,截止2020年底,顺丰、京东等物流无人机已累计飞行14万架次。随着无人机种类和数量的飞速增长,空域内无人机之间的运行冲突问题也逐渐凸显,为无人机的空中管理提出了新的难题,故研究物流无人机的运行风险及安全间隔具有重要意义。
目前,国内外对于无人机运行风险与间隔的研究还处于探索阶段,并未形成成熟的理论与方法,相应的规章也较少。在民航领域,安全间隔研究最初起步于REICH[1]针对航路阶段建立的REICH模型,随后不少学者陆续提出交叉航路、EVENT等模型[2-4]对航路上航空器的安全间隔进行评估,后有大量学者基于上述模型研究航路和跑道运行的碰撞风险和间隔标准[5-10]。
无人机方面,主要以混合空域运行为背景,对无人机与有人机之间的安全间隔进行研究,高俊杰[11]结合无人机飞行特点建立无人机在隔离空域运行的运行风险评估模型,并给出了碰撞风险与空域内无人机密度的关系;杨新湦等[12]考虑民机尾流对无人机的影响,对REICH碰撞模板进行改进,分析了不同民机速度与机型对纵向安全间隔的影响;邓力[13]使用分列步θ法求解碰撞概率模型,得到无人机与民航客机碰撞概率与两机几何中心距离的关系;潘卫军等[14]考虑人机环管等因素,计算不同空域无人机与有人机之间的侧向安全间隔;赵建华等[15]通过AHMEMCR模型分析了无人机不同机型与运输类飞机之间的碰撞概率及与碰撞模板表征值的关系。
以上安全间隔的研究大多考虑有人机之间或有人机与无人机之间的碰撞风险,并未针对无人机之间的运行建立安全间隔评估模型。基于此,针对基于地面控制系统的物流无人机自动飞行的特点,考虑无人机速度误差、定位误差以及侧风等影响因素,建立无人机基于位置误差概率的碰撞风险评估模型,并计算无人机运行的侧向、纵向和垂直方向的最小安全间隔。通过算例仿真分析,验证模型在无人机空域管理的重要作用。
1 问题描述及相关理论
1.1 问题描述
目前,大多数物流无人机的运行控制都依赖于无人机地面控制系统(UAV Ground Control System,UGCS)[16 ]。UGCS对飞行任务进行规划,无人机进行跟踪导航,实时飞行数据进行监视和储存,并可对其姿态、航向和速度等进行自主调整[17],在保证无人机空中飞行安全发挥重要作用。虽然国内的UGCS大多可以支持多架无人机同时监控,但通过调研发现,由于国内还未出台无人机运行间隔的相关规定且出于安全考虑,大多数物流配送航线不允许多架无人机同时运行,在同一航线上,大多是前1架无人机落地后才允许后1架无人机起飞。
为提高空域利用率和物流配送效率,根据无人机在UGCS监控下的飞行特点建立基于位置误差概率的无人机巡航阶段碰撞风险评估模型,为多架无人机运行在同一航线并保持相应的安全间隔提供理论依据。
1.2 UGCS监控下物流无人机飞行特点
国内外大多数的UGCS对无人机飞行的监视与控制主要包括以下几个方面[18-19]:
1)飞行任务的预设和飞行轨迹的规划:在飞行前,将航点、加速度、速度等信息输入系统,即可对无人机飞行任务和轨迹进行规划,并且在整个飞行过程中,实现自主飞行,无人机地面指挥决策者只在无人机航向、速度、位置等出现异常时对其进行干预。
2)飞行速度的控制:若由于自身设备原因,在匀速巡航阶段无人机出现加速或减速等现象,UGCS在探测到速度异常后,一旦速度偏差数值大于系统设定的最大允许值,系统将提示无人机指挥决策者进行决策,若决策者3 s内未做出决策,系统将自动根据预设参数命令无人机减速或加速至指定速度后保持匀速飞行。
3)飞行航向和高度的控制:与速度控制类似,当无人机出现航向和高度异常且实时位置偏差数值大于系统设定的最大允许值,系统将进行提示决策。
目前国内未对无人机的管制进行统一规定,以上为大多数物流无人机在当前UGCS监控下的控制原理及实际飞行特点,对未来无人机的空中交通管理方式需进一步研究。
1.3 无人机飞行安全影响因素
结合UGCS监控下的物流无人机实际运行情况,将无人机飞行安全的影响因素总结为以下几点:
1)定位误差:UGCS对无人机进行跟踪定位时,主要利用机载定位系统确定位置信息并通过通信系统将信息传输至UGCS中,在此过程中,由于导航设备自身缺陷存在的误差、气象因素对信号的干扰、系统对信号处理的失误以及通信模块产生的延迟等原因导致定位误差,其实际位置会与预定航线位置存在偏差,将会影响两架无人机之间的实际间隔,从而影响无人机飞行安全。
2)速度误差:无人机在飞行时,由于机载设备及环境等因素,其飞行速度也会存在一定的误差,且从动态飞行的角度看,速度偏差也是影响无人机飞行安全的因素之一。
3)侧风:物流无人机主要飞行在低空空域,虽然低空风速较小,但由于无人机自身重量较小,巡航阶段的侧风将影响无人机的侧向位置,从而影响飞行安全。
1.4 安全目标水平与安全间隔
根据ICAO对碰撞风险的规定,碰撞风险一般表示为1 h内航空器出现碰撞的次数,碰撞概率为2架航空器在侧向、纵向、垂直3个方向发生重叠的概率。3个方向上的可接受的碰撞风险即安全目标水平为5×10-9次事故/飞行小时[20],2架航空器的1次碰撞看作2次事故,则根据安全目标水平可计算出无人机之间运行的最小安全间隔。
2 无人机碰撞风险评估模型
2.1 位置误差概率模型
无人机的碰撞风险主要取决于无人机之间的实际距离,无人机大致的运动趋势可以通过UGCS直观推测,为分析在不同时刻无人机碰撞风险的变化过程,采用可以直观展示无人机之间相对位置关系的位置误差概率模型来评估巡航阶段无人机的碰撞风险。无人机在飞行时,由UGCS进行监控,并通过飞行控制系统对无人机的飞行姿态进行调整,但UGCS和飞行控制系统在运行时会产生系统误差,对无人机实际位置造成影响,从而产生位置误差。无人机在实际飞行时,其位置误差主要体现于无人机在定位和速度上的偏差,故综合考虑无人机的定位误差和速度误差,从侧向、纵向和垂直3个方向来研究碰撞风险,以垂直无人机预定航线方向为侧向即x轴,预定航线方向为纵向即y轴,垂直地面为垂直方向即z轴建立坐标系。

(1)

则两无人机在t时刻的纵向碰撞风险Py(t)如式(2)所示:

(2)
同理,无人机在t时刻的侧向和垂直方向碰撞风险Px(t)、Pz(t)如式(3)~(4)所示:

(3)

(4)

则2架无人机在3个方向上的总碰撞风险P(t)如式(5)所示:
P(t)=2Px(t)Py(t)Pz(t)
(5)
因此,需要建立无人机之间动态运动方程Dx(t),Dy(t),Dz(t)对碰撞风险进行求解。通过计算不同的初始间隔Dx(0),Dy(0),Dz(0)对应的碰撞风险值与安全目标水平比较即可得出3个方向的最小安全间隔。
2.2 纵向碰撞风险评估模型
根据UGCS无人机自主飞行特点及速度控制的原则,考虑2架无人机在航路上同向巡航,且后机在某时刻起加速飞行导致纵向速度出现偏差,系统对其检测并命令后机减速至指定速度,前机保持速度不变,建立无人机纵向碰撞风险评估模型,如图1所示。
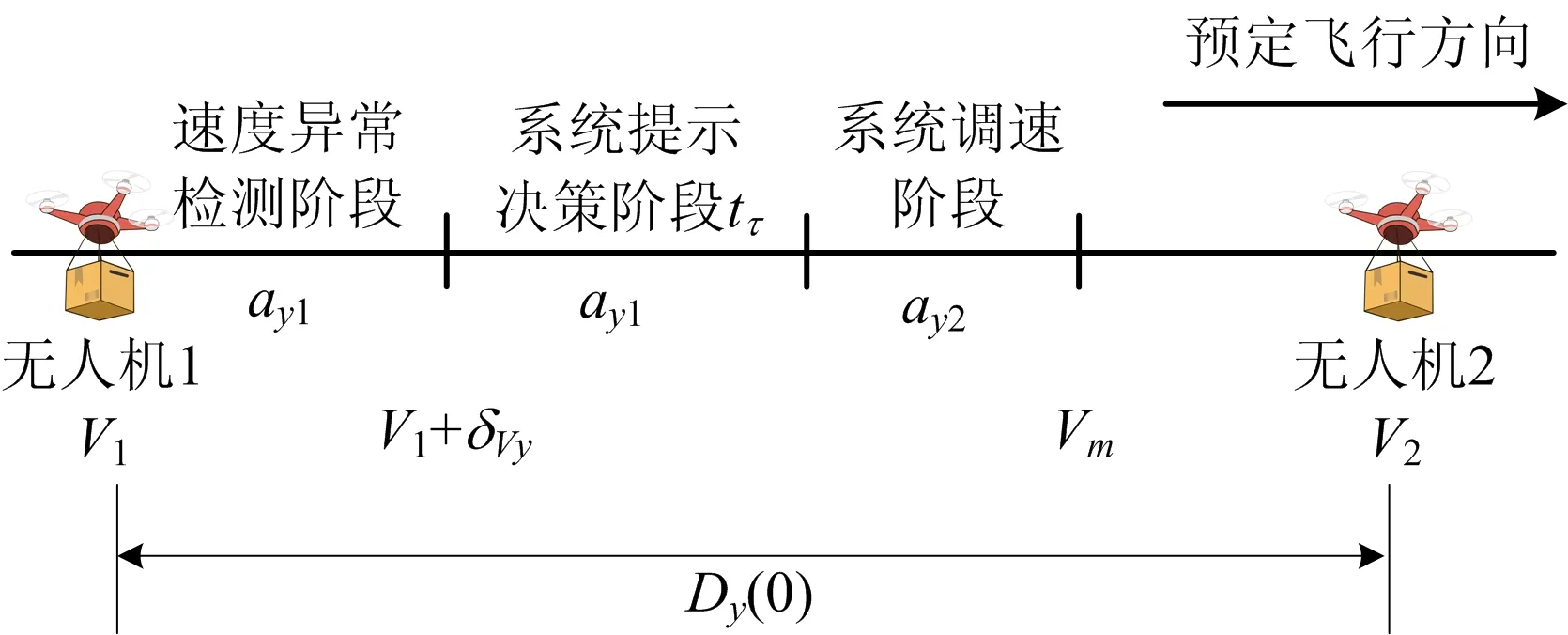
图1 纵向碰撞风险评估模型Fig.1 Assessment model of longitudinal collision risk
模型假设:
1)不考虑系统延迟及无人机执行指令的反应时间;
2)整个过程中不考虑人的干预。
以无人机1出现速度偏差开始,经系统调速到Vm为止,此阶段2架无人机在侧向、纵向和垂直方向上相对位置关系如式(6)所示:
Dx(t)=0,t∈(0,ty2]
Dz(t)=0,t∈(0,ty2]
(6)
2.3 侧向碰撞风险评估模型
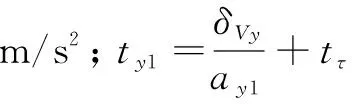
根据UGCS无人机自主飞行特点及航向控制的原则,考虑2架无人机在航路上保持侧向间隔同向巡航,巡航阶段存在侧风。在航路飞行时2机同时出现航向偏移的概率极低,故只考虑1架无人机出现航向异常的情况,即其中1架无人机在某时刻侧向上出现航向偏移且受侧风的影响导致航迹侧向偏置,另1架无人机航向正常但同时受侧风影响,建立无人机侧向碰撞风险评估模型,如图2所示。
图2 侧向碰撞风险评估模型Fig.2 Assessment model of lateral collision risk
飞行过程中,虽然无人机2未出现航向异常情况,但由于风的影响,无人机2也将出现侧向位置偏差,当其偏差量大于系统设定的最大允许值时,系统亦对其进行决策提醒,由于风向未知,故以无人机1出现航向偏移时开始,飞回预定航线为止,2机的相对位置关系需要进行分类讨论:
Dy(t)=|(V1cosαx-V2)t|,t∈(0,tx2]
Dz(t)=0,t∈(0,tx2]
(7)
(8)

2.4 垂直碰撞风险评估模型
与侧向安全风险模型相似,根据UGCS高度控制的原则,考虑2架无人机在航路上同向巡航,且其中1架无人机在垂直方向上出现高度异常的情况,建立无人机垂直碰撞风险评估模型,如图3所示。
无人机1垂直方向上航迹偏移角度αz,系统设定垂向实时位置偏差最大允许值δz,2机初始垂直间隔Dz(0),假设不考虑高度测量误差,其他模型参数及模型假设与2.3相同。
以无人机1出现高度偏移时开始,飞回预定高度为止,2机在此阶段的侧向、纵向和垂直方向上相对位置关系如式(9)所示:
(9)

3 算例仿真
选取顺丰在江西省赣州市开辟的某条无人机配送航线进行仿真计算。该航线的航点信息如表1所示,航线示意图如图4所示。

图4 航线示意Fig.4 Schematic diagram of air route
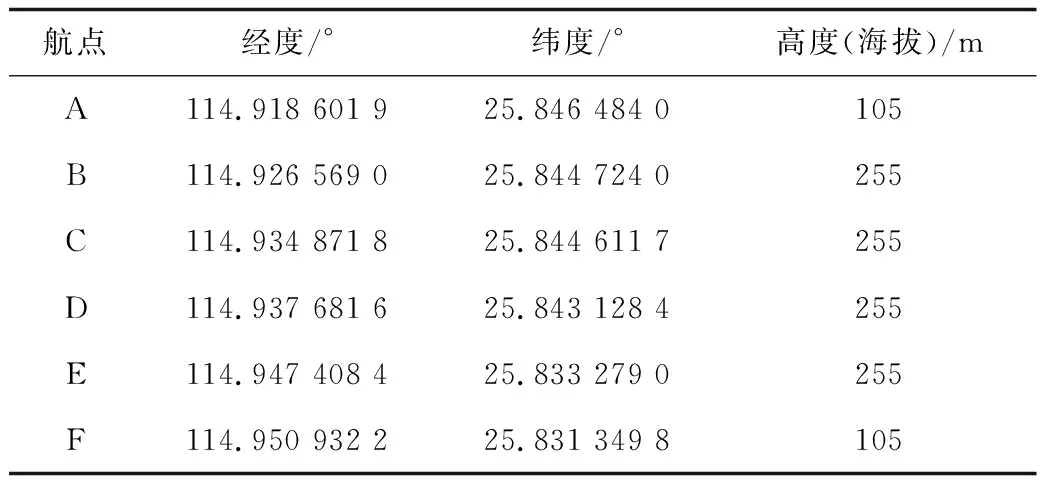
表1 江西省赣州市某航线航点信息Table 1 Route information of an airline in Ganzhou City,Jiangxi Province
收集UGCS中2021年5月某1天该航线上所有无人机的飞行数据共26 956条。首先根据数据将每1架无人机的飞行轨迹进行拟合,如图5所示,图中虚线为预定飞行航线,实线为各无人机实际飞行轨迹。
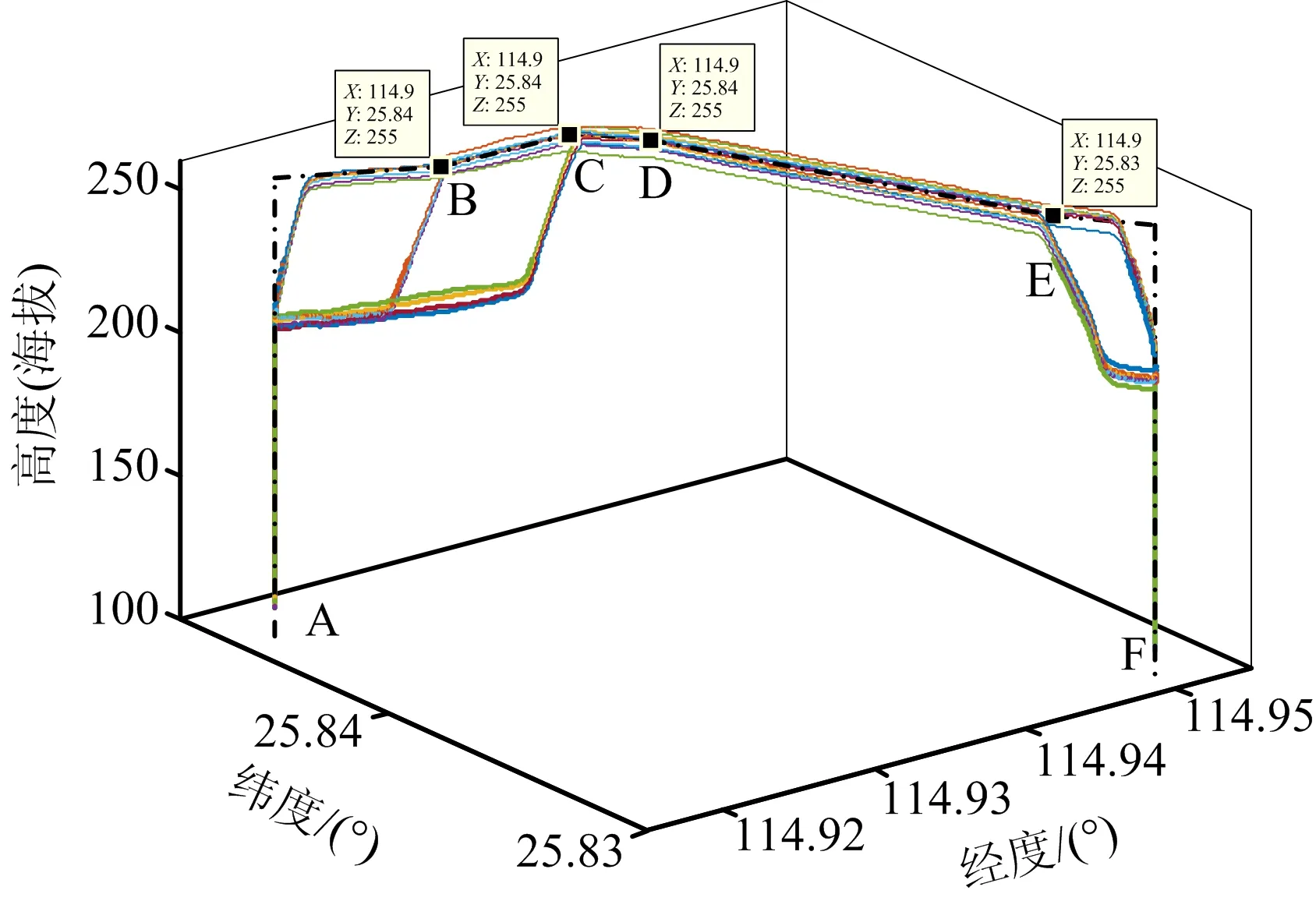
图5 无人机飞行轨迹Fig.5 Flight trajectory of UAVs
从图5可以看出,无人机从A点垂直起飞,上升至一定高度后部分无人机继续上升至指定高度随后平飞至B点和C点,另一部分无人机先平飞一段距离再上升至B点或C点,巡航至E点后降落于F点。故选取航线中C-D-E段进行巡航阶段无人机飞行间隔仿真分析。
目前该航线上主要运行的物流配送无人机型号为Ark方舟无人机和H4四旋翼无人机2种,模型计算相关参数如表2~4所示,其中定位误差标准差、速度误差标准差、巡航速度和加速度由UGCS数据计算获得,航路风速和风向根据文献[21]所得。
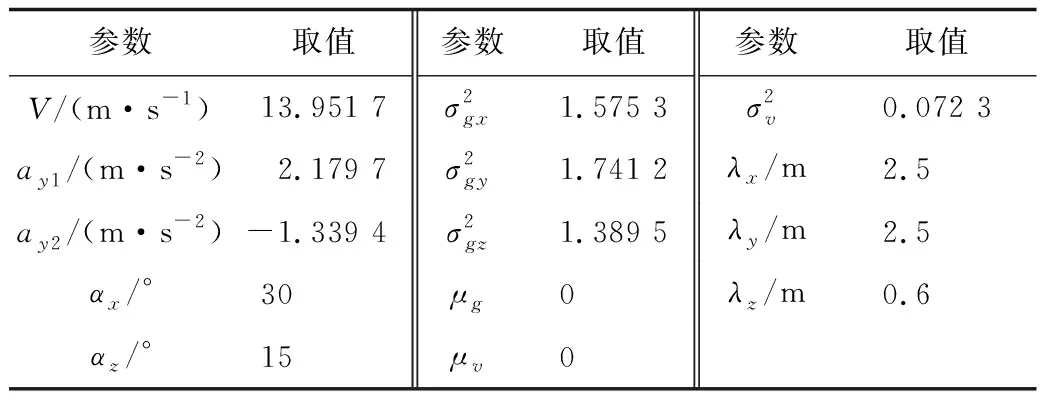
表2 Ark方舟无人机相关参数Table 2 Related parameters of Ark UAV
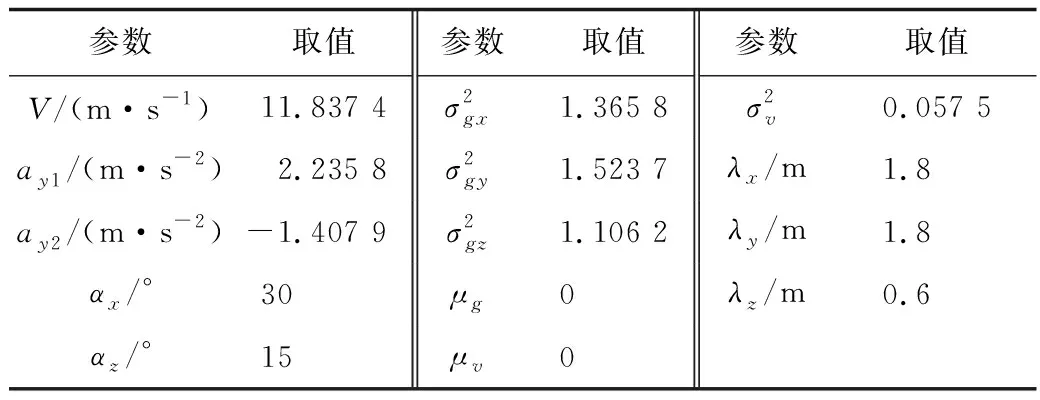
表3 H4四旋翼无人机相关参数Table 3 Related parameters of H4 quadrotor UAV

表4 模型计算其他参数Table 4 Other parameters of model calculation
3.1 纵向安全间隔结果分析
由表2~4数据,结合前文建立的碰撞风险评估模型,计算无人机1与无人机2不同机型组合之间的最大碰撞风险与初始纵向距离的关系,并与安全目标水平进行比较,如图6所示。
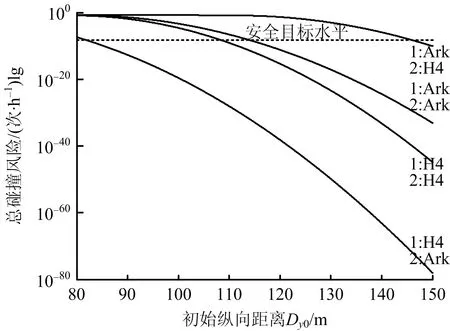
图6 不同机型组合碰撞风险与初始纵向距离Fig.6 Collision risk and initial longitudinal distance of different model combinations
由图6可知2机之间的碰撞风险随初始纵向距离的增大而减小。在所有组合中,无人机1为Ark,无人机2为H4的最小纵向安全间隔最大,为145.31 m,主要是因为处于后机的Ark巡航速度、速度误差和定位误差都较H4大,在整个过程中系统对其进行调速的时间也较长,且误差越大,同样的距离碰撞风险越大,故该无人机组合下的纵向最小安全间隔最大,巡航阶段不同机型组合之间在纵向上的最小安全间隔如表5所示。
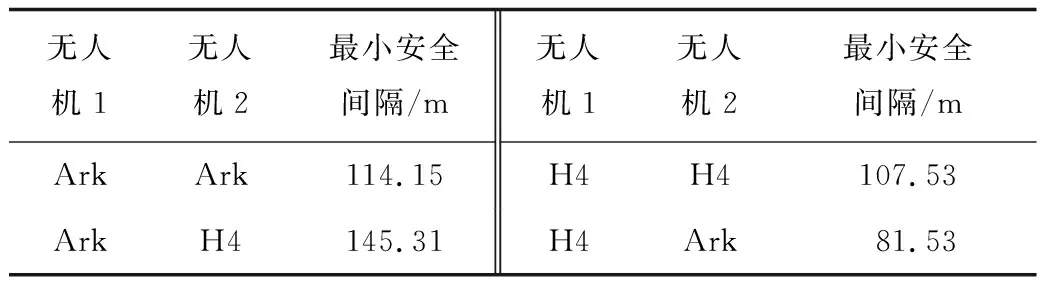
表5 不同机型组合纵向最小安全间隔Table 5 Longitudinal minimum safety separation under different model combinations
以无人机1为Ark无人机2为H4的最小纵向安全间隔145.31 m为例,分析2机在上述过程中3个方向及总碰撞风险随时间t的变化关系,如图7所示。
图7 纵向安全间隔下三个方向及总碰撞风险Fig.7 Three directions and total collision risk under longitudinal safety interval
由图7可知,由于2无人机在侧向和垂直方向上相对距离始终保持为0,故侧向和垂直碰撞风险保持不变。纵向上,因为一开始2机已保持一定的纵向距离,随后2机相对距离不断减小,且Vm取值为2无人机巡航速度较小值,故无人机1调速至Vm时2机之间的距离最小,随后2机速度相同,相对距离保持不变,纵向和总碰撞风险峰值均出现在无人机1调速至Vm时,总碰撞风险峰值为4.998 5×10-9次事故/飞行小时。
3.2 侧向安全间隔结果分析
侧向上无人机1与无人机2不同机型组合之间的最大碰撞风险与初始侧向距离的关系如图8所示,最小安全间隔计算结果如表6所示。

表6 不同机型组合侧向最小安全间隔Table 6 Lateral minimum safety separation of different model combinations
图8 不同机型组合碰撞风险与初始侧向距离Fig.8 Collision risk and initial lateral distance of different model combinations
以无人机1和无人机2均为Ark的最小侧向安全间隔46.92 m为例,分析2机在上述过程中3个方向及总碰撞风险随时间t的变化关系,如图9所示。
由图9可知,由于整个过程中2无人机在垂直方向上相对距离始终保持为0,故垂直碰撞风险保持不变。纵向上,起初2机纵向距离为0。随后由于无人机1航向发生侧向偏移,纵向分速度小于无人机2,2机纵向距离随之增大,碰撞风险不断减小。侧向上,2机侧向和总碰撞风险最大值发生在系统调整航向前,此时2机侧向距离最小。总碰撞风险峰值为4.952 6×10-9次事故/飞行小时。
图9 侧向安全间隔下三个方向及总碰撞风险Fig.9 Three directions and total collision risk under lateral safety interval
3.3 垂直安全间隔结果分析
垂直方向上无人机1与无人机2不同机型组合之间的过程最大碰撞风险与初始距离的关系如图10所示,最小安全间隔计算结果如表7所示。
图10 不同机型组合碰撞风险与初始垂直距离Fig.10 Collision risk and initial vertical distance of different model combinations

表7 不同机型组合垂直方向最小安全间隔Table 7 Vertical minimum safety separation of different model combinations
以无人机1为Ark和无人机2为H4的最小垂直安全间隔38.16 m为例,2机在上述过程中3个方向及总碰撞风险随时间t的变化关系,如图11所示。
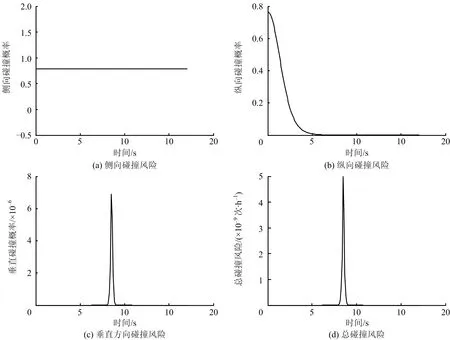
图11 垂向安全间隔下三个方向及总碰撞风险Fig.11 Three directions and total collision risk under vertical safety interval
2机在侧向、纵向和垂直方向上的相对距离和碰撞风险分别与3.2中垂直、纵向和侧向的变化规律类似,不再进行赘述。此过程中,总碰撞风险峰值为4.999 7×10-9次事故/飞行小时。
由上述分析可知,无人机之间的碰撞风险与无人机速度、尺寸、定位误差和速度误差密切相关。在2机为同一机型的2种组合下,由于Ark的机型大小及位置误差均较H4大,其安全间隔也较H4大。在2机为不同机型的2种组合下,初始巡航速度较大者发生特殊情况时2机相对距离更大。综上可得,无人机安全间隔随定位误差和速度误差的增大而增大,且与速度和机型大小呈正比关系。结合上文分析,为满足航线上所有机型的运行安全,参考3个方向上不同机型组合的安全间隔最大值,为该物流配送航线上无人机运行规划最小安全间隔,即纵向为145.31 m,侧向47.94 m,垂直方向40.65 m。
4 结论
1)结合UGCS监控下无人机的飞行特点,考虑无人机定位误差和速度误差,建立基于位置误差概率的物流无人机碰撞风险模型,给出最小安全间隔计算方法。
2)以江西赣州物流配送航线进行仿真,分析不同机型组合的最小间隔,结果表明该航线上无人机运行的最小安全间隔为纵向145.31 m,侧向47.94 m,垂直方向40.65 m,计算方法及结果可为无人机规划安全间隔提供理论依据。
3)该航线上运行的机型较少,需要更多的机型数据进行深入研究,且对于人的干预及货物载重量的影响计算还有缺失,未来可以将其作为安全间隔的影响因素之一作进一步研究。